兩年前跟老師學(xué)了一半的OPENCV,后來(lái)放棄了,現(xiàn)在來(lái)看看這個(gè)軟件,發(fā)覺(jué)很有趣,不過(guò)也沒(méi)人帶了
2013-05-28 13:51:12
本章節(jié)將介紹 OpenCV 的移植方法,及結(jié)合 Qt 例程去進(jìn)一步學(xué)習(xí) OpenCV 識(shí)別圖像。本章節(jié)使用的資料已經(jīng)放到了開(kāi)發(fā)板網(wǎng)盤(pán)資料中,路徑為:“11_Linux 系統(tǒng)開(kāi)發(fā)進(jìn)階/86_章節(jié)_移植 OpenCv3.4.1 使用資料”。
2021-02-04 06:16:15
的應(yīng)用領(lǐng)域非常廣泛,包括圖像拼接、圖像降噪、產(chǎn)品質(zhì)檢、人機(jī)交互、人臉識(shí)別、動(dòng)作識(shí)別、動(dòng)作跟蹤、無(wú)人駕駛等。本篇介紹ARM Linux下OpenCV的移植和簡(jiǎn)單使用。2.環(huán)境介紹2.1.硬件1) NUC972開(kāi)...
2021-11-03 07:01:48
,然后上位機(jī)將接收到的數(shù)據(jù)顯示出來(lái)。在單片機(jī)發(fā)送數(shù)據(jù)的間隙時(shí)刻,Labview儀表指針以及字符串顯示框都顯示為零,只有在發(fā)送數(shù)據(jù)的那一瞬間指針擺動(dòng)了一下,而且數(shù)值也是跟接收到的值一致的,請(qǐng)教各位大俠,你們有沒(méi)有遇到過(guò)這種情況?你們是如何處理的呢?
2012-10-12 22:43:13
使用Qt加OpenCV進(jìn)行數(shù)字圖像處理了還是很不錯(cuò)的,參考網(wǎng)上一個(gè)帖子分享一下經(jīng)驗(yàn):環(huán)境:Windows下的Qt4.7.0安裝qt-sdk-win-opensource-4.7下載OpenCV庫(kù)
2015-11-22 16:12:04
labview VBM編程控件找不到在哪個(gè)面板?有沒(méi)有大神知道這個(gè)控件是在哪里出現(xiàn)的,源程序是一個(gè)儀表識(shí)別,這個(gè)控件的作用是在圖片上把指針對(duì)應(yīng)的刻度點(diǎn)標(biāo)記出來(lái)。
2022-08-03 16:49:48
labview2018+vision assistant2018制作,可以實(shí)現(xiàn)儀表圖片的刻度識(shí)別,給有需要的同學(xué)做個(gè)參考,不喜勿噴啊
2020-04-24 09:06:16
本帖最后由 weihk 于 2017-2-23 19:46 編輯
請(qǐng)問(wèn),如何將labview中表盤(pán)控件的指針修改成自定義形狀?例如,用真實(shí)儀表盤(pán)照片中提取的指針來(lái)代替控件中原有指針。 在自定義
2017-02-23 18:50:53
請(qǐng)問(wèn)誰(shuí)會(huì)labview調(diào)用opencv,我想調(diào)用opencv里人臉識(shí)別的功能,求指點(diǎn)
2016-06-21 18:24:42
`2017labview 量表控件右鍵怎么不能添加刻度,請(qǐng)大神指點(diǎn)下。。。大神在不,想做一個(gè)轉(zhuǎn)速儀表,插值顏色如何自定義:5800以下綠色,5800到6200顯示黃色,6200以上顯示紅色。`
2018-10-21 20:50:23
本帖最后由 eehome 于 2013-1-5 10:08 編輯
labview量表添加幾個(gè)指針之后,如何改變某個(gè)指針的長(zhǎng)短,或者改變其形狀,另外就是刻度如何改,比如我做一個(gè)時(shí)鐘,中間數(shù)字1和2之間應(yīng)該有4小格,他只有3小格,能否改變?
2012-12-26 19:54:17
linux上配置OpenCV人臉識(shí)別,并進(jìn)行人臉識(shí)別測(cè)試6.結(jié)合外圍設(shè)備進(jìn)行其他一些功能實(shí)現(xiàn)(PS:學(xué)習(xí)中同時(shí)發(fā)帖分享學(xué)習(xí)心得)
2016-01-18 16:23:09
本帖最后由 cyxa 于 2018-5-17 23:50 編輯
由于項(xiàng)目需要使用該開(kāi)發(fā)板讀取攝像頭的圖像進(jìn)行人臉識(shí)別,人臉識(shí)別算法采用opencv的庫(kù)來(lái)完成。本次將在搭載ubuntu17.10
2018-05-17 00:24:24
opencv API,研究圖像處理算法。5、學(xué)習(xí)機(jī)器學(xué)習(xí),利用模板匹配方法進(jìn)行人臉識(shí)別。6、在linux上配置opencv,利用opencv處理數(shù)據(jù),進(jìn)行人臉識(shí)別。7、測(cè)試,寫(xiě)報(bào)告。
2015-12-18 14:34:30
RVSpace:【RISC-V + OpenCV 計(jì)算機(jī)視覺(jué)】用 VisionFive 2 昉·星光 2 進(jìn)行物體識(shí)別
bilibili:【【RISC-V + OpenCV 計(jì)算機(jī)視覺(jué)】用
2023-09-08 11:42:32
;)看一下效果:光線(xiàn)不好還是能認(rèn)出來(lái),說(shuō)明opencv自帶的分類(lèi)器算開(kāi)源里面不錯(cuò)的了~參考:Tigerboard開(kāi)發(fā)板試用體驗(yàn) python+opencv的人臉識(shí)別 NanoPi2試用體驗(yàn) 簡(jiǎn)單人臉識(shí)別-結(jié)項(xiàng)
2016-05-13 21:38:47
本文主要介紹如何基于openCV來(lái)實(shí)現(xiàn)一個(gè)簡(jiǎn)單的貓臉識(shí)別應(yīng)用。
一、基礎(chǔ)準(zhǔn)備
首先需要安裝openCV,因?yàn)閜ython版的方便點(diǎn),所以直接安裝python版openCV,通過(guò)命令sudo
2023-09-24 23:50:23
數(shù)較少,這有助于進(jìn)行深入分析及驗(yàn)證一些新的理論。 在神經(jīng)網(wǎng)絡(luò)中,也可以利用分層的方式,讓每個(gè)神經(jīng)元負(fù)責(zé)識(shí)別數(shù)字的一部分,最終到達(dá)識(shí)別所有數(shù)字的目的。選擇適當(dāng)?shù)募せ詈瘮?shù)也是神經(jīng)網(wǎng)絡(luò)中一個(gè)重要的步驟,常用
2023-09-18 14:01:40
旋轉(zhuǎn)指示控件設(shè)置在完成制作后,即可進(jìn)行下載測(cè)試。除使用界面的調(diào)節(jié)控件來(lái)改變指針旋轉(zhuǎn)位置外,還可使用串口工具來(lái)讀取和修改指針的狀態(tài)。其中讀取溫度指針狀態(tài)的測(cè)試如圖10所示,接收信息中的“64”即表示溫度為
2022-03-13 21:08:17
RK3568四核Arm Cortex-A55 處理器的主板,從廠(chǎng)商的宣傳看,其主要市場(chǎng)就是人臉識(shí)別等視頻和圖像應(yīng)用。今天就使用OpenCV自帶的DNN模塊進(jìn)行人臉識(shí)別,看看其性能如何。一、OpenCV及其
2023-01-11 22:06:56
大家好!我是Labview新手,最近用單片機(jī)通過(guò)串口每隔一定的時(shí)間間隔不停的向上位機(jī)發(fā)送數(shù)據(jù),然后上位機(jī)將接收到的數(shù)據(jù)用儀表顯示出來(lái)。在單片機(jī)發(fā)送數(shù)據(jù)的間隙時(shí)刻,Labview儀表指針顯示為零,只有
2012-10-13 21:31:13
、OpenCV可進(jìn)行攝像頭圖像采集并進(jìn)行處理,此處為了實(shí)現(xiàn)基于機(jī)器視覺(jué)的飛行控制(目前僅移植了一段在白色背景下識(shí)別黑色方塊的例子)。[p=22,null,left]注意1、我的軟件開(kāi)發(fā)環(huán)境為win764位
2015-10-20 09:05:33
在嵌入式開(kāi)發(fā)板上如何用opencv調(diào)用caffe模型進(jìn)行人臉識(shí)別并截圖呢?其代碼該如何去實(shí)現(xiàn)呢?
2021-12-27 06:56:49
本篇測(cè)評(píng)由電子工程世界的優(yōu)秀測(cè)評(píng)者“流行科技”提供。此次測(cè)試的開(kāi)源項(xiàng)目,是基于QT+OpenCV的人臉識(shí)別打卡項(xiàng)目。本次體驗(yàn)使用的是開(kāi)源的代碼,此代碼本來(lái)是運(yùn)行在WIN下的,為了測(cè)試稍微進(jìn)行了修改
2022-05-17 17:43:44
python+opencv實(shí)現(xiàn)車(chē)牌識(shí)別
2019-02-28 11:08:26
,MCU從控制器局域網(wǎng)(CAN)總線(xiàn)讀取車(chē)輛狀態(tài)信息。駕駛員可以接收到熟悉格式的信息,但步進(jìn)電機(jī)和儀表組的MCU會(huì)控制機(jī)械儀表和指針。儀表組上還有多個(gè)可識(shí)別的指示燈,并可發(fā)出可聽(tīng)見(jiàn)的鈴聲,為駕駛員提供更
2022-11-09 07:22:48
智能車(chē)創(chuàng)意組識(shí)別圖an用openmv 還是用 opencv 比較好
2023-10-24 06:24:31
OpenCV基礎(chǔ)知識(shí)及應(yīng)用領(lǐng)域設(shè)計(jì),包含OpenCV教程、OpenCV識(shí)別、OpenCV跟蹤及OpenCV圖像處理,充分翔實(shí)的向大家描述了OpenCV。更多精彩資料盡在:http://www.tjjbhg.com/zhuanti/opencv.html`
2015-07-06 14:41:43
OpenCV的imread接口讀取進(jìn)來(lái)的JPG圖片尺寸問(wèn)題
2023-09-19 07:52:15
工作臺(tái)等部分構(gòu)成。它的工作原理由攝像機(jī)拍攝表盤(pán)圖像,然后把圖像翻譯成數(shù)字信號(hào)輸入計(jì)算機(jī),再由計(jì)算機(jī)對(duì)此信號(hào)進(jìn)行處理并最終自動(dòng)分析得到指針所指的示值,最后定出指針式儀表的精度,并完成誤差分析,實(shí)現(xiàn)指針式儀表
2014-05-10 11:03:34
儀表測(cè)量多種參數(shù)。例如,將測(cè)量機(jī)構(gòu)中的固定線(xiàn)圈和可動(dòng)線(xiàn)圈串聯(lián)起來(lái),由于此時(shí)I1=I2=1,φ=0,故有=KI2,在標(biāo)度尺上按電流刻度,就得到電動(dòng)系儀表。如將固定線(xiàn)圈和可動(dòng)線(xiàn)圈與分壓電阻串聯(lián),當(dāng)分壓電
2017-10-25 09:21:46
設(shè)計(jì),座艙中儀表板和中央操縱臺(tái)上的分立儀表均為觸摸響應(yīng)的虛擬儀表,用GLStudio進(jìn)行虛擬儀表開(kāi)發(fā)。座艙結(jié)構(gòu)、座椅、飛行操作聯(lián)動(dòng)機(jī)構(gòu)、駕駛桿、總距桿等均做成硬件結(jié)構(gòu),通過(guò)網(wǎng)絡(luò)將硬件機(jī)構(gòu)的控制信號(hào)傳給
2019-06-10 05:00:05
誰(shuí)會(huì)讀取儀表里面的程序?
2023-02-28 13:10:48
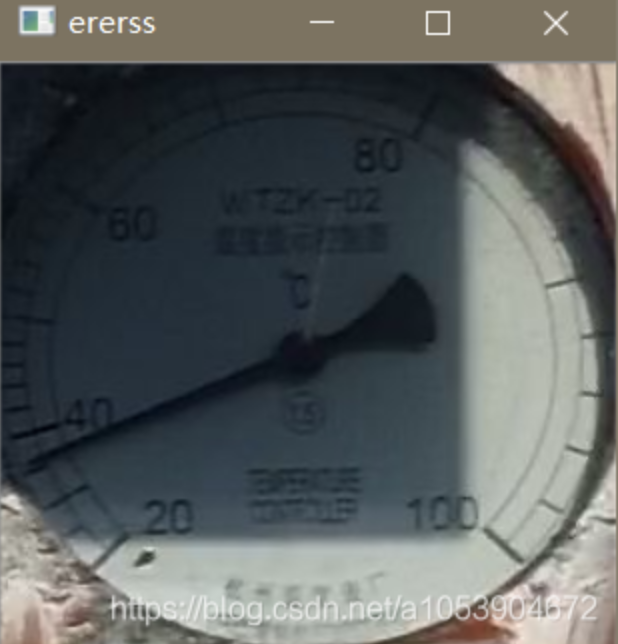
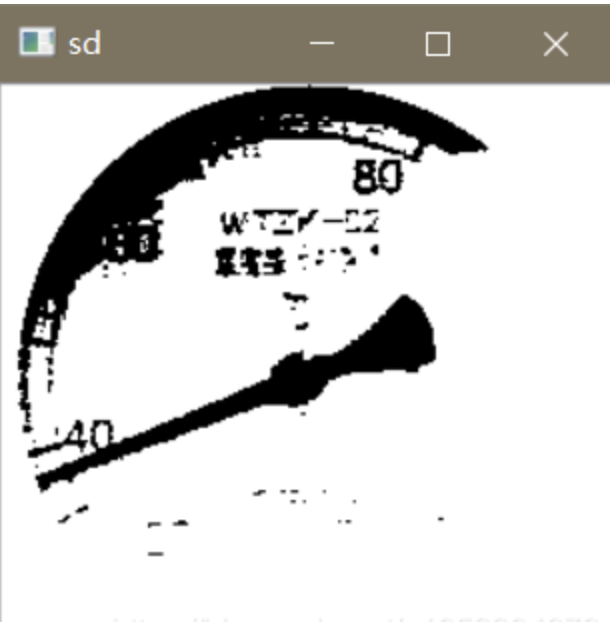
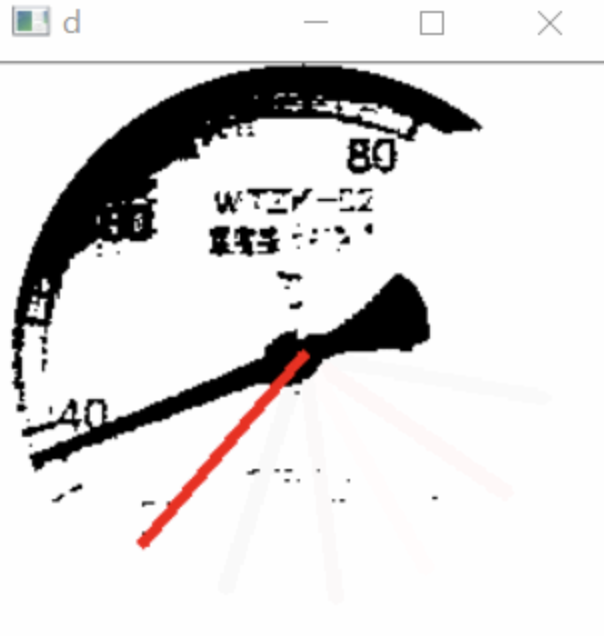
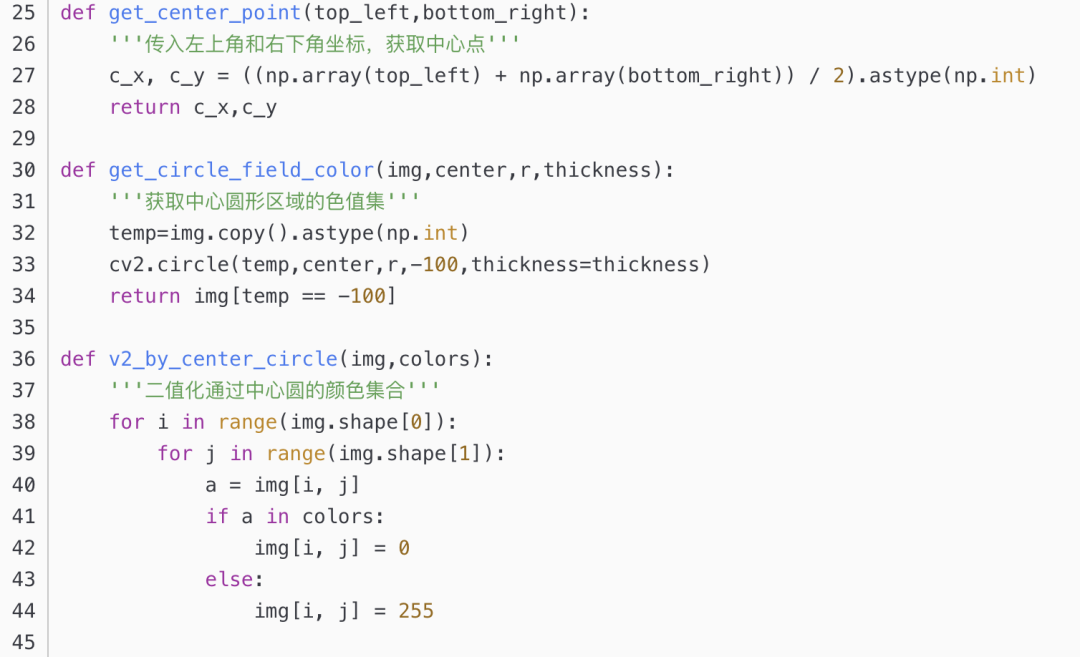
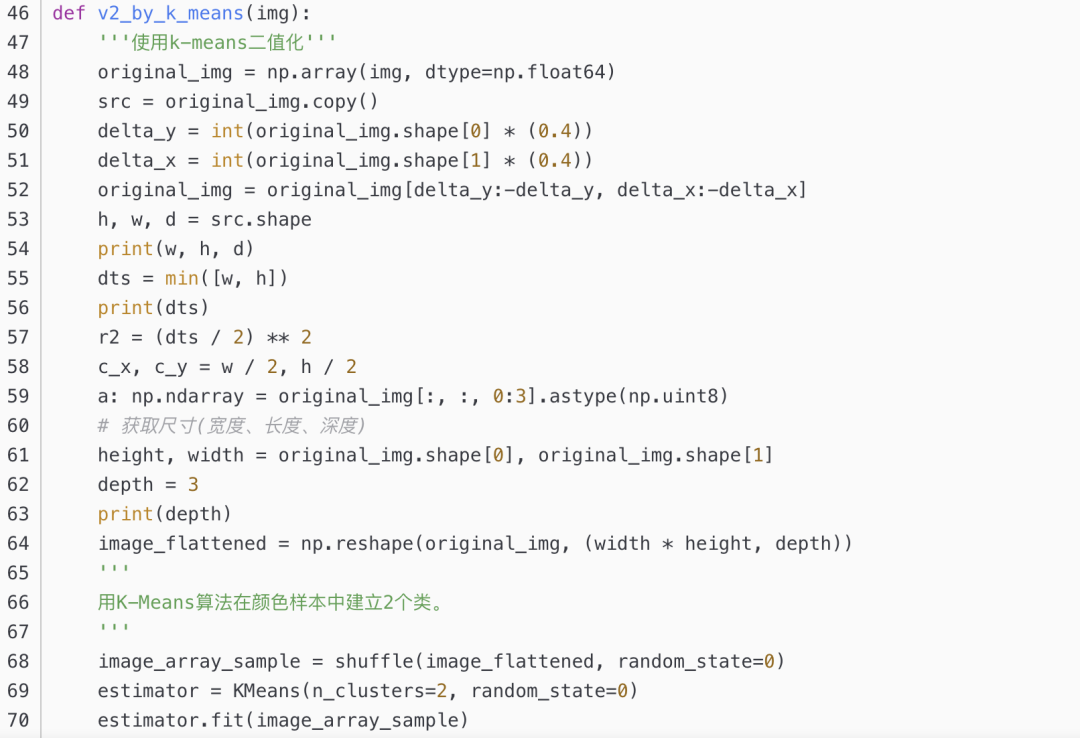
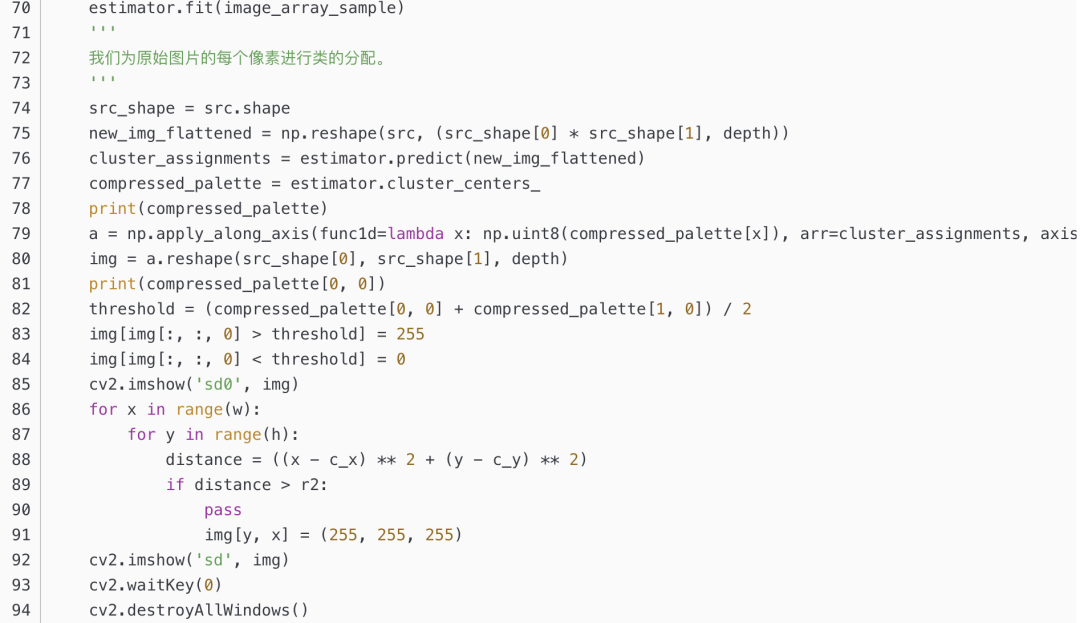
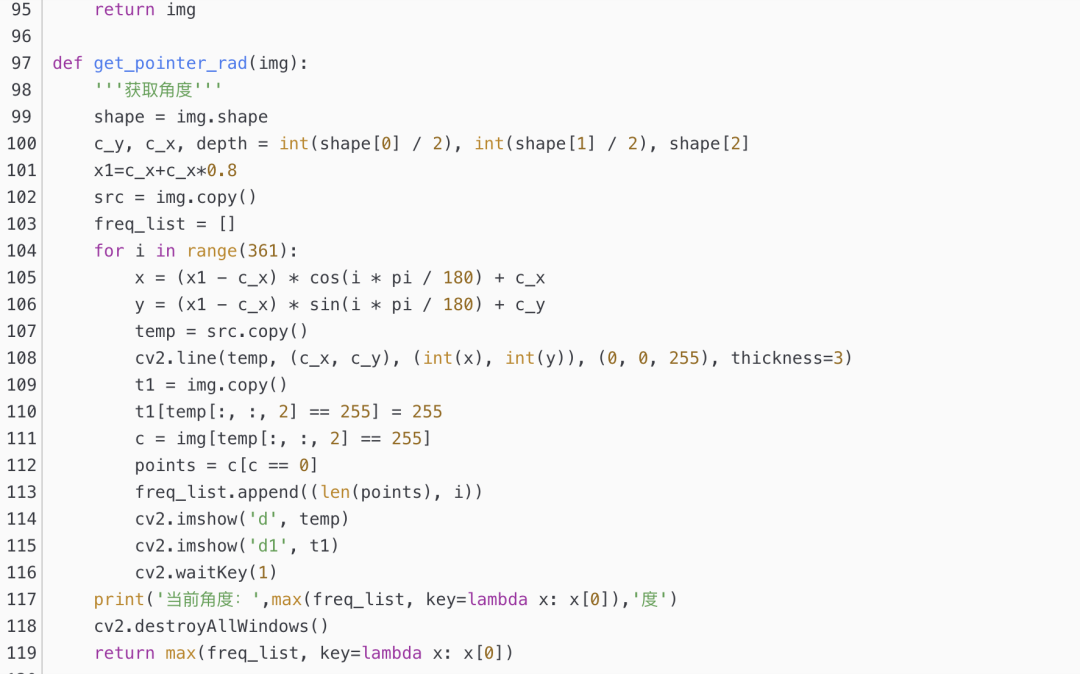
圖片有一定的角度,在處理數(shù)據(jù)前必須對(duì)數(shù)據(jù)進(jìn)行標(biāo)定,這樣讀取到的指針數(shù)據(jù)才能正確的換算成數(shù)值。 對(duì)儀表圖象的處理一般分為三步,一為預(yù)處理,并將圖象放入到圖象數(shù)據(jù)數(shù)組中;二為標(biāo)定刻度值,求解相似度來(lái)獲得
2019-04-30 09:40:05
本文介紹數(shù)字圖像處理在指針式指示表讀數(shù)識(shí)別中的應(yīng)用。計(jì)算機(jī)在獲取指示表數(shù)字圖像后,首先對(duì)圖像進(jìn)行預(yù)處理,然后通過(guò)Hough 變換準(zhǔn)確、快速地識(shí)別出指示表指針所在直線(xiàn)的
2009-08-04 10:03:11 21
21 本文提出一種基于亞象素圖象處理方法的游標(biāo)刻度計(jì)算機(jī)讀取算法,該算法使用二次曲線(xiàn)擬合的圖像亞像素邊緣定位算法,在不影響精度的情況下大大降低了對(duì)圖象采集裝置的要
2009-08-06 10:11:1216 本文在簡(jiǎn)單介紹指針式儀表及其常用識(shí)別方法的基礎(chǔ)上,提出了一種基于最大灰度相減法的新型識(shí)別方法。然后詳細(xì)介紹了這一方法的工作過(guò)程
2009-09-14 09:18:3521 為了對(duì)指針式儀表進(jìn)行全自動(dòng)檢定,設(shè)計(jì)出一種基于圖像識(shí)別的檢定系統(tǒng),提出了軟硬件設(shè)計(jì)方案。該系統(tǒng)采用單片機(jī)控制步進(jìn)電機(jī)使儀表指針轉(zhuǎn)動(dòng),然后采用USB2.0CCD攝像頭獲取儀
2009-12-18 16:26:2315 DSP通過(guò)對(duì)采集到的圖像進(jìn)行灰度變換、邊沿檢測(cè)以及Hough變換等處理后,實(shí)現(xiàn)對(duì)指針式儀表表盤(pán)的識(shí)別、指針定位和讀數(shù)計(jì)算,以及指針讀數(shù)的存儲(chǔ)和傳輸。系統(tǒng)可通過(guò)串口實(shí)現(xiàn)組網(wǎng)測(cè)量與
2011-12-12 14:34:2332 本專(zhuān)題主要幫助讀者快速入門(mén) OpenCV,而無(wú)需到處搜尋參考資料,為你免除大量自行搜索的時(shí)間,本專(zhuān)題主要給大家介紹OpenCV基礎(chǔ)知識(shí)及應(yīng)用領(lǐng)域設(shè)計(jì),包含OpenCV教程、OpenCV識(shí)別、OpenCV跟蹤及OpenCV圖像處理,充分翔實(shí)的向大家描述了OpenCV。
2015-07-06 14:11:14

關(guān)于opencv下cvaux的代碼,能夠識(shí)別動(dòng)態(tài)物體,利用庫(kù)函數(shù)
2015-12-10 16:53:1714 對(duì)于圖像監(jiān)控而言,多數(shù)監(jiān)控只是簡(jiǎn)單的捕捉圖像、處理圖像,最后再通過(guò)人工進(jìn)行識(shí)別,缺少智能監(jiān)控,特別是針對(duì)某一特定需求的特征識(shí)別。本文設(shè)計(jì)一種基于OpenCV的圖像智能識(shí)別系統(tǒng),利用攝像頭采集圖像
2015-12-31 09:20:2520 使用opencv進(jìn)行圖像處理_于仕琪,感興趣的可以看看。
2016-05-03 14:45:450 《OpenCV3編程入門(mén)》書(shū)本配套源代碼:xml和YAML文件的讀取
2016-06-06 15:20:546 《OpenCV3編程入門(mén)》OpenCV3版書(shū)本配套示例程序06,使用VideoCapture類(lèi)進(jìn)行視頻讀取和播放。
2016-06-06 15:20:540 《OpenCV3編程入門(mén)》書(shū)本配套源代碼:用OpenCV進(jìn)行基本繪圖
2022-05-11 16:46:5334 《OpenCV3編程入門(mén)》書(shū)本配套源代碼:用指針訪(fǎng)問(wèn)像素
2016-06-06 15:54:499 opencv備忘單,opencv_cheatsheet,opencv_tutorials,opencv_user,opencv2refman2
2016-08-25 15:52:390 OpenCV3編程入門(mén)-源碼例程全集-xml和YAML文件的讀取
2016-09-18 16:38:460 OpenCV3編程入門(mén)-源碼例程全集-人臉識(shí)別
2016-09-17 22:55:311 OpenCV3編程入門(mén)-源碼例程全集-用OpenCV進(jìn)行基本繪圖,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:02:253 OpenCV3編程入門(mén)-源碼例程全集-用指針訪(fǎng)問(wèn)像素,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:02:252 基于改進(jìn)自適應(yīng)閾值法的指針儀表圖像預(yù)處理_孫勇
2017-01-18 20:21:461 基于OpenCv運(yùn)動(dòng)目標(biāo)識(shí)別技術(shù)的研究_孟介成
2017-03-17 08:00:005 刻度標(biāo)尺精確定位系統(tǒng)采用電磁感應(yīng)原理來(lái)檢測(cè)移動(dòng)設(shè)備的位移量,當(dāng)游尺指針線(xiàn)圈中通入交變電流時(shí),在游尺指針附近會(huì)產(chǎn)生交變磁場(chǎng)。刻度標(biāo)尺近似處在一個(gè)交變的、均勻分布的磁場(chǎng)中,每對(duì)刻度標(biāo)尺芯線(xiàn)會(huì)產(chǎn)生感應(yīng)電動(dòng)勢(shì)。
2017-08-29 15:18:3819 針對(duì)靜態(tài)測(cè)試中空指針引用缺陷假陽(yáng)性問(wèn)題,提出一種空指針引用缺陷分類(lèi)假陽(yáng)性識(shí)別方法。挖掘空指針引用缺陷知識(shí),對(duì)空指針引用缺陷知識(shí)進(jìn)行預(yù)處理,生成空指針引用缺陷數(shù)據(jù)集;通過(guò)基于粗糙集理論屬性重要性
2017-11-25 11:04:228 因?yàn)?b class="flag-6" style="color: red">指針與刻度的表面有一定空隙,空隙愈大則易發(fā)生視差。如果在刻度盤(pán)上裝一鏡片,在指針與鏡片中指針的投影重合時(shí)取讀數(shù),即可減小視差。因此鏡片的作用是減小讀數(shù)的視差,提高其準(zhǔn)確性。
2017-12-11 10:17:39 9318
9318 問(wèn):為什么有的儀表在刻度盤(pán)上裝一鏡片?
答:因?yàn)?b class="flag-6" style="color: red">指針與刻度的表面有一定空隙,空隙愈大則易發(fā)生視差。如果在刻度盤(pán)上裝一鏡片,在指針與鏡片中指針的投影重合時(shí)取讀數(shù),即可減小視差。因此鏡片的作用是減小
2018-01-08 15:41:454773 時(shí),指針若恰好指在刻度線(xiàn)上,直接讀取即可;若不在刻度線(xiàn)上,則讀取指針右側(cè)最近的刻度值,加上指針左右側(cè)刻度之間的估計(jì)值。
2018-01-20 11:44:0362694 
Face ID 的興起帶動(dòng)了一波面部識(shí)別技術(shù)熱潮。本文將介紹如何使用 OpenCV、Python 和深度學(xué)習(xí)在圖像和視頻中實(shí)現(xiàn)面部識(shí)別,以基于深度識(shí)別的面部嵌入,實(shí)時(shí)執(zhí)行且達(dá)到高準(zhǔn)確度。
2018-07-17 16:20:287776 本文檔的主要內(nèi)容詳細(xì)介紹的是使用OpenCV進(jìn)行車(chē)牌數(shù)字識(shí)別的資料免費(fèi)下載。
2019-01-16 08:00:0028 汽車(chē)用液晶儀表是取代機(jī)械式指針儀表的一種新的顯示方式,因?yàn)闃O富科技感,近年來(lái)在高端車(chē)上多有應(yīng)用,目前也有向中低端車(chē)型滲透的趨勢(shì)。
2019-02-20 09:40:428143 針對(duì)巡檢機(jī)器人室外自 主識(shí)別儀表示數(shù)易受到光照影響的問(wèn)題,在研究了基于二維伽馬畫(huà)數(shù)的儀表圖像光照不均勻自適應(yīng)校正算法的基礎(chǔ)上,提出了基于最大穩(wěn)定極值區(qū)域(MSER)提取指針區(qū)域的算法。首先,通過(guò)三尺
2019-03-27 15:22:0322 本教程重點(diǎn)介紹如何在Raspberry上使用OpenCV Pi可以讀取,顯示和寫(xiě)入圖像。這是開(kāi)始使用OpenCV時(shí)需要了解的基本內(nèi)容之一,也是最常用的代碼部分之一。
2019-07-30 09:57:3012023 說(shuō)下本人使用感受,最早本人使用指針萬(wàn)用表,使用時(shí),比如電阻檔有時(shí)需要調(diào)零,測(cè)電壓時(shí),先由高檔位開(kāi)始測(cè)量,以防止燒表,另外,測(cè)量時(shí)還需要放平穩(wěn),讀取數(shù)值時(shí)視線(xiàn)要垂直于刻度盤(pán)面。受人為和環(huán)境干擾較大。
2019-10-07 09:57:005095 OpenCV(開(kāi)源計(jì)算機(jī)視覺(jué)庫(kù))是一個(gè)非常有用的庫(kù)-它提供了許多有用的功能,例如文本識(shí)別,面部識(shí)別,對(duì)象檢測(cè),深度圖的創(chuàng)建和機(jī)器學(xué)習(xí)。
2019-10-13 17:04:003240 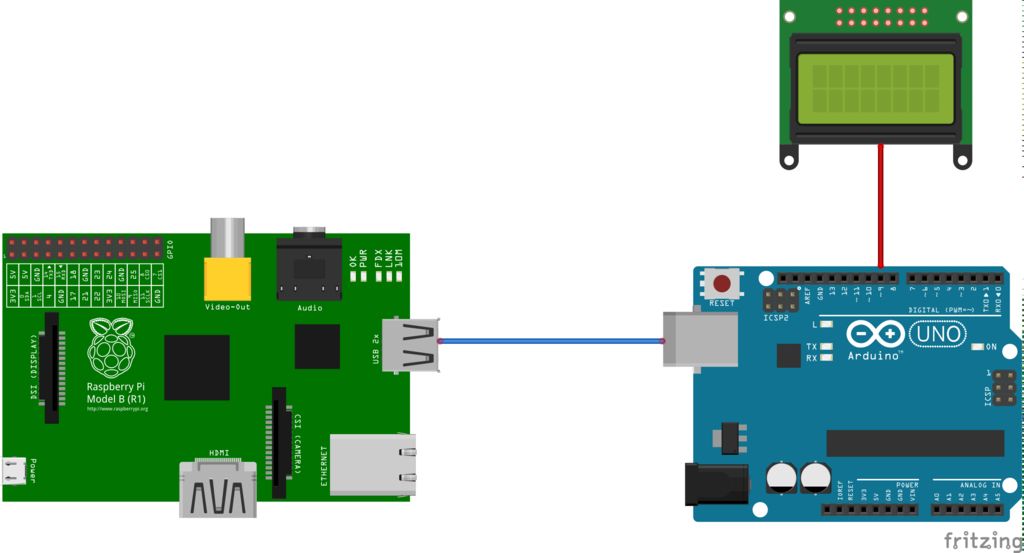
本文檔的主要內(nèi)容詳細(xì)介紹的是OpenCV進(jìn)行橢圓擬合的程序免費(fèi)下載。
2019-10-12 14:58:274 針對(duì)巡檢機(jī)器人室外自主識(shí)別儀表示數(shù)易受到光照影響的問(wèn)題,在研究了基于二維伽馬函數(shù)的儀表圖像光照不均勻自適應(yīng)校正算法的基礎(chǔ)上,提出了基于最大穩(wěn)定極值區(qū)域(MSER)提取指針區(qū)域的算法。首先,通過(guò)三尺
2019-10-29 16:11:213 通過(guò)指針,非常方便操作數(shù)組。比如串口的接收緩存,將接收緩存的首地址賦給指針后,CPU就可以通過(guò)結(jié)構(gòu)體的指針,讀取串口的接收緩存。
2020-05-02 07:22:002269 
針對(duì)巡檢機(jī)器人室外自主識(shí)別儀表示數(shù)易受到光照影響的問(wèn)題,在研究了基于二維伽馬函數(shù)的儀表圖像光照不均勻自適應(yīng)校正算法的基礎(chǔ)上,提岀了基于最大穩(wěn)定極值區(qū)域(MSFR)提取指針區(qū)域的算法。首先,通過(guò)三尺
2020-07-09 16:43:1418 指針式儀表因具有結(jié)構(gòu)簡(jiǎn)單、維護(hù)方便、不受電磁場(chǎng)干擾、可靠性高、價(jià)格便宜等優(yōu)點(diǎn),被廣泛應(yīng)用于科學(xué)實(shí)驗(yàn)和生產(chǎn)中。儀表檢測(cè)部門(mén)和儀表觀(guān)測(cè)單位在對(duì)儀表進(jìn)行觀(guān)測(cè)時(shí),其讀數(shù)通常由人工完成。由于人員視覺(jué)誤差
2020-08-24 16:24:32493 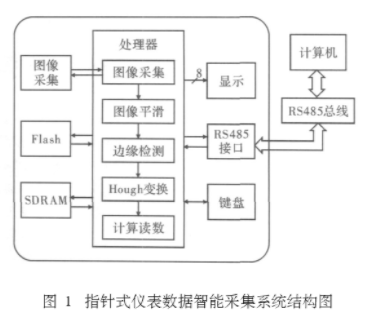
要從攝像頭或視頻文件讀取視頻,首先導(dǎo)入opencv 庫(kù)cv2. 使用cv2.VideoCapture() 方法創(chuàng)建一個(gè)VideoCapture 對(duì)象。該方法接收攝像頭的索引或視頻文件名。如果只有
2021-01-19 16:57:445 選擇合適的倍率檔位:測(cè)量電阻時(shí),倍率檔的選擇以使指針停留在刻度線(xiàn)較稀的部分為宜。指針越接近標(biāo)度尺的中間,讀數(shù)越準(zhǔn)確;越往左,刻度線(xiàn)越擠,讀數(shù)準(zhǔn)確度越差。倍率擋應(yīng)小于被測(cè)值
2021-02-08 18:33:005285 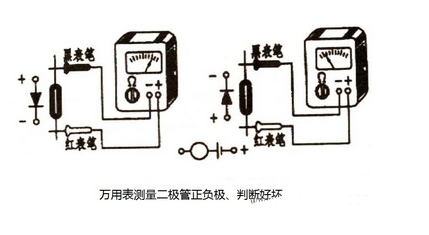
)供電,MCU從控制器局域網(wǎng)(CAN)總線(xiàn)讀取車(chē)輛狀態(tài)信息。駕駛員可以接收到熟悉格式的信息,但步進(jìn)電機(jī)和儀表組的MCU會(huì)控制機(jī)械儀表和指針。儀表組上還有多個(gè)可識(shí)別的指示燈,并可發(fā)出可聽(tīng)見(jiàn)的鈴聲,為駕駛員提供更豐富的信息。
隨著電子科技的進(jìn)步,里程表逐漸被字母數(shù)字顯示屏所取代,這種顯示屏主要顯示各
2021-11-10 09:36:47856 
首先說(shuō)一下模板匹配,它是OpenCV自帶的一個(gè)算法,可以根據(jù)一個(gè)模板圖到目標(biāo)圖上去尋找對(duì)應(yīng)位置,如果模板找的比較好那么效果顯著,這里說(shuō)一下尋找模板的技巧,模板一定要標(biāo)準(zhǔn)、精準(zhǔn)且特征明顯。
2022-04-13 14:20:37954 今天我們將使用相同的 OpenCV 和 Raspberry Pi 進(jìn)行人臉標(biāo)志檢測(cè)。來(lái)自 dlib 庫(kù)的預(yù)訓(xùn)練面部標(biāo)志檢測(cè)器模塊將用于檢測(cè)面部關(guān)鍵面部結(jié)構(gòu)的位置,python OpenCV 將用于可視化檢測(cè)到的面部部分。
2022-08-12 16:32:241211 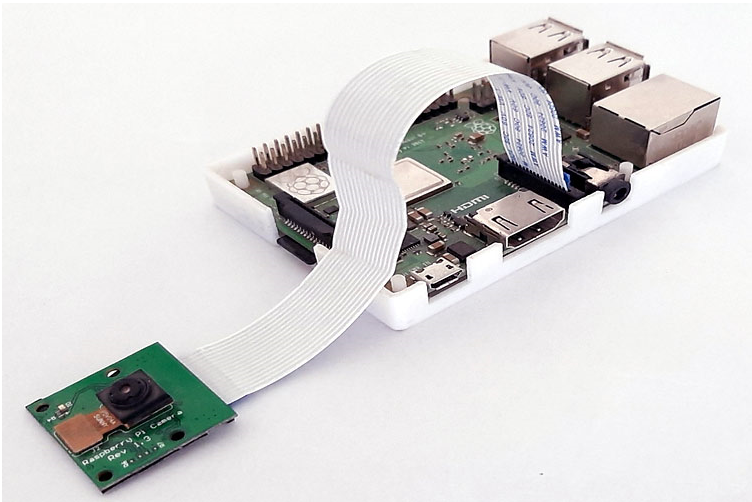
相信大部分同學(xué)們都已了解或接觸過(guò)OpenAtom OpenHarmony(以下簡(jiǎn)稱(chēng)“OpenHarmony”)了,但你一定沒(méi)在OpenHarmony上實(shí)現(xiàn)過(guò)人臉識(shí)別功能,跟著本文帶你快速在OpenHarmony標(biāo)準(zhǔn)設(shè)備上基于SeetaFace2和OpenCV實(shí)現(xiàn)人臉識(shí)別。
2022-08-17 10:50:181696 電子發(fā)燒友網(wǎng)站提供《Linux Debian與Python、Flask和OpenCV識(shí)別面部.zip》資料免費(fèi)下載
2022-08-24 10:16:492 電子發(fā)燒友網(wǎng)站提供《使用DFRobot LattePanda進(jìn)行OpenCV人臉識(shí)別.zip》資料免費(fèi)下載
2022-10-28 10:14:521 讓汽車(chē)儀表組上的指針動(dòng)起來(lái)
2022-10-31 08:23:460 電子發(fā)燒友網(wǎng)站提供《使用opencv和python進(jìn)行智能火災(zāi)檢測(cè).zip》資料免費(fèi)下載
2022-11-02 15:08:260 深度學(xué)習(xí)數(shù)據(jù)預(yù)處理中常用opencv讀入圖片,一般在`__getitem__`函數(shù)中調(diào)用。本文主要介紹opencv讀取圖片的一些細(xì)節(jié)以及注意事項(xiàng)。本文中使用的圖片見(jiàn)第6節(jié)“opencv測(cè)試使用的圖片”。
2023-02-07 16:06:05428 深度學(xué)習(xí)數(shù)據(jù)預(yù)處理中常用opencv讀入圖片,一般在`__getitem__`函數(shù)中調(diào)用。本文主要介紹opencv讀取圖片的一些細(xì)節(jié)以及注意事項(xiàng)。本文中使用的圖片見(jiàn)第6節(jié)“opencv測(cè)試使用的圖片”。
2023-02-07 16:06:18472 在LabVIEW中如何使用OpenCV DNN模塊實(shí)現(xiàn)手寫(xiě)數(shù)字識(shí)別
2023-03-08 16:10:48945 電子發(fā)燒友網(wǎng)站提供《使用Xbox Kinect和OpenCV進(jìn)行面部識(shí)別.zip》資料免費(fèi)下載
2023-07-04 11:25:130 算法分為4個(gè)流程,首先用yolov5s模型從原圖中識(shí)別出儀,接著用yolov8x-pose模型檢測(cè)出儀表中的刻度線(xiàn)、指針的關(guān)鍵點(diǎn),再用DBNetpp模型檢測(cè)出數(shù)值框并用SATRN模型進(jìn)行文本識(shí)別,最后后處理得到讀數(shù)結(jié)果。
2023-07-13 15:00:37425 
摘要:車(chē)牌識(shí)別系統(tǒng)在生活中的使用越發(fā)廣泛,占據(jù)重要地位。車(chē)牌識(shí)別一共分為圖像處理和字符識(shí)別兩部分。本文首先使用OpenCV技術(shù)定位車(chē)牌、分割車(chē)牌,接著應(yīng)用Tensorflow識(shí)別車(chē)牌字符。每個(gè)
2023-07-20 14:57:390 本示例以 FX5U-32MR/ES 為例讀取 ModbusTCP 網(wǎng)口儀表數(shù)據(jù),本示例采用 ModbusTCP 協(xié)議實(shí)現(xiàn),對(duì) ModbusTCP 從站協(xié)議的儀表,F(xiàn)X5U 可直接
2023-07-25 08:59:48955 
關(guān)于利用OpenCV進(jìn)行顏色分類(lèi),本文包含了HSV介紹及應(yīng)用、cv2.inRange及應(yīng)用、RGB與HSV通道的區(qū)別三個(gè)方面。
2023-08-18 10:32:22801 
1、檢測(cè)前,將功能旋鈕打到“Ω”擋,先將萬(wàn)用表進(jìn)行調(diào)零,即把萬(wàn)用表的紅表筆和黑表筆的筆頭相觸碰(無(wú)正負(fù)極之分),調(diào)整“調(diào)零旋鈕”,使得萬(wàn)用表指針指向0刻度線(xiàn)。
2023-10-05 09:46:001362 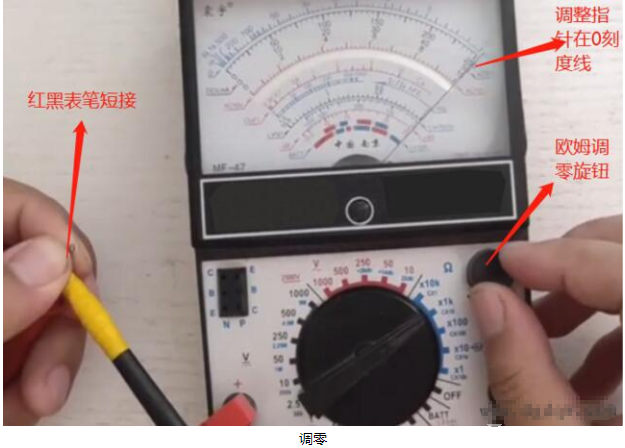
本文主要介紹如何基于openCV來(lái)實(shí)現(xiàn)一個(gè)簡(jiǎn)單的貓臉識(shí)別應(yīng)用。
2023-09-25 09:05:58613 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論