飛行時(shí)間(ToF)技術(shù)方案成為眾多傳感器廠商相繼追逐的熱點(diǎn),ToF技術(shù)與芯片供應(yīng)商是否都能夠提供良好的解決方案?有哪些技術(shù)方案值得工程師參考?電子發(fā)燒友網(wǎng)邀請(qǐng)到了德州儀器(TI)資深技術(shù)工程師,在8月30日上午10點(diǎn)舉行一場(chǎng)在線研討會(huì).
2018-08-22 18:48:30 18795
18795 利用ToF測(cè)量光脈沖的飛行時(shí)間基本上有兩種不同的方法:基于電荷耦合器件(CCD)技術(shù)的脈沖操作模式和連續(xù)波(CW)操作模式。
2021-10-29 14:43:563149 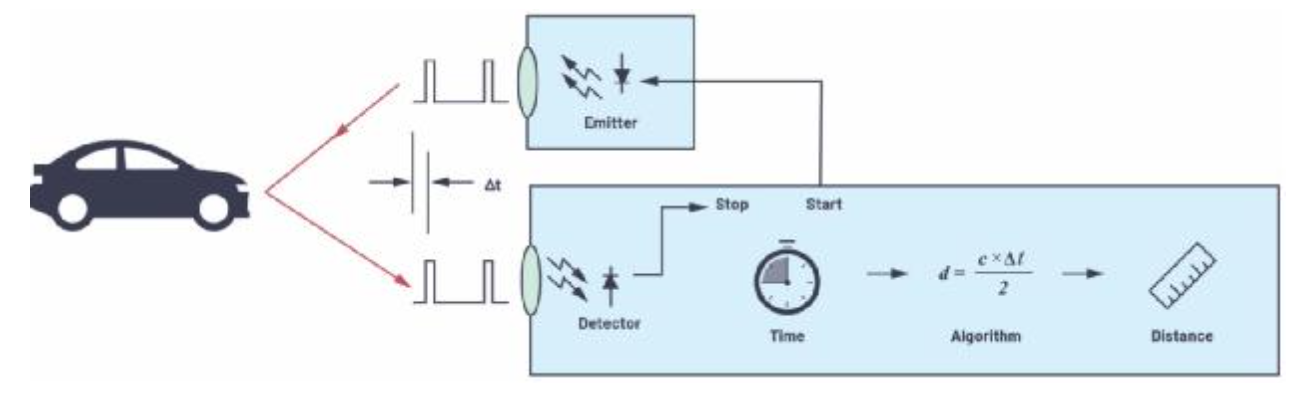
何謂飛行時(shí)間(ToF)?飛行時(shí)間(ToF):助力實(shí)現(xiàn)三維體驗(yàn) 讓創(chuàng)意起飛 我們已習(xí)慣使用Microsoft Teams、Zoom和Google Meet來(lái)改善遠(yuǎn)程會(huì)議體驗(yàn)。但即便如此,所有這些互動(dòng)
2023-07-01 11:26:401407 作者:Stephen Evanczuk 3D 飛行時(shí)間 (ToF)成像為視頻成像提供了一種有效的替代方法,可用于包括工業(yè)安全、機(jī)器人導(dǎo)航、手勢(shì)控制界面等在內(nèi)的廣泛應(yīng)用。但是,這種方法需要慎重整合光學(xué)
2023-10-03 14:48:00353 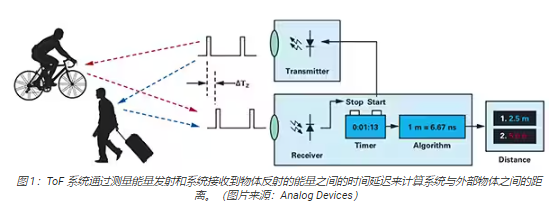
在剛剛閉幕的第六屆進(jìn)博會(huì)上,以“激活邊緣智能,共建數(shù)字中國(guó)”為主題的ADI展臺(tái)科技感滿(mǎn)滿(mǎn),現(xiàn)場(chǎng)共集合了20余款先進(jìn)創(chuàng)新的半導(dǎo)體解決方案的演示與展出,其中不乏多款首次在國(guó)內(nèi)亮相的產(chǎn)品,例如基于飛行時(shí)間
2023-11-14 19:35:02303 
ZLG的1D飛行時(shí)間傳感器模塊,集成了激光發(fā)射器(VCSEL)、多個(gè)單光子雪崩二極管接收器(SPAD)、時(shí)間-數(shù)字轉(zhuǎn)換器(TDC)和直方圖處理內(nèi)核,能對(duì)目標(biāo)物進(jìn)行有效檢測(cè)與測(cè)量。
2019-10-12 15:35:091953 橫跨多重電子應(yīng)用領(lǐng)域的全球領(lǐng)先的半導(dǎo)體供應(yīng)商意法半導(dǎo)體 (STMicroelectronics,簡(jiǎn)稱(chēng)ST;紐約證券交易所代碼:STM)于26日宣布其飛行時(shí)間(ToF)模塊出貨量達(dá)到10億顆。
2019-11-27 11:59:08828 意法半導(dǎo)體發(fā)布通用多區(qū)測(cè)距FlightSense? 飛行時(shí)間傳感器,為各種消費(fèi)電子和工業(yè)產(chǎn)品帶來(lái)精密的測(cè)距解決方案。
2021-09-13 14:10:163831 
貿(mào)澤電子 (Mouser Electronics) 即日起開(kāi)售ams OSRAM的TMF8820、TMF8821和TMF8828多區(qū)飛行時(shí)間傳感器。這些高性能的直接飛行時(shí)間 (dToF) 傳感器可達(dá)到5米的探測(cè)范圍,而其多鏡頭陣列顯著拓寬了照明范圍。
2022-03-15 15:31:111568 
`飛行模擬器,顧名思義也就是模擬飛行器飛行的設(shè)備。用來(lái)應(yīng)對(duì)真實(shí)世界在飛行過(guò)程中會(huì)遇到的空氣動(dòng)力、氣象、地理環(huán)境、飛行系統(tǒng)等,并且將仿真操控和飛行感官反饋給用戶(hù)。飛行模擬器對(duì)飛機(jī)駕駛艙各個(gè)部位進(jìn)行了
2020-09-07 17:20:34
交通道路,或者是讓汽車(chē)擁有“飛天”的本領(lǐng)!隨著科技飛速發(fā)展,新事物出現(xiàn)的速度,遠(yuǎn)遠(yuǎn)超出你的想象。在人群將目光集中在無(wú)人駕駛汽車(chē)的同時(shí),飛行汽車(chē)已悄然興起。無(wú)人駕駛飛行概念車(chē)從設(shè)計(jì)上可以看出這是一輛沒(méi)有
2018-09-18 10:49:26
嗨,我在互聯(lián)網(wǎng)上搜索了飛行時(shí)間技術(shù)的確切原理,但我得到的答案在不同的網(wǎng)站上有所不同。我最近購(gòu)買(mǎi)了VL53l0X傳感器,我需要ST產(chǎn)品TOF的確切原理。以上來(lái)自于谷歌翻譯以下為原文 Hi, i
2018-09-12 16:27:53
和自己所學(xué)結(jié)合起來(lái)。到現(xiàn)在,Crazepony四軸飛行器已經(jīng)在硬件上進(jìn)行了10多次的改進(jìn),在軟件,算法等方面經(jīng)歷了多次的改進(jìn)和整理。Crazepony的理念開(kāi)放,合作,分享是Crazepony一直
2015-12-07 09:37:19
算法在四軸飛行器視覺(jué)輔助導(dǎo)航方法中的應(yīng)用情況,并對(duì)比Kalman 方法,UKF 和EKF 算法融合四軸飛行器多傳感器信息的效果。
2021-05-13 06:06:01
全球鷹無(wú)人機(jī)在海外聯(lián)合作戰(zhàn)行動(dòng)中的需求非常旺盛,自2001年以來(lái),全球鷹無(wú)人機(jī)的成功飛行時(shí)間超過(guò)3.1萬(wàn)小時(shí)。俄亥俄州“全球鷹”項(xiàng)目負(fù)責(zé)人斯蒂夫·安伯格表示,“這個(gè)龐大的飛機(jī)代表了大福克斯
2020-08-24 06:29:53
具有多目標(biāo)檢測(cè)的飛行時(shí)間測(cè)距傳感器
2023-03-28 18:13:55
參數(shù)調(diào)整。 實(shí)地飛行測(cè)試在實(shí)地飛行之前先對(duì)四旋翼飛行器的參數(shù)舉行測(cè)量。由此可知飛行器機(jī)身和無(wú)刷電機(jī)占系統(tǒng)總重的80%左右,其余部分共占20%左右。因此要想減輕四旋翼飛行器的總重量,提高有效載荷和延長(zhǎng)飛行時(shí)間
2016-05-23 15:41:22
許多,剛開(kāi)始上手需要多練習(xí)幾次,可以適當(dāng)調(diào)節(jié)APP設(shè)置菜單中的前后左右以及方向靈敏度。總體而言該無(wú)人機(jī)操控上不是很難,但是想穩(wěn)定的飛行好事得多練練,另外就是遙控的手感欠佳。 平穩(wěn)性:無(wú)人機(jī)在平穩(wěn)起飛后
2016-05-03 11:22:44
申請(qǐng)理由:初期需要采集各種傳感器信號(hào),并進(jìn)行處理。因此需要一個(gè)開(kāi)發(fā)板來(lái)完成初期的計(jì)劃。項(xiàng)目描述:開(kāi)發(fā)項(xiàng)目:四軸飛行器初步方案:11月1號(hào)-11月15完成硬件設(shè)計(jì)制作pcb并打樣成功。11月16號(hào)
2015-11-02 11:19:06
MICOKIt主板系統(tǒng)的控制下,四旋翼飛行器在飛行時(shí)能夠更加穩(wěn)定。同時(shí)我會(huì)把測(cè)試結(jié)果反饋給貴公司。項(xiàng)目描述:基于物聯(lián)網(wǎng)的四旋翼飛行器,是以四旋翼飛行器為主體,其帶有主控制芯片、傳感器和信號(hào)發(fā)送模塊等
2015-07-31 21:17:45
飛行器中使用到了四元數(shù)和歐拉角,姿態(tài)解算的核心在于旋轉(zhuǎn)。姿態(tài)解算中使用四元數(shù)來(lái)保存飛行器的姿態(tài),包括旋轉(zhuǎn)和方位。在獲得四元數(shù)之后,會(huì)將其轉(zhuǎn)化為歐拉角,然后輸入到姿態(tài)控制算法中。姿態(tài)控制算法的輸入?yún)?shù)
2019-07-14 05:00:00
,并由尾部的兩個(gè)導(dǎo)向扇控制方向。這樣的設(shè)計(jì),旨在讓該飛行器穿梭在建筑物稠密的城市空間,并且能夠打破其他飛行器的高度障礙。我們在電影里可能會(huì)看到直升機(jī)穿梭在兩棟大樓中間,事實(shí)上這是非常危險(xiǎn)的,這類(lèi)的飛行
2014-03-28 16:54:32
一 任務(wù)及設(shè)計(jì)要求1.1任務(wù)模擬飛行器(如無(wú)人機(jī)、導(dǎo)彈等)在空中飛行過(guò)程中使用九軸加速度/陀螺儀/磁力計(jì)模塊采集姿態(tài)信息;并且能使用攝像頭模塊采集圖像信息實(shí)現(xiàn)目標(biāo)檢測(cè)功能,從而實(shí)現(xiàn)飛行器朝目標(biāo)飛行
2021-08-09 06:15:54
推薦課程:張飛四旋翼飛行器視頻套件,76小時(shí)吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post全國(guó)電賽的四旋翼
2013-08-29 20:50:38
四軸飛行器的發(fā)展背景;四軸飛行器的研究現(xiàn)狀;四軸飛行器的研究意義;哪位大神知道的說(shuō)下,想了解啊
2012-07-27 14:09:48
便宜。基本特點(diǎn):飛行器能夠平穩(wěn)的升降,懸停;飛行器能夠以0---90度任意角飛行,任何的角度旋轉(zhuǎn);飛行器在飛行過(guò)程中能夠自動(dòng)避障,自動(dòng)選擇最佳避障路線,不需要人的遙控;計(jì)劃安排
2013-10-28 10:26:53
哪個(gè)模塊最適合從距離傳感器模塊飛行時(shí)間 (ToF) 測(cè)距傳感器測(cè)量準(zhǔn)確距離。
2022-12-28 11:45:31
的扭矩(即鎖尾),而四旋翼飛行器對(duì)角螺旋槳采用正反槳設(shè)計(jì),從而不需要額外的機(jī)構(gòu)進(jìn)行“鎖尾”。如圖 1.1所示,4個(gè)螺旋槳呈十字形對(duì)稱(chēng)分布,1和2 號(hào)槳逆時(shí)針轉(zhuǎn)動(dòng),而3和4號(hào)槳順時(shí)針轉(zhuǎn)動(dòng),但4個(gè)螺旋槳
2015-10-23 11:30:24
5 k m,飛行高度 1 0 0 m,續(xù)航時(shí)間 1h ,有效載荷約 5 0 0 g , 完全能夠填補(bǔ)目前國(guó)際上在該范 圍內(nèi)偵察手段的空白。2 )未來(lái)的微型四旋翼飛行器將完全能夠達(dá)到美國(guó)國(guó)防預(yù)研局
2013-11-28 09:29:12
四旋翼飛行器結(jié)構(gòu)和原理+四軸飛行diy全套入門(mén)教程基于STM32的四旋翼飛行器視頻教程推薦課程:張飛四旋翼飛行器視頻套件,76小時(shí)吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2019-01-14 22:06:30
旋翼作為飛行的直接動(dòng)力源,旋翼對(duì)稱(chēng)分布在機(jī)體的前后、左右四個(gè)方向,四個(gè)旋翼處于同一高度平面,且四個(gè)旋翼的結(jié)構(gòu)和半徑都相同,旋翼1 和旋翼3 逆時(shí)針旋轉(zhuǎn),旋翼2 和旋翼4 順時(shí)針旋轉(zhuǎn),四個(gè)電機(jī)對(duì)稱(chēng)的安裝
2019-02-18 15:02:22
、產(chǎn)品簡(jiǎn)介及行業(yè)發(fā)展 《2014年中國(guó)四軸飛行器市場(chǎng)現(xiàn)狀分析及發(fā)展趨勢(shì)研究報(bào)告》在具體研究中,采用定性與定量相結(jié)合、理論與實(shí)踐相結(jié)合的方法,充分運(yùn)用國(guó)家統(tǒng)計(jì)局、海關(guān)總署、四軸飛行器相關(guān)相關(guān)行業(yè)協(xié)會(huì)
2018-01-02 16:16:52
主要負(fù)責(zé)解算當(dāng)前飛行姿態(tài)、控制電調(diào)等功能。以十字飛行模式為例,l號(hào)旋翼為頭,1、3號(hào)旋翼逆時(shí)針旋轉(zhuǎn),2、4號(hào)旋翼順時(shí)針旋轉(zhuǎn),如圖1所示。參照飛行狀態(tài)表1變化電機(jī)轉(zhuǎn)速,由于四個(gè)電機(jī)轉(zhuǎn)速不同,使其與水平面
2016-01-15 16:42:28
的扭矩(即鎖尾),而四旋翼飛行器對(duì)角螺旋槳采用正反槳設(shè)計(jì),從而不需要額外的機(jī)構(gòu)進(jìn)行“鎖尾”。如圖 1.1所示,4個(gè)螺旋槳呈十字形對(duì)稱(chēng)分布,1和2 號(hào)槳逆時(shí)針轉(zhuǎn)動(dòng),而3和4號(hào)槳順時(shí)針轉(zhuǎn)動(dòng),但4個(gè)螺旋槳
2015-10-23 11:21:59
四旋翼飛行器 (1)飛行器能夠根據(jù)起飛前預(yù)置的指令起飛,飛離地面高度應(yīng)超過(guò)cm,飛行距離(水平)應(yīng)超過(guò) xm,然后飛行器應(yīng)能平穩(wěn)降落 (2)飛行器能夠根據(jù)指定(鍵盤(pán)設(shè)定)的飛行高度及降落地點(diǎn)(方向
2016-06-06 13:13:48
本文將詳細(xì)展示如何在Matlab中建立四旋翼飛行模型,能正確對(duì)飛行器在力和力矩作下的線運(yùn)動(dòng)、角運(yùn)動(dòng)進(jìn)行6DOF仿真。
2021-09-15 07:46:14
。在這個(gè)測(cè)試中,我們?cè)O(shè)計(jì)了相位陣列來(lái)辨識(shí)飛行于120米高度的飛機(jī)上兩個(gè)相距4米的1kHz音頻信號(hào)。這個(gè)相控陣列包含了99個(gè)麥克風(fēng),分布在一個(gè)直徑30米的圓形區(qū)域上。 飛行中的噪聲源定位測(cè)試必須包括飛機(jī)
2019-04-03 09:40:03
停止飛行。風(fēng)會(huì)議導(dǎo)致工業(yè)無(wú)人機(jī)的速度和姿態(tài)變化太大,導(dǎo)致從空中拍攝照片出現(xiàn)扭曲,模糊。同時(shí)也會(huì)使得工業(yè)無(wú)人機(jī)的飛行動(dòng)能消耗加大,使飛行時(shí)間短,出現(xiàn)有效時(shí)間不能計(jì)劃區(qū)域的工作。 相機(jī)本身因素主要取決于
2020-12-07 15:15:11
器的基本技術(shù)指標(biāo)包括:飛行器最大尺寸不超過(guò)15 cm,重量10~100 g,有效載荷1~18 g,續(xù)航時(shí)間20~60 min,巡航速度30~60 km/h,飛行距離1~10km
2021-09-13 08:29:01
明,在理想的飛行條件以及沒(méi)有額外有效載荷的情況下,市場(chǎng)上近50%的無(wú)人機(jī)電池壽命小于30分鐘,35%的飛行時(shí)間在31到60分鐘的之間,剩余15%可以飛行超過(guò)1小時(shí)。 TI所提供的兩個(gè)全新無(wú)人機(jī)參考設(shè)計(jì)也許
2019-03-26 06:45:11
系統(tǒng)分成控制模塊和執(zhí)行模塊。控制模塊是一個(gè)遙控器,安芯一號(hào)作為主控芯片。按鍵來(lái)控制飛行器的運(yùn)動(dòng),包括懸空,上升,下降,水平4個(gè)方向的運(yùn)動(dòng)。單片機(jī)直接與無(wú)線串口模塊進(jìn)行通信,把指令直接通過(guò)串口拋數(shù)據(jù)給
2013-11-03 23:25:05
推進(jìn)客機(jī),從地球一端到另一端所需要的時(shí)間不到一小時(shí)。美國(guó)航空航天系統(tǒng)、以及先進(jìn)推進(jìn)領(lǐng)【關(guān)鍵詞】:光動(dòng)力飛行器,激光推進(jìn),航空航天系統(tǒng),高能激光,正在進(jìn)行,動(dòng)力驅(qū)動(dòng),實(shí)驗(yàn)室,科學(xué)家,激光驅(qū)動(dòng),化學(xué)推進(jìn)
2010-04-22 11:35:49
飛行器在繞X軸方向上產(chǎn)生轉(zhuǎn)矩,從而產(chǎn)生Roll運(yùn)動(dòng),并連帶產(chǎn)生Y方向上的運(yùn)動(dòng)。同理,1號(hào)電機(jī)加速,3號(hào)電機(jī)減速,飛行器則會(huì)產(chǎn)生Pitch運(yùn)動(dòng)和X方向上的運(yùn)動(dòng),如圖(B)。電機(jī)1號(hào)、3號(hào)與電機(jī)2號(hào)、4號(hào)
2019-08-06 17:12:20
時(shí),飛行器便保持懸停狀態(tài)。保證四個(gè)旋翼轉(zhuǎn)速同步增加或減小是垂直運(yùn)動(dòng)的關(guān)鍵。(2)俯仰運(yùn)動(dòng):在圖(b)中,電機(jī)1的轉(zhuǎn)速上升,電機(jī)3的轉(zhuǎn)速下降,電機(jī)2、電機(jī)4的轉(zhuǎn)速保持不變。為了不因?yàn)樾磙D(zhuǎn)速的改變引起四旋翼
2016-08-06 15:19:13
載體,以LabWindows/CVI為開(kāi)發(fā)環(huán)境,主要面向?qū)W生演示飛機(jī)的飛行的姿態(tài)(縱向、升降、傾向、俯仰、橫滾和航向)以及飛行過(guò)程中各種儀器儀表的變化,使學(xué)生對(duì)飛機(jī)的飛行原理以及駕駛技術(shù)具有一定了解,使其在模擬器上完成簡(jiǎn)單的飛行操作。
2019-07-12 07:37:38
本帖最后由 南中南 于 2015-12-31 11:01 編輯
四軸飛行器組合導(dǎo)航非線性濾波算法基于展卡爾曼濾波和不敏卡爾曼濾在四軸飛行器中的數(shù)學(xué)模型,研究擴(kuò)展卡爾曼濾波( Extended
2015-12-31 10:53:54
拉平后,飛機(jī)速度仍然較大,不能立即接地.需要在離地0.5~1米高度上繼續(xù)減小速度,這個(gè)拉平后繼續(xù)減小速度的過(guò)程,就是平飄。在這個(gè)過(guò)程中,隨著飛行速度的不斷減小,飛行員不斷后拉駕駛桿以保持升力等于重力。在
2010-02-24 10:59:56
。如果能夠獲得各個(gè)離子的到達(dá)時(shí)間,質(zhì)譜儀就能將不同質(zhì)量的離子根據(jù)飛行時(shí)間的不同而分開(kāi)。面臨問(wèn)題當(dāng)離子檢測(cè)器接收到一個(gè)離子時(shí),在到達(dá)板上產(chǎn)生一個(gè)負(fù)脈沖信號(hào),于是一次檢測(cè)便產(chǎn)生一連串的脈沖信號(hào)。在以往采用
2016-03-02 16:06:15
快速氣相色譜—飛行時(shí)間質(zhì)譜聯(lián)用儀產(chǎn)品說(shuō)明、技術(shù)參數(shù)及配置iTOFMS-2G是天瑞儀器子公司廈門(mén)質(zhì)譜公司精心打造的一款擁有超高性能的質(zhì)譜聯(lián)用儀,也是具有完全自主產(chǎn)權(quán)的商品化小型臺(tái)式電子轟擊離子源-飛行時(shí)間
2022-08-10 20:25:56
范圍測(cè)量功能的 VL53L4CX 飛行時(shí)間傳感器的應(yīng)用程序。 擴(kuò)展板隨附一個(gè)蓋玻片支架,您可以在其中安裝三個(gè)不同的墊片,在蓋玻片下方 0.25、0.5 和 1 毫米
2022-10-25 10:23:52
提出一種新型脈沖激光測(cè)距方法自觸發(fā)脈沖飛行時(shí)間激光測(cè)距方法。運(yùn)用該方法有效解決了傳統(tǒng)脈沖激光測(cè)距法中存在的提高測(cè)量精度和縮短測(cè)量時(shí)間兩者之間的矛盾。對(duì)該方法及本質(zhì)
2012-02-01 15:02:22 71
71 簡(jiǎn)單介紹四軸飛行器飛行原理,入門(mén)必須知道的知識(shí)
2015-11-11 17:03:310 2017年2月13日,北京訊—德州儀器(TI)近日推出了兩款基于電路的子系統(tǒng)參考設(shè)計(jì),可幫助制造商延長(zhǎng)四軸飛行器和其它非軍用消費(fèi)級(jí)和工業(yè)級(jí)無(wú)人機(jī)的飛行時(shí)間和電池續(xù)航時(shí)間,主要用于包裹運(yùn)送以及遠(yuǎn)程監(jiān)控、通信和協(xié)助。
2017-02-13 11:58:332143 通俗點(diǎn)說(shuō)就是擁有四個(gè)獨(dú)立動(dòng)力旋翼的飛行器,四軸飛行器是多軸飛行器其中的一種,常見(jiàn)的多軸飛行器有兩軸,三軸,四軸,六軸,八軸。
2018-03-28 09:39:0497775 飛行時(shí)間法(ToF)提供了非凡的3D視角,可望推動(dòng)新一代專(zhuān)用CMOS圖像傳感器的發(fā)展。
2018-04-02 09:33:4021823 
據(jù)麥姆斯咨詢(xún)報(bào)道,Espros創(chuàng)建了“飛行時(shí)間(ToF)學(xué)院”,對(duì)ToF和激光雷達(dá)(LiDAR)技術(shù)進(jìn)行培訓(xùn)。
2018-07-25 16:51:194806 如何延長(zhǎng)四輪車(chē)和工業(yè)無(wú)人機(jī)的飛行時(shí)間和電池壽命
2018-08-15 00:15:002297 空客公司的Zephyr S“高空偽衛(wèi)星”(HAPS)無(wú)人機(jī)打破了飛行器飛行時(shí)間紀(jì)錄,在沒(méi)有空中加油的情況下,連續(xù)飛行了14天22分鐘8秒。
2018-08-07 09:30:123577 據(jù)外媒報(bào)道,英國(guó)推出了首個(gè)飛行的士eVTOL。這個(gè)飛行的士由初創(chuàng)公司Vertical Aerospace生產(chǎn),可以像直升機(jī)一樣垂直起落,在高空中則可以像飛機(jī)一樣飛行。它是完全電動(dòng)的,飛行時(shí)速最高可達(dá)每小時(shí)80英里。
2018-09-19 14:32:004155 2018年度中國(guó)最具競(jìng)爭(zhēng)力傳感器產(chǎn)品| ams 1D飛行時(shí)間傳感器獨(dú)領(lǐng)風(fēng)騷
2019-07-02 15:25:162381 VL53L0X是飛行時(shí)間距離傳感器,與您使用過(guò)的其他傳感器不同!該傳感器包含一個(gè)很小的不可見(jiàn)激光源和一個(gè)匹配的傳感器。 VL53L0X可以檢測(cè)“飛行時(shí)間”,也可以檢測(cè)光線反射回傳感器所花費(fèi)的時(shí)間
2019-11-28 09:26:5212179 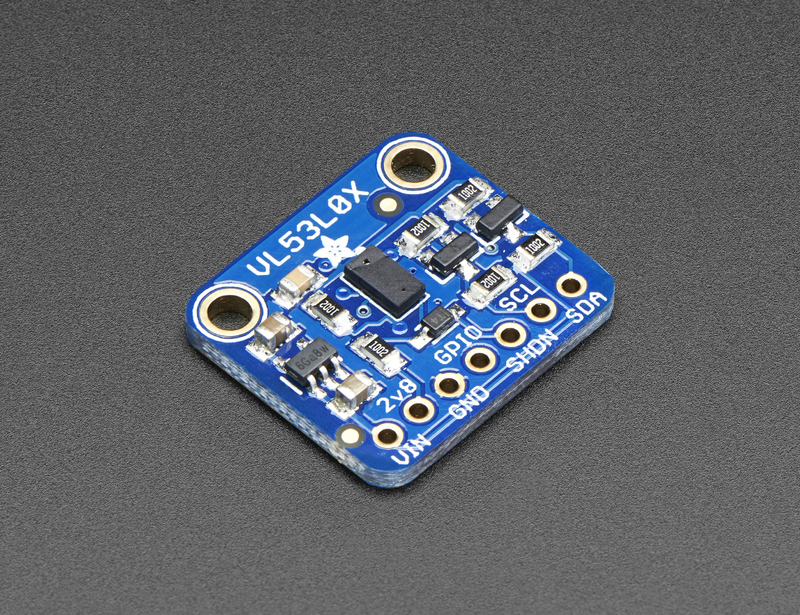
1月14日,據(jù)外媒最新報(bào)道,蘋(píng)果可能在iPad上首次應(yīng)用AR/VR,該設(shè)備或?qū)⒋钶d3D飛行時(shí)間后部傳感器,即ToF。雖然沒(méi)有具體指出是哪一個(gè),但結(jié)合之前泄露的消息,很有可能是即將發(fā)行的iPad Pro 2020。
2020-01-14 15:24:021265 YouTube頻道EverythingApplePro與知名泄密者M(jìn)ax Weinbach合作,揭示了iPhone 12相機(jī)的一些新功能。預(yù)計(jì)蘋(píng)果將在iPhone 12 Pro機(jī)型上保留三鏡頭傳感器,但這些手機(jī)還將配備飛行時(shí)間傳感器。
2020-03-06 09:33:152257 飛行時(shí)間傳感器測(cè)量物體穿過(guò)介質(zhì)傳播所需的時(shí)間。通常,是在發(fā)出波脈沖,從對(duì)象反射到返回到ToF傳感器之間經(jīng)過(guò)的時(shí)間的度量。
2020-04-12 17:31:004015 4月18日消息,據(jù)國(guó)外媒體報(bào)道,萬(wàn)眾矚目的太空探索公司SpaceX首次載人飛行時(shí)間終于敲定。
2020-04-19 09:55:341929 出貨量逾10億的飛行時(shí)間(ToF)解決方案全球領(lǐng)導(dǎo)者意法半導(dǎo)體,推出采用直方圖算法專(zhuān)利的新產(chǎn)品VL53L3CX,進(jìn)一步擴(kuò)大其FlightSense? ToF測(cè)距傳感器的產(chǎn)品范圍。
2020-05-27 09:44:223177 ,遙控信號(hào)丟失,而飛行器返航途中高度又不夠(P4的話在夜間飛行或者返航途中建筑物高度高于設(shè)置的最大限飛高度或者高于500米)。因此,在飛行時(shí),最好先看一下飛行的環(huán)境,若有高樓或者山,建議將返航高度設(shè)置高一些,P4有避障,但是飛行器無(wú)法避開(kāi)小的物體和晚上無(wú)法避開(kāi)以及無(wú)法避開(kāi)高于限飛高度的建筑物。 ?
2020-08-09 00:08:116600 什么是飛行時(shí)間相機(jī)?它是捕捉飛機(jī)飛行的相機(jī)嗎?它與飛機(jī)或飛機(jī)有關(guān)嗎?好吧,實(shí)際上距離還很遠(yuǎn)!
2020-11-03 15:05:302022 據(jù)央視報(bào)道,日前,在斯洛伐克的皮埃斯塔尼機(jī)場(chǎng),第五代飛行汽車(chē)完成了首次飛行。這輛飛行汽車(chē),可以在三分鐘內(nèi)從公路車(chē)輛變成飛機(jī)。它的行程范圍大約為 1000 公里,飛行速度高達(dá)每小時(shí) 200 公里。飛行
2020-11-09 13:00:372139 最高峰漢拿山山頂(1947米)運(yùn)送醫(yī)療AED。這項(xiàng)技術(shù)為拓展移動(dòng)機(jī)器人的活動(dòng)范圍及載荷能力鋪平了道路。 DMI無(wú)人機(jī)向維爾京群島運(yùn)送緊急醫(yī)療物資。氫燃料電池組可為無(wú)人機(jī)實(shí)現(xiàn)超過(guò) 2 個(gè)小時(shí)的飛行時(shí)間,比大多數(shù)電池供電無(wú)人機(jī)長(zhǎng) 4 倍
2021-01-13 10:49:002528 
,由Skyfront專(zhuān)有的燃油噴射油電混合動(dòng)力系統(tǒng)提供動(dòng)力,可將飛行時(shí)間延長(zhǎng)20倍。雖然標(biāo)準(zhǔn)的Perimeter 8具有超過(guò)5小時(shí)的無(wú)載荷
2021-03-25 16:52:212558 3D飛行時(shí)間,或3D ToF是一種無(wú)掃描儀LiDAR(光檢測(cè)和測(cè)距)技術(shù),通過(guò)發(fā)射納秒級(jí)的高功率光脈沖來(lái)捕獲相關(guān)場(chǎng)景的深度信息(通常是短距離內(nèi))。飛行時(shí)間技術(shù)在深度測(cè)量和物體檢測(cè)的領(lǐng)域發(fā)揮
2021-11-09 17:15:271989 ??????? VL53L8直接飛行時(shí)間 (dToF) 傳感器非常適用于智能手機(jī)以及智能揚(yáng)聲器、人機(jī)界面、消費(fèi)類(lèi)激光雷達(dá)和AR/VR/MR
2022-06-16 09:05:201711 TMF8821 是真正的直接飛行時(shí)間傳感器和處理系統(tǒng),其將 940nm 垂直腔面發(fā)射激光器 (VCSEL)、高靈敏度單光子雪崩二極管 (SPAD) 陣列、精密時(shí)間數(shù)字轉(zhuǎn)換器 (TDC) 和低功耗微控制器子系統(tǒng)集成到一個(gè)模塊化封裝中
2022-07-22 14:53:163029 Analog Devices (ADI) 和 Microsoft 聯(lián)手生產(chǎn)飛行時(shí)間 (ToF) 3D 成像解決方案,目標(biāo)是在任何場(chǎng)景條件下都提供更高的精度。ADI 將利用 Microsoft
2022-07-27 08:02:54728 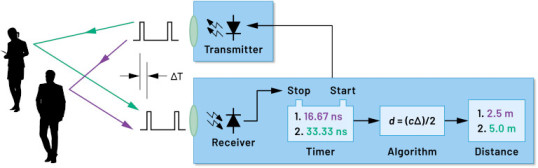
市場(chǎng)分析公司 Technavio 最近表示,預(yù)計(jì)未來(lái)幾年系留無(wú)人機(jī)和無(wú)人機(jī)市場(chǎng)將增長(zhǎng) 70% 以上。 無(wú)人機(jī)制造公司 Flyfocus 改進(jìn)了其系留無(wú)人機(jī)的飛行時(shí)間、有效載荷和安全性 。 系留無(wú)人機(jī)
2022-08-03 09:52:25769 
使用基于 SiPM 的 Gen1 LiDAR 演示器進(jìn)行直接飛行時(shí)間測(cè)距
2022-11-15 20:11:030 飛行時(shí)間(ToF)為此變得越來(lái)越重要。使用ToF技術(shù),光從調(diào)制源(例如激光)發(fā)射,然后由傳感器或相機(jī)捕獲從一個(gè)或多個(gè)物體反射的光束。因此,可以通過(guò)發(fā)射光和接收反射光之間的時(shí)間延遲?來(lái)確定距離
2022-11-22 14:17:31504 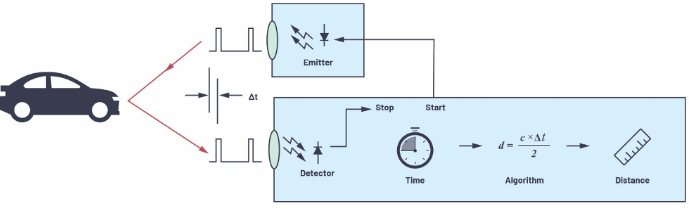
UM2812_用于X_CUBE_53L3A2飛行時(shí)間測(cè)距傳感器擴(kuò)展包用戶(hù)手冊(cè)
2022-11-22 19:17:150 UM2813_用于X_CUBE_53L1A2飛行時(shí)間測(cè)距傳感器擴(kuò)展包用戶(hù)手冊(cè)
2022-11-22 19:17:311 光學(xué)器件在飛行時(shí)間(ToF)深度傳感相機(jī)中起著關(guān)鍵作用,光學(xué)設(shè)計(jì)決定了最終系統(tǒng)及其性能的復(fù)雜性和可行性。3D ToF相機(jī)具有某些獨(dú)特的特性1這推動(dòng)了特殊的光學(xué)要求。本文介紹了深度傳感光學(xué)系統(tǒng)架構(gòu)
2022-12-09 15:37:131160 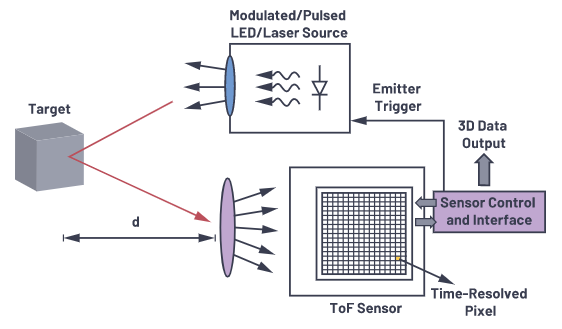
飛行時(shí)間(ToF)為此變得越來(lái)越重要。使用ToF技術(shù),光從調(diào)制源(例如激光)發(fā)射,然后由傳感器或相機(jī)捕獲從一個(gè)或多個(gè)物體反射的光束。因此,可以通過(guò)發(fā)射光和接收反射光之間的時(shí)間延遲?來(lái)確定距離
2022-12-09 15:41:07707 
這是我們飛行時(shí)間(ToF)系列的第一篇文章,將概述連續(xù)波(CW)CMOS ToF相機(jī)系統(tǒng)技術(shù)及其相對(duì)于機(jī)器視覺(jué)應(yīng)用傳統(tǒng)3D成像解決方案的優(yōu)勢(shì)。后續(xù)文章將深入探討本文介紹的一些系統(tǒng)級(jí)組件,包括照明子系統(tǒng)、光學(xué)器件、電源管理和深度處理。
2022-12-09 15:46:40670 
光學(xué)器件在飛行時(shí)間(ToF)深度傳感相機(jī)中起著關(guān)鍵作用,光學(xué)設(shè)計(jì)決定了最終系統(tǒng)及其性能的復(fù)雜性和可行性。3D ToF相機(jī)具有某些獨(dú)特的特性1這推動(dòng)了特殊的光學(xué)要求。本文介紹了深度傳感光學(xué)系統(tǒng)架構(gòu)
2022-12-15 14:19:12931 如何避免運(yùn)動(dòng)偽影的出現(xiàn)?Teledyne e2v公司結(jié)合多年的視覺(jué)成像經(jīng)驗(yàn)創(chuàng)新推出Hydra3D+飛行時(shí)間(ToF)傳感器,其像素分辨率為832 x 600,采用Teledyne e2v專(zhuān)有的CMOS技術(shù),具有全新的 10 μm three-tap 像素,相較于上一代Hydra3D飛行時(shí)間傳感器
2023-04-27 16:00:06646 
產(chǎn)品特點(diǎn) 較好的分析效果; 精細(xì)測(cè)量; 較快和雙極性解決方案; 較大化質(zhì)量分辨率。 下面介紹幾款飛行時(shí)間探測(cè)器 相關(guān)應(yīng)用 審核編輯?黃宇
2023-05-08 07:16:04255 
飛行時(shí)間,DTOF激光雷達(dá)大量適用送餐機(jī)器人,服務(wù)機(jī)器人,清潔機(jī)器人,無(wú)人叉車(chē),AGV小車(chē)等場(chǎng)景
2022-01-19 14:18:47567 
電子發(fā)燒友網(wǎng)站提供《Arduino和VL53L0X飛行時(shí)間+OLED顯示教程.zip》資料免費(fèi)下載
2023-07-03 09:37:442 電子發(fā)燒友網(wǎng)站提供《飛行時(shí)間傳感器和全局快門(mén)傳感器賦能消費(fèi)電子新功能.pdf》資料免費(fèi)下載
2023-07-31 09:58:210 電子發(fā)燒友網(wǎng)站提供《用于工業(yè)應(yīng)用的成像傳感器(包括飛行時(shí)間、環(huán)境光和相機(jī)傳感器).pdf》資料免費(fèi)下載
2023-07-31 16:22:452 電子發(fā)燒友網(wǎng)為你提供ADI(ADI)ADSD3030:VGA、CMOS、飛行時(shí)間、后側(cè)光照傳感器數(shù)據(jù)表相關(guān)產(chǎn)品參數(shù)、數(shù)據(jù)手冊(cè),更有ADSD3030:VGA、CMOS、飛行時(shí)間、后側(cè)光照傳感器數(shù)據(jù)表
2023-10-07 17:45:47

電子發(fā)燒友網(wǎng)為你提供ADI(ADI)ADSD3100:1 MP, CMOS, 飛行時(shí)間, 后側(cè)光照傳感器數(shù)據(jù)表相關(guān)產(chǎn)品參數(shù)、數(shù)據(jù)手冊(cè),更有ADSD3100:1 MP, CMOS, 飛行時(shí)間
2023-10-10 18:35:25
硅光電倍增管用于直接飛行時(shí)間測(cè)距應(yīng)用(一):直接ToF測(cè)距系統(tǒng)的設(shè)計(jì)
2023-12-07 10:23:12268 
據(jù)麥姆斯咨詢(xún)介紹,意法半導(dǎo)體的最新一代8 x 8多區(qū)飛行時(shí)間(ToF)測(cè)距傳感器VL53L8CX實(shí)現(xiàn)了一系列改進(jìn),包括更強(qiáng)的抗環(huán)境光干擾能力、更低的功耗和更強(qiáng)的光學(xué)性能。
2023-12-27 09:23:24590 
如果你對(duì)飛行時(shí)間不了解,別擔(dān)心,你來(lái)對(duì)地方了。飛行時(shí)間一詞幾乎就是字面意思,只不過(guò)飛行的對(duì)象是波長(zhǎng)為940納米,肉眼完全不可見(jiàn)的“光子”。我們發(fā)出一束激光;光子撞擊某個(gè)物體并反彈回來(lái)。當(dāng)光子反彈
2024-02-19 12:23:33288 
???????? VL53L5、VL53L7、VL53L8都是基于ST的FlightSense技術(shù)的多區(qū)飛行時(shí)間(ToF)傳感器。
2024-02-25 09:41:20191 
VL53L5、VL53L7、VL53L8都是基于意法半導(dǎo)體(ST)的FlightSense技術(shù)的多區(qū)飛行時(shí)間(ToF)傳感器。
2024-02-28 09:53:46219 
在直接飛行時(shí)間(dToF)傳感器領(lǐng)域處于前沿地位,二十億顆FlightSense? dToF傳感器產(chǎn)品銷(xiāo)量,意法半導(dǎo)體再次發(fā)力,針對(duì)相機(jī)輔助功能、增強(qiáng)現(xiàn)實(shí)(AR)/虛擬現(xiàn)實(shí)(VR)、3D網(wǎng)絡(luò)攝像頭、機(jī)器人、智能建筑等重點(diǎn)目標(biāo)應(yīng)用,推出直接飛行時(shí)間和間接飛行時(shí)間(iToF)傳感器;
2024-03-06 09:34:28160
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論