時至今日,汽車防碰撞系統(tǒng)和實驗性質(zhì)的無人駕駛汽車依靠的是雷達(dá)等傳感器來檢測路上的行人。
2016-02-17 09:36:32 2859
2859 Google 無人駕駛汽車還在測試中,一份新的專利文件顯示,Google 找到了無人汽車撞車后,保護(hù)行人的辦法,那就是把行人黏在車前蓋和保險杠上,防止行人遭受二次撞擊。
2016-05-20 09:08:39987 
我司提供行人檢測/人體檢測/人體抓拍海思解決方案,同時還有ARM行人檢測攝像機(jī)方案。人體檢測自動識別攝像機(jī)基于視頻圖像智能分析技術(shù)原理研制,采用公司自主研發(fā)的人體輪廓識別技術(shù),綜合識別人體頭部、肩部
2018-06-14 11:29:46
前面人臉檢測的基礎(chǔ)上,進(jìn)一步教大家如何使用createFisherFaceRecognizer在dragonbaord 410c開發(fā)板上來進(jìn)行人臉識別,今天將重點(diǎn)介紹該方法的原理和調(diào)用方法,處理中只是
2018-09-21 10:53:31
HyperWorks在汽車與行人腿部碰撞仿真中的應(yīng)用是什么?
2021-05-11 06:10:15
MATLAB的行人目標(biāo)檢測的方法有哪些,就是主要的方法,基于背景的,基于目標(biāo)的,還有其他的。都有哪些?
2023-08-23 16:30:20
網(wǎng)上的教程都是在人臉上加個框框,進(jìn)行人臉識別,而不是進(jìn)行人臉檢測。請問有誰嘗試過和face++進(jìn)行交互,能夠識別攝像頭前的人是預(yù)存的人,嗯,類似于人臉開密碼箱那種的。但是又想加上一部檢測到運(yùn)行拍照發(fā)郵件那個?
2020-06-10 09:28:11
申請理由:本人目前在讀研究生,有較多的精力完成產(chǎn)品試用及撰寫報告;本人擅長linux嵌入式領(lǐng)域,熟悉linux應(yīng)用開發(fā),網(wǎng)絡(luò)編程,關(guān)注物聯(lián)網(wǎng),嵌入式技術(shù)等;目前正在研究模式識別,準(zhǔn)備制作一個應(yīng)用于安
2015-12-18 14:34:30
是基礎(chǔ) 目前,安防系統(tǒng)中人臉識別系統(tǒng)主要是基于對監(jiān)控視頻內(nèi)的動態(tài)的人臉進(jìn)行檢測、識別、報警、查詢的系統(tǒng),一般其包含了:人臉采集服務(wù)模塊、人臉實時識別服務(wù)模塊、人臉檢索服務(wù)模塊、應(yīng)用服務(wù)模塊。能夠在實時
2018-11-07 10:38:18
主流技術(shù)。尤其值得注意的是,目前人臉識別可以對被識別者在中遠(yuǎn)距離進(jìn)行隱蔽操作,這在智能安防和平安城市領(lǐng)域有著重要的應(yīng)用價值。安防中的人臉識別目前安防領(lǐng)域中人臉識別技術(shù)主要有兩種類型的應(yīng)用:靜態(tài)人臉比對
2019-06-28 11:42:20
現(xiàn)狀伴隨著智慧城市的建設(shè)進(jìn)程加快,各種安防設(shè)備和技術(shù)手段隨處可見,特別是人臉技術(shù)法展迅速。比較以往的行業(yè)應(yīng)用來說,智能分析識別從后臺報警慢慢像前臺認(rèn)證發(fā)展,用直接、暴露、簡單的結(jié)果進(jìn)行預(yù)警展示,這種
2017-07-28 13:57:28
節(jié)點(diǎn)。由于要進(jìn)行人體識別,攝像頭的視野范圍也很重要。要能保證在合適的追蹤距離下攝像頭能夠比較完整的看到追蹤目標(biāo)。對于小強(qiáng)用戶,把攝像頭固定在二層上,同時有一定的仰角就可以了。注意圖像的分辨率
2021-05-16 19:11:34
在嵌入式開發(fā)板上如何用opencv調(diào)用caffe模型進(jìn)行人臉識別并截圖呢?其代碼該如何去實現(xiàn)呢?
2021-12-27 06:56:49
主要開發(fā)出兩種很有前景的室內(nèi)環(huán)境行人導(dǎo)航方法,一種在參考文獻(xiàn)[1]論述的基于零速率更新的INS-EKF-ZUPT (IEZ)慣導(dǎo)方法,另一種是包括步伐檢測、步長估算和航向算法的基于人類步行動力學(xué)的慣導(dǎo)
2018-11-07 16:14:34
本文將通過基于專業(yè)熱設(shè)計軟件TAITherm進(jìn)行人體熱舒適性分析的案例對上述問題給出答案。
2021-01-14 06:31:11
【作者】:謝堯芳;蘇松志;李紹滋;【來源】:《廈門大學(xué)學(xué)報(自然科學(xué)版)》2010年02期【摘要】:行人檢測是計算機(jī)視覺領(lǐng)域中的研究熱點(diǎn),其實質(zhì)是一個二分類問題.目前基于統(tǒng)計的行人檢測技術(shù)已取得了
2010-04-24 09:48:05
怎樣采用LBP特征進(jìn)行人臉檢測與人臉識別呢?如何利用Haar Cascade特征檢測器來實現(xiàn)人臉檢測呢?
2022-02-28 08:20:56
如題,公司使用的開發(fā)板是imx6q-c_v1.3,內(nèi)核是linux-3.0.35,公司領(lǐng)導(dǎo)要求在板子上實現(xiàn)攝像頭在線的行人跟蹤檢測功能,我已經(jīng)移植了opencv到開發(fā)板上運(yùn)行,發(fā)現(xiàn)opencv自帶
2022-01-10 07:18:03
如何對RK3399的HDMI進(jìn)行人臉識別呢?如何對識別結(jié)果進(jìn)行模糊化處理呢?
2022-03-07 12:48:06
你好!想買個ADAS的開發(fā)板,完成功能有LDW, FCW 行人檢測 車距監(jiān)控 等,芯片是BF609,那么開發(fā)板的型號是啥?
2018-07-31 07:09:20
=339699&page=1#pid2608768現(xiàn)在移植到dsp上進(jìn)行人檢測實驗。重新訓(xùn)練基于彩色圖像的行人檢測分類器。速度還有待優(yōu)化截圖如下:后期繼續(xù)做速度優(yōu)化。`
2014-06-27 22:44:05
兩部分。1.防登船系統(tǒng)2.駕乘人員保護(hù)系統(tǒng)1.防登船系統(tǒng):該系統(tǒng)主要負(fù)責(zé)對行駛中船舶四周進(jìn)行警戒防御,系統(tǒng)采用多重近距離雷達(dá)疊加識別技術(shù),同時采取智能軟件分析判斷對采集信號進(jìn)行處理,進(jìn)而對船舶附近區(qū)域
2009-11-09 09:42:00
在檢測道路行駛過程中的車輛或行人的存在或者行為狀態(tài)所用到的感應(yīng)器件
2019-06-08 10:33:41
如題,本人dsp新人菜鳥一枚,要做雙目攝像頭進(jìn)行人臉識別以及一些其他的功能,該用什么dsp芯片???DM642可行不??DM6437呢??望各位指導(dǎo)!!
2016-09-02 09:58:14
,越來越受到國內(nèi)外研究機(jī)構(gòu)的重視。在混合交通環(huán)境下,行人檢測通過圖像處理、計算機(jī)視覺相關(guān)算法以及機(jī)器學(xué)習(xí)等技術(shù)對道路行人進(jìn)行識別和追蹤,在智能汽車、自動導(dǎo)航、運(yùn)動分析等領(lǐng)域行人檢測對安全輔助駕駛有著
2018-12-12 15:24:03
EVP-6100演示視頻 行人檢測系統(tǒng)
視頻教程
2010-11-18 16:21:48 43
43 1 概述
交通事故傷害中,約65%為易受傷害的道路使用者。行人作為道路使用者中的弱勢群體,屬于交通事故中的高危人群,死亡率極高。車輛與行人碰撞事故中,人體的損傷
2010-07-27 09:42:29956 
為提高城市交通環(huán)境下車輛主動安全性,保障行人安全,提出了基于車載視覺傳感器的行人保護(hù)方法。利用Adaboost 算法實現(xiàn)行人的快速檢測,結(jié)合Kalman 濾波原理跟蹤行人,以獲取其運(yùn)行
2012-03-29 17:46:292965 
基于行人下肢防護(hù)的前保險杠改進(jìn)分析_王丙雨
2017-03-16 15:02:170 基于Codebook背景建模的視頻行人檢測_黃成都
2017-03-19 11:41:390 基于PDR_UWB緊耦合的足綁式行人導(dǎo)航技術(shù)_孫璧文
2017-03-19 11:41:230 行人慣性導(dǎo)航零速檢測算法_費(fèi)程羽
2017-03-19 19:07:044 阿里技術(shù)導(dǎo)讀:Shape Detection API 的發(fā)布已經(jīng)有一些時日,其主要提供的能力是給予前端直接可用的特征檢測接口(包括條形碼、人臉、文本檢測)。本文將簡單對其進(jìn)行介紹,對前端進(jìn)行人臉檢測
2017-09-22 17:38:500 行人檢測如今已經(jīng)應(yīng)用到生活的多個領(lǐng)域,如智能監(jiān)控、無人駕駛和智能相機(jī)等。自hog提出行人檢測這一思想,到如今已經(jīng)有約有數(shù)千種方法。現(xiàn)有的行人檢測方法大致可以分成三大類:DPM變體、深度網(wǎng)絡(luò)和決策森林
2017-11-05 10:43:385 基于提高紅外圖像行人檢測準(zhǔn)確率的目的,提出了一種基于多特征的紅外行人檢測算法。首先提取訓(xùn)練樣本的梯度方向直方圖特征和強(qiáng)度自相似性特征,利用二者相結(jié)合得到聯(lián)合特征訓(xùn)練支持向量機(jī)(SVM),之后利用滑動
2017-11-08 15:05:3614 在行人檢測中,由于外界環(huán)境復(fù)雜變化和行人自身的不同特點(diǎn),往往會造成錯誤檢測以及遺漏檢測。針對以上問題,文中提出一種基于圖塊和二階統(tǒng)計特征的方法,提高檢測的準(zhǔn)確率。首先利用基于圖塊的幀差法進(jìn)行前景檢測
2017-11-14 10:44:5513 對圖像和視頻中的不同類別的對象的檢測是計算機(jī)視覺研究的基本任務(wù)。行人檢測是一個熱門的研究課題。行人是交通系統(tǒng)中的主要參與者,所以對視頻監(jiān)控系統(tǒng)中的行人檢測對智能交通系統(tǒng)的研究和應(yīng)用有著重要的意義
2017-11-15 10:51:5611 檢測算法相融合,提高行人外觀特征提取的準(zhǔn)確性;然后,提出自適應(yīng)顯著特征選擇方法,有效地提取行人特征描述;最后,通過動態(tài)加權(quán)平均排名模型將多特征融合。實驗表明,所提出的方法提高了行人識別的準(zhǔn)確性,同時對姿態(tài)的變化具有較
2017-11-21 16:18:082 針對復(fù)雜環(huán)境中的行人檢測問題,提出了一種有效的基于分層稀疏編碼的圖像表示方法。首先通過兩層稀疏編碼模型結(jié)合基于KSVD的深度學(xué)習(xí)算法來獲得圖像的稀疏表示,對圖像塊及同一區(qū)域的高階依賴關(guān)系進(jìn)行了建模
2017-11-24 10:24:060 針對在復(fù)雜場景下,聚合通道特征(ACF)的行人檢測算法存在檢測精度較低、誤檢率較高的問題,提出一種結(jié)合紋理和輪廓特征的多通道行人檢測算法。算法由訓(xùn)練分類器和檢測兩部分組成。在訓(xùn)練階段,首先提取ACF
2017-11-27 10:25:160 針對可變形部件模型(DPM)算法在行人檢測領(lǐng)域中的檢測精度高,但由于在特征提取和行人定位兩步中的計算量過大,導(dǎo)致檢測速度過慢而不能應(yīng)用于實時行人檢測的問題,提出了一種融合分支定界算法和級聯(lián)檢測
2017-11-30 15:52:080 行人重識別精度主要取決于特征描述和度量學(xué)習(xí)兩個方面。在特征描述方面,現(xiàn)有特征難以解決行人圖像視角變化的問題,因此考慮將顏色標(biāo)簽特征與顏色和紋理特征融合,并通過區(qū)域和塊劃分的方式提取直方圖獲得圖像特征
2017-12-13 17:25:430 路徑選擇是人們?nèi)粘I钪蓄l繁遭遇的現(xiàn)實問題。針對在行人導(dǎo)航系統(tǒng)的輔助下,行人仍然需要通過主觀判斷識別路徑指示信息中的地標(biāo)和真實地標(biāo)是否匹配的問題,建立了顧及主觀判斷延誤的行人道路網(wǎng)絡(luò)模型。通過將主觀
2017-12-21 17:02:540 在分析、比較現(xiàn)有疏散仿真模型的基礎(chǔ)上,提出一種基于正六邊形元胞自動機(jī)的行人疏散模型。該模型中疏散空間被分成相等的正六邊形,每個行人有包括靜止在內(nèi)的7個運(yùn)動方向。給出速度等級的概念用來描述行人的疏散
2018-01-31 16:02:350 激光數(shù)據(jù)的快速聚類,完成環(huán)境分割,給出基于類簇到激光雷達(dá)的距離及行人身體寬度的行人識別方法,并將行人簇的位置作為初始跟蹤位置,將激光數(shù)據(jù)圖形化顯示,激光數(shù)據(jù)轉(zhuǎn)換成視頻數(shù)據(jù),利用粒子濾波算法實現(xiàn)行人跟蹤并實時繪制軌跡
2018-02-05 15:33:330 MEMS傳感器和高性能的行人航位推算算法。本文主要討論各種行人航位推算算法上需要用到的傳感器組件的數(shù)學(xué)表述,以及可用性和可靠性更高的PDR行人航位推算算法的測試結(jié)果。定位技術(shù)概述全球?qū)Ш叫l(wèi)星系統(tǒng)。
2018-03-15 16:02:175153 
為解決非重疊視域監(jiān)控系統(tǒng)中的目標(biāo)匹配問題,提出一種基于行人主顏色統(tǒng)計信息和空間分布信息的特征提取模型。使用最近鄰聚類法對HSV顏色空間的目標(biāo)進(jìn)行聚類,得到行人主顏色分布特征,在此基礎(chǔ)上,對行人各個
2018-03-20 10:00:531 針對非重疊視角下的行人重識別和高維特征提取等問題,提出基于塊稀疏表示的行人重識別方法。采取典型相關(guān)分析( CCA)方法進(jìn)行特征投影變換,通過提高特征匹配能力來避免高維特征運(yùn)算引起的維數(shù)災(zāi)難問題,并在
2018-03-29 14:57:480 早期的算法使用了圖像處理,模式識別中的一些簡單方法,準(zhǔn)確率低。隨著訓(xùn)練樣本規(guī)模的增大,如INRIA數(shù)據(jù)庫、Caltech數(shù)據(jù)庫和TUD行人數(shù)據(jù)庫等的出現(xiàn),出現(xiàn)了精度越來越高的算法,另一方面,算法
2018-06-04 11:28:328884 目前OpenCV中的行人檢測算法支持HOG+SVM以及HOG+Cascade兩種,二者都采用了滑動窗口技術(shù),用固定大小的窗口掃描整個圖像,然后對每一個窗口進(jìn)行前景和背景的二分類。為了檢測不同大小的行人,還需要對圖像進(jìn)行縮放。
2018-08-03 11:27:424104 行人是城市交通系統(tǒng)的主要參與者,保障行人安全和減少其對機(jī)動車的干擾是城市交通系統(tǒng)建設(shè)的重要目標(biāo),因此對行人交通的研究也越來越受到重視。行人交通研究的主要問題包括行人檢測、目標(biāo)跟蹤和行為分析。基于視頻
2019-07-29 08:06:002092 
針對非重疊 多攝像頭下的行人重識別( Re-ID)易受到光照、姿勢及遮擋等影響和實驗過程中存在圖像錯誤匹配的情況,提出一種基于孿生網(wǎng)絡(luò)和重排序的行人重識別方法。首先,給定一對行人訓(xùn)練圖像,李生網(wǎng)絡(luò)
2018-11-22 17:06:003 行人檢測是當(dāng)前機(jī)器視覺領(lǐng)域的挑戰(zhàn)性課題之一。為了提高行人檢測效率,提出一種基于優(yōu)化圖的半監(jiān)督學(xué)習(xí)的行人檢測算法。首先,提取每幅圖像的形狀上下文特征,并采用選擇性搜索提取出行人候選區(qū)域建議框;然后
2018-12-21 17:23:065 隨著機(jī)動車禮讓行人規(guī)定的貫徹實施,提高了行人過街的安全性,但同時也在一定程度上增加了路段追尾事故發(fā)生率,并降低了城市路段的通行效率。針對以上問題,本文設(shè)計了城市路段行人過街輔助系統(tǒng)。利用紅外檢測裝置
2019-03-01 09:17:398 目前,人臉識別主要分為兩種,一是人臉識別,二是行人再識別,前者在技術(shù)上可以簡單理解為將兩張圖片放在一起,區(qū)分是否兩個人,而后者指的是是利用計算機(jī)視覺技術(shù)判斷圖像或者視頻序列中是否存在特定行人的技術(shù)。
2019-03-13 11:00:331273 目前,人臉識別主要分為兩種,一是人臉識別,二是行人再識別,前者在技術(shù)上可以簡單理解為將兩張圖片放在一起,區(qū)分是否兩個人,而后者指的是是利用計算機(jī)視覺技術(shù)判斷圖像或者視頻序列中是否存在特定行人的技術(shù)。
2019-03-22 09:52:103256 針對復(fù)雜環(huán)境下行人檢測不能同時滿足高召回率與高效率檢測的問題,提出一種基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的行人檢測方法。首先,采用CNN中的單步檢測升級版網(wǎng)絡(luò)YOL0v2 初步檢測行人;然后,設(shè)計一個網(wǎng)絡(luò)
2019-04-12 17:30:566 行人再識別起源于多攝像頭跟蹤,指在非重疊視角域多攝像頭網(wǎng)絡(luò)下進(jìn)行的行人匹配,即確認(rèn)不同位置的攝像頭在不同的時刻拍攝到的行人目標(biāo)是否為同一人。
2019-07-09 11:00:503412 大華股份AI行人重識別技術(shù),繼2018年取得公開數(shù)據(jù)集排名和PRCV2018大規(guī)模行人檢索競賽第一之后,近日再次取得新突破:在三大國際權(quán)威公開數(shù)據(jù)集Market1501、DukeMTMC-reid
2019-07-13 10:23:363744 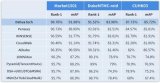
模塊系統(tǒng),自動遮擋住大燈組內(nèi)相應(yīng)區(qū)域的燈光,還能隨著車輛的移動,及時掃描本車與前車距離,直到會車或超車結(jié)束為止。沃爾沃同時考慮到路上的行人也會遭遇遠(yuǎn)光燈的“騷擾”,。FAHB全智能主動式遠(yuǎn)光燈能夠偵測到行人,并自動調(diào)整燈光的高度,讓燈光始終低于行人頭部,避免燈光直射行人眼部,從而保障行人安全。
2019-07-29 15:51:152167 在行人檢測技術(shù)方面,他們提出了基于目標(biāo)尺寸分級的級聯(lián)網(wǎng)絡(luò),并充分發(fā)揮感興趣區(qū)域的上下文信息,提升網(wǎng)絡(luò)特征提取的能力,以解決行人檢測問題中存在的目標(biāo)尺寸浮動大、遮擋、形變且定位不準(zhǔn)等問題;與此同時在目標(biāo)定位方面采用交叉熵正則約束來優(yōu)化邊框定位準(zhǔn)確度。
2019-08-08 11:55:052450 針對復(fù)雜環(huán)境下行人檢測不能同時滿足高召回率與高效率檢測的問題,提出一種基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的行人檢測方法。首先,采用CNN中的單步檢測升級版網(wǎng)絡(luò)YOLOv2初步檢測行人;然后,設(shè)計一個網(wǎng)絡(luò)
2019-11-05 16:15:157 、尺度變化、部分遮擋等不可控因素,行人車輛檢測仍然是一個很有挑戰(zhàn)性的問題,在精度上還有待提升,而且現(xiàn)有的方法模型復(fù)雜度普遍較高,速度上也無法滿足實際應(yīng)用的需求。本文對行人車輛檢測進(jìn)行了系統(tǒng)的分析和研究,改進(jìn)和
2019-11-22 17:17:3010 主要應(yīng)用領(lǐng)域的區(qū)別:“行人重識別”主要應(yīng)用于刑偵工作、圖像檢索等方面。“行人檢測”主要用于智能駕駛、輔助駕駛和智能監(jiān)控等相關(guān)領(lǐng)域。
2020-03-20 16:08:05474 本文檔的主要內(nèi)容詳細(xì)介紹的是使用Python和OpenCV實現(xiàn)行人檢測的資料合集免費(fèi)下載。
2020-06-01 17:42:4623 或刮擦,從而保護(hù)交通環(huán)境中的運(yùn)動行人安全,運(yùn)動行人檢測技術(shù)的研究開發(fā)將為我國車輛安全輔助駕駛技術(shù)的研究提供有力的理論和技術(shù)支持。
2020-07-30 17:53:005 行人重識別,又稱行人再識別,是利用 CV 技術(shù)判斷圖像或視頻序列中是否存在特定行人的技術(shù)。常規(guī)的行人重識別方法往往需要高昂的人工標(biāo)注成本,計算復(fù)雜度也很大。在本文中,中山大學(xué)研究者提出的弱監(jiān)督行人
2021-01-05 14:29:142197 
目標(biāo)檢測支持許多視覺任務(wù),如實例分割、姿態(tài)估計、跟蹤和動作識別,這些計算機(jī)視覺任務(wù)在監(jiān)控、自動駕駛和視覺答疑等領(lǐng)域有著廣泛的應(yīng)用。隨著這種廣泛的實際應(yīng)用,目標(biāo)檢測自然成為一個活躍的研究領(lǐng)域。 我們
2021-01-07 14:04:533120 針對基于局部特征的行人重識別方法在行人錯位和姿態(tài)變化時識別精度較低的問題,提出一種采用多任務(wù)金宇塔重疊匹配特征的重識別方法。在訓(xùn)練階段,使用改進(jìn)的 Rennes50作為主干網(wǎng)絡(luò)提取特征圖,將其切分
2021-03-11 16:05:5910 行人重識別是指利用計算機(jī)視覺技術(shù)識別不同監(jiān)控設(shè)備下的目標(biāo)行人,該技術(shù)在公共安全與相冊管理等方面應(yīng)用較廣。然而現(xiàn)有行人重識別算法在局部特征區(qū)域劃分后出現(xiàn)離異值使該區(qū)域內(nèi)容不一致,導(dǎo)致局部特征區(qū)分性降低
2021-03-21 10:49:055 行人是城市交通系統(tǒng)的主要參與者,保障行人安全和減少其對機(jī)動車的干擾是城市交通系統(tǒng)建設(shè)的重要目標(biāo),因此對行人交通的研究也越來越受到重視。行人交通研究的主要問題包括行人檢測、目標(biāo)跟蹤和行為分析。基于視頻
2021-03-29 11:47:122455 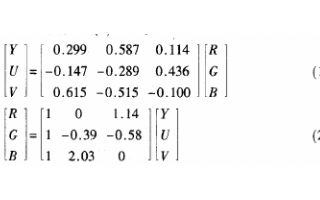
行人航位推算系統(tǒng)(PDR)因其無需部署信標(biāo)節(jié)點(diǎn)、成本低廉的特點(diǎn)被廣泛應(yīng)用于室內(nèi)定位中。圍繞基于行人航位推算
2021-05-05 00:17:002575 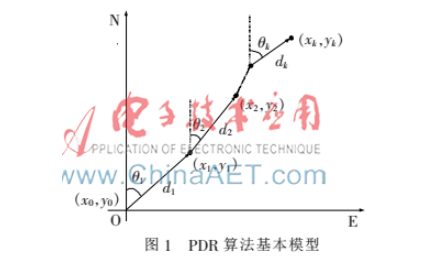
行人檢測是目標(biāo)檢測領(lǐng)域中重要的研究課題,其在智能駕駛系統(tǒng)、視頻監(jiān)控、人流量密度監(jiān)測等領(lǐng)域有廣泛應(yīng)用。但由于行人背景的復(fù)雜以及個體本身的差異,行人檢測成為目標(biāo)檢測領(lǐng)域的研究難點(diǎn)之一。
2021-05-02 09:55:003489 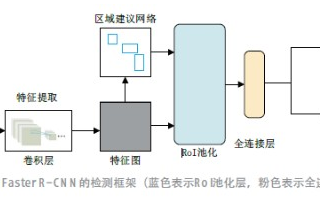
針對行人再識別過程中相同身份行人圖像顏色不一致,以及不同身份行人圖像顏色相近問題,提出一種基于雙分支殘差網(wǎng)絡(luò)的行人再識別方法。將RGB圖像和灰度圖像分別輸入預(yù)訓(xùn)練的 Resnet-50網(wǎng)絡(luò),獲得
2021-04-29 11:09:546 為了提升跨模態(tài)行人重識別算法的識別精度,提出了一種基于改進(jìn)困難三元組損失的特征學(xué)習(xí)框架。首先,改進(jìn)了傳統(tǒng)困難三元組損失,使其轉(zhuǎn)換為全局三元組損失。其次,基于跨模態(tài)行亼重識別中存在模態(tài)間變化及模態(tài)內(nèi)變
2021-05-10 11:06:149 行人再識別是當(dāng)前圖像識別領(lǐng)域的一個重要硏究分支,在取得眾多研究成果的同時,在實際場景中的應(yīng)用也存在諸多挑戰(zhàn)。攝像設(shè)備和拍攝場景的差異,以及穿著、尺度、部分遮擋、姿態(tài)等對行人外觀的影響,給行人再識別
2021-05-12 16:22:334 行人是交通系統(tǒng)中的主要參與者,也是交通事故中的主要受害者,如何利用現(xiàn)代科學(xué)技術(shù)來保護(hù)行人的生命安全變得越來越迫切。行人檢測作為智能交通控制系統(tǒng)、高級駕駛員輔助系統(tǒng)(ADAS)、姿態(tài)估計等相關(guān)
2021-05-19 13:51:533038 
由于可見光圖像和紅外圖像的成像原理不同,可見光圖像的行人檢測算法難以直接應(yīng)用于紅外圖像中為此,提出一種基于多級梯度特征的紅外圖像行人檢測算法。使用改進(jìn)的圖像顯著性檢測算法提取紅外圖像的關(guān)鍵區(qū)域
2021-05-27 16:27:036 利用單尺度特征映射進(jìn)行多尺度行人檢測存在準(zhǔn)確率和效率較低的問題。為此,提出一種基于多分辨率濾波通道的多尺度檢測方法。應(yīng)用尺度感知池增強(qiáng)感受域?qū)?yīng)性,通過軟決策樹實現(xiàn)尺度不變性,在使用滑動窗分類策略
2021-05-27 16:30:417 行人再識別是視頻監(jiān)控中一項極具挑戰(zhàn)性的仼務(wù)。圖像中的遮擋、光照、姿態(tài)、視角等因素,會對行人再識別的準(zhǔn)確率造成極大影響。為了提高行人再識別的準(zhǔn)確率,提出一種融合視點(diǎn)機(jī)制與姿態(tài)估計的行人再識別方法。首先
2021-05-28 16:41:155 針對傳統(tǒng)卷積神經(jīng)網(wǎng)絡(luò)在行人檢測中卷積速度慢、抗噪弱、冗余大的問題,提岀了一種基于深度稀疏自編碼網(wǎng)絡(luò)的方法。首先在輸入層后添加一層感興趣層,在非相鄰和相鄰特征(nor- neighboring
2021-06-11 14:53:3512 今天給大家介紹的,就是這樣一套不僅擁有上述能力,還直接提供目標(biāo)檢測、屬性分析、關(guān)鍵點(diǎn)檢測、行為識別、ReID等產(chǎn)業(yè)級預(yù)訓(xùn)練模型的實時行人分析工具PP-Human,方便開發(fā)者靈活取用及更改!
2022-04-20 10:16:481691 主要內(nèi)容:利用聚類分析對采集的上海道路54例典型行人危險工況進(jìn)行分析,得到了5類具有典型特征的危險場景,并將前四類用于AEB行人測試場景的設(shè)計。
2022-10-31 15:13:34735 需要ROS,OSDK,MSDK,三大類的包,后面是行人監(jiān)測+KCF追蹤。
2023-01-29 15:10:40629 在先進(jìn)駕駛輔助系統(tǒng)中, 基于視覺的行人檢測只能對攝像頭視野范圍內(nèi)的無遮擋行人進(jìn)行檢測, 并且易受天氣的影響, 在極端天氣下無法工作。
2023-02-22 10:17:462314 行人過街智能預(yù)警系統(tǒng)是一種設(shè)置在無交通信號燈控制的人行橫道線處,通過采集過街行人和車輛數(shù)據(jù),向行人或車輛預(yù)警的系統(tǒng),包括單向預(yù)警與雙向預(yù)警兩種。
2021-09-17 17:08:391609 
微波雷達(dá)人車區(qū)分的原理是通過發(fā)射雷達(dá)信號,獲取雷達(dá)信號的回波信號,從而精準(zhǔn)且快速地識別并區(qū)分車輛和行人。
2021-11-05 09:56:551032 
數(shù)據(jù)的獲取尤為重要,是 科學(xué)的行人服務(wù)設(shè)施規(guī)劃設(shè)計和優(yōu)化配置的基礎(chǔ)。文章采用基于SSD模型行人檢測與現(xiàn)常用的基于HOG與SVM特征識別 算法比較對行人檢測,并利用Kalman濾波算法對行人跟蹤,使用OpenCV3.4.7計算機(jī)視覺庫和MFC對行人監(jiān)
2023-07-20 14:45:010 基于單張RGB圖像在3D場景空間中定位行人對于各種下游應(yīng)用至關(guān)重要。目前的單目定位方法要么利用行人的包圍盒,要么利用他們身體的可見部分進(jìn)行定位。
2023-09-08 09:29:24420 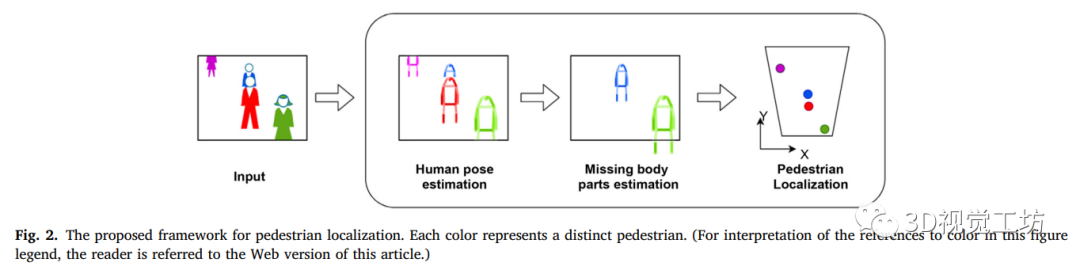
基于激光雷達(dá)(LiDAR)的行人重識別。我們利用低成本的LiDAR設(shè)備解決了人員再識別中的挑戰(zhàn),構(gòu)建了名為LReID的LiDAR數(shù)據(jù)集,并提出了一種名為ReID3D的LiDAR-based ReID框架。
2023-12-11 10:41:53168 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論