 電子發(fā)燒友App
電子發(fā)燒友App


PWM控制及SPWM波的生成
1、PWM控制的基本原理
PWM(PulseWidthModulation)控制就是對(duì)脈沖的寬度進(jìn)行調(diào)制的技術(shù)。即通過(guò)對(duì)一系列脈沖的寬度進(jìn)行調(diào)制,來(lái)等效地獲得所需要的波形。PWM控制技術(shù)在逆變電路中的應(yīng)用最為廣泛,對(duì)逆變電路的影響也最為深刻,PWM控制技術(shù)在逆變電路中的應(yīng)用也最具代表性。
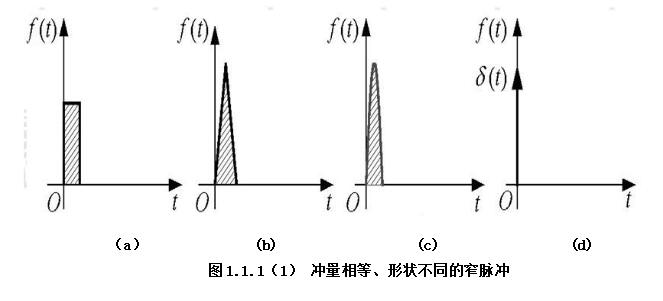
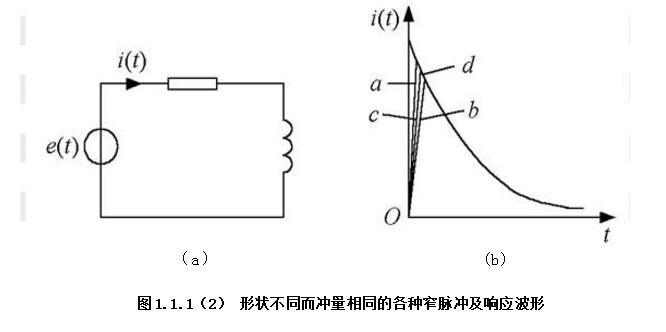
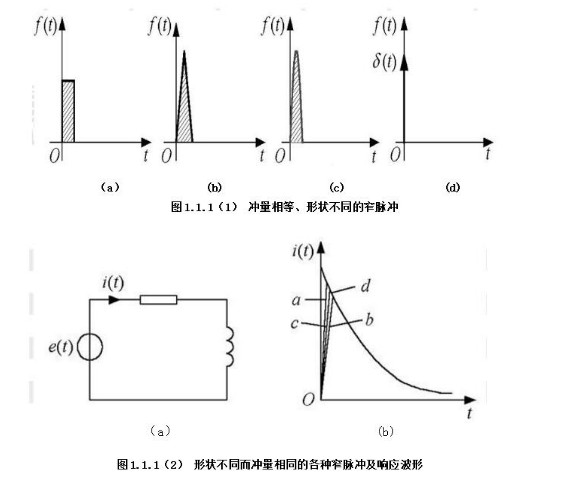
面積等效原理是PWM控制技術(shù)的重要理論基礎(chǔ),即在采樣控制中,沖量相等而形狀不同的窄脈沖加在具有慣性的同一環(huán)節(jié)上時(shí),其效果基本相同。其中,沖量指的是窄脈沖的面積;效果基本相同是指環(huán)節(jié)的輸出響應(yīng)波形基本相同。如圖1.1.1(1)所示,三個(gè)窄脈沖形狀不同,但是它們的面積都等于1,當(dāng)它們分別加在如圖1.1.1(2)(a)所示的R-L電路上時(shí),并設(shè)其電流i(t)為電路的輸出,則其輸出響應(yīng)波形基本相同且如圖1.1.1(2)(b)所示。
2、SPWM法的基本原理
脈沖幅值相等而脈沖寬度按正弦規(guī)律變化而正弦波等效的PWM波稱(chēng)為SPWM(sinusoidalPWM)波形。
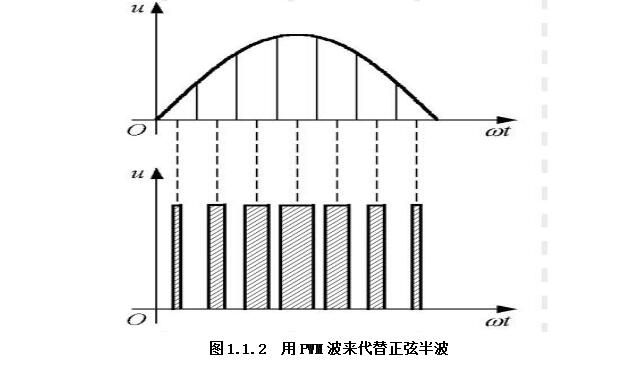
如圖1.1.2所示,把正弦半波分成N等份,就可以把正弦半波看成是由N個(gè)彼此相連的脈沖序列所組成的波形,這些脈沖寬度都等于N/?,但幅值不等,且脈沖頂部不是水平直線(xiàn),而是按正弦規(guī)律變化的曲線(xiàn)。如果把這些脈沖序列用相同數(shù)量的等幅值而不等寬的矩形脈沖來(lái)代替,使矩形脈沖的中點(diǎn)和相應(yīng)的正弦波部分中點(diǎn)重合,且使矩形脈沖和相應(yīng)的正弦波部分面積相等,則可得圖所示的矩形脈沖序列,這就是SPWM波形。
3、規(guī)則采樣法
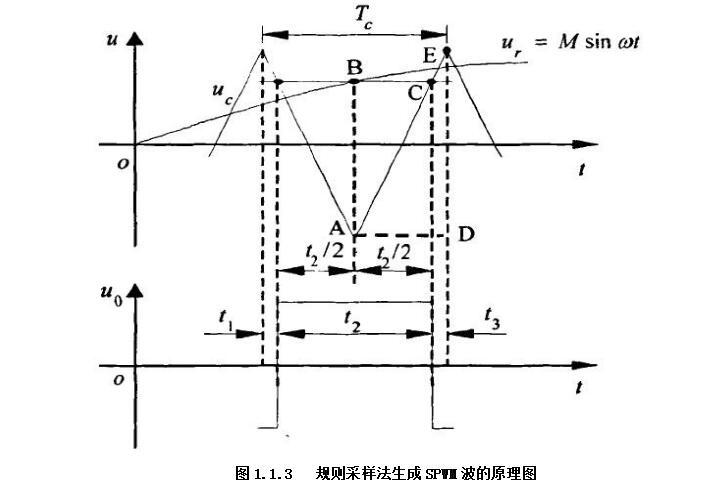
SPWM的控制就是根據(jù)三角載波與正弦調(diào)制波的交點(diǎn)來(lái)確定逆變器功率開(kāi)關(guān)器件的通斷時(shí)刻。規(guī)則采樣法是一種應(yīng)用較廣的工程實(shí)用方法,一般采用三角波作為載波,其原理就是用三角波對(duì)正弦波進(jìn)行采樣得到階梯波,再以階梯波與三角波的交點(diǎn)時(shí)刻控制開(kāi)關(guān)器件的通斷,從而實(shí)現(xiàn)SPWM法。當(dāng)三角波只在其頂點(diǎn)(或底點(diǎn))位置對(duì)正弦波進(jìn)行采樣時(shí),由階梯波與三角波的交點(diǎn)所確定的脈寬,在一個(gè)載波周期(即采樣周期)內(nèi)的位置是對(duì)稱(chēng)的,這種方法稱(chēng)為對(duì)稱(chēng)規(guī)則采樣其原理如圖1.1.3所示。
單極性和雙極性PWM控制逆變電路分析
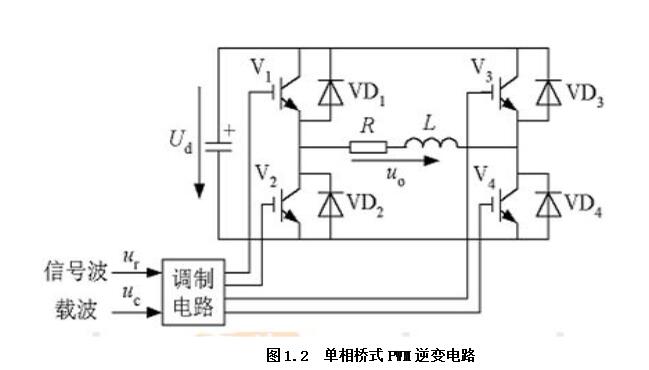
電路如圖1.2所示,該電路工作時(shí),1V和2V通斷互補(bǔ),3V和4V也通斷互補(bǔ),如在ou正半周,1V導(dǎo)通,2V關(guān)斷,3V和4V交替通斷,且負(fù)載電流比電壓滯后,在電壓正半周,電流有一段區(qū)間為正,一段區(qū)間為負(fù)。在ou的負(fù)半周,讓2V保持通態(tài),1V保持?jǐn)鄳B(tài),3V和4V交替通斷,負(fù)載電壓ou可以得到-dU和零兩種電平。
1、單極性PWM控制方式
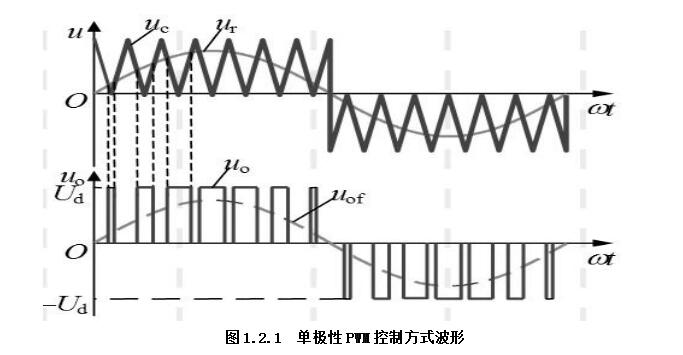
如圖1.2.1所示,調(diào)制信號(hào)ru為正弦波,載波cu在ru的正半周為正極性的三角波,在ru的負(fù)半周為負(fù)極性的三角波。a)在ru的正半周時(shí),1V保持通態(tài),2V保持?jǐn)鄳B(tài),當(dāng)ru》cu時(shí),使4V導(dǎo)、3V關(guān)斷,ou=dU。當(dāng)ru《cu時(shí),使4V關(guān)斷、3V導(dǎo)通,ou=0。b)在ru的負(fù)半周時(shí),1V保持?jǐn)鄳B(tài),2V保持通態(tài)。當(dāng)ru《cu時(shí),使3V導(dǎo)通、4V關(guān)斷,ou=-dU。當(dāng)ru》cu時(shí),使3V關(guān)斷、4V導(dǎo)通,ou=0。
1.1單極性PWM控制方式
如圖1.2.1所示,調(diào)制信號(hào)ru為正弦波,載波cu在ru的正半周為正極性的三角波,在ru的負(fù)半周為負(fù)極性的三角波。a)在ru的正半周時(shí),1V保持通態(tài),2V保持?jǐn)鄳B(tài),當(dāng)ru》cu時(shí),使4V導(dǎo)、3V關(guān)斷,ou=dU。當(dāng)ru《cu時(shí),使4V關(guān)斷、3V導(dǎo)通,ou=0。b)在ru的負(fù)半周時(shí),1V保持?jǐn)鄳B(tài),2V保持通態(tài)。當(dāng)ru《cu時(shí),使3V導(dǎo)通、4V關(guān)斷,ou=-dU。當(dāng)ru》cu時(shí),使3V關(guān)斷、4V導(dǎo)通,ou=0。
1.2雙極性PWM控制方式
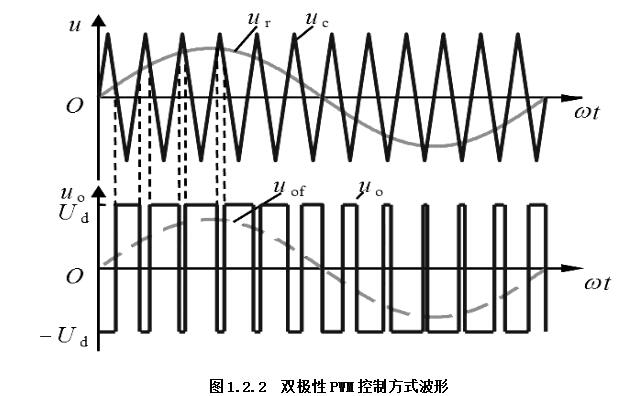
如圖1.2.2所示,在調(diào)制信號(hào)ru和載波信號(hào)cu的交點(diǎn)的時(shí)刻控制各個(gè)開(kāi)關(guān)器件的通斷。
a)在ru的半個(gè)周期內(nèi),三角波載波有正有負(fù),所得的PWM波也有正有負(fù),在ru的一個(gè)周期內(nèi),輸出的PWM波只有±dU兩種電平。b)在ru的正負(fù)半周,對(duì)各個(gè)開(kāi)關(guān)器件的控制規(guī)律相同。當(dāng)ru》cu時(shí),1V和4V導(dǎo)通,2V和3V關(guān)斷,這時(shí)如果oi》0,則1V和4V導(dǎo)通,如果oi《0,則1VD和4VD導(dǎo)通,但不管那種情況都是ou=dU。當(dāng)ru《cu時(shí),2V和3V導(dǎo)通,1V和4V關(guān)斷,這時(shí)如果oi《0,則2V和3導(dǎo)通,如果oi》0,則2VD和3VD導(dǎo)通,但是不管哪種情況都是ou=-dU。
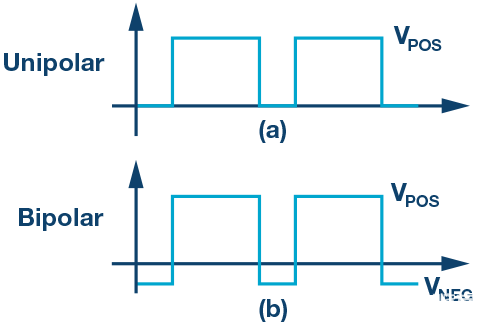
單極性與雙極性PWM模式
1.單極性PWM模式
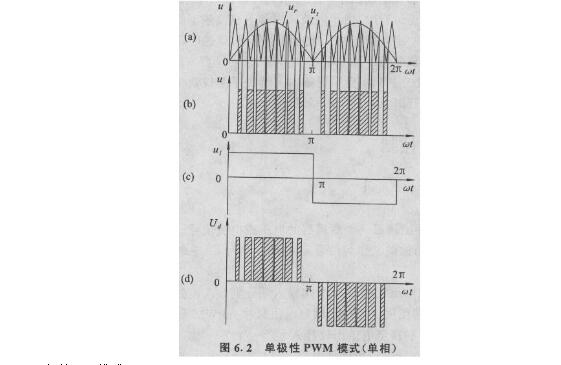
產(chǎn)生單極性PWM模式的基本原理如圖6.2所示。首先由同極性的三角波載波信號(hào)ut。與調(diào)制信號(hào)ur,比較(圖6.2(a)),產(chǎn)生單極性的PWM脈沖 (圖6.2(b));然后將單極性的PWM脈沖信號(hào)與圖6.2(c)所示的倒相信號(hào)UI相乘,從而得到正負(fù)半波對(duì)稱(chēng)的PWM脈沖信號(hào)Ud,如圖 6.2(d)所示。
2.雙極性PWM模式
雙極性PWM控制模式采用的是正負(fù)交變的雙極性三角載波ut與調(diào)制波ur,如圖6.3所示,可通過(guò)ut與ur,的比較直接得到雙極性的PWM脈沖,而不需要倒相電路。

與單極性模式相比,雙極性PWM模式控制電路和主電路比較簡(jiǎn)單,然而對(duì)比圖6.2(d)和圖6.3(b)可看出,單極性PWM模式要比雙極性PWM模式輸出電壓中、高次諧波分量小得多,這是單極性模式的一個(gè)優(yōu)點(diǎn)。
單極性調(diào)制方式的特點(diǎn)是在一個(gè)開(kāi)關(guān)周期內(nèi)兩只功率管以較高的開(kāi)關(guān)頻率互補(bǔ)開(kāi)關(guān),保證可以得到理想的正弦輸出電壓:另兩只功率管以較低的輸出電壓基波頻率工作,從而在很大程度上減小了開(kāi)關(guān)損耗。但又不是固定其中一個(gè)橋臂始終為低頻(輸出基頻),另一個(gè)橋臂始終為高頻[載波頻率),而是每半個(gè)輸出電壓周期切換工作,即同一個(gè)橋臂在前半個(gè)周期工作在低頻,而在后半周則工作在高頻,這樣可以使兩個(gè)橋臂的功率管工作狀態(tài)均衡,對(duì)于選用同樣的功率管時(shí),使其使用壽命均衡,對(duì)增加可靠性有利。
雙極性調(diào)制方式的特點(diǎn)是4個(gè)功率管都工作在較高頻率(載波頻率),雖然能得到正弦輸出電壓波形,但其代價(jià)是產(chǎn)生了較大的開(kāi)關(guān)損耗。
有限雙極性控制ZVZCSPWM全橋變換器
1、ZVZCS PWM全橋電路有限雙極性控制過(guò)程分析
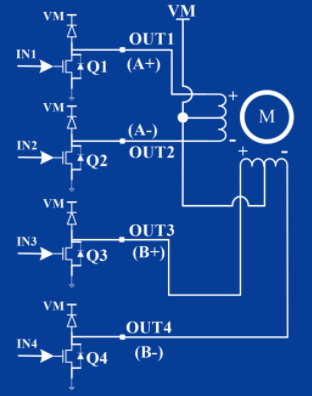
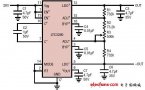
有限雙極性控制ZVZCS PWM全橋電路功率部分如圖1所示。Q1~Q4四個(gè)功率管(內(nèi)帶續(xù)流二極管)組成一個(gè)全橋電路。其中,Q1、Q2組成超前橋臂,兩端分別并聯(lián)有吸收電容C1、C2,用來(lái)實(shí)現(xiàn)Q1、Q2的ZVS。L1為高頻變壓器的漏感。Cb為隔直電容,用來(lái)實(shí)現(xiàn)滯后臂(由Q3、Q4組成)的ZCS。
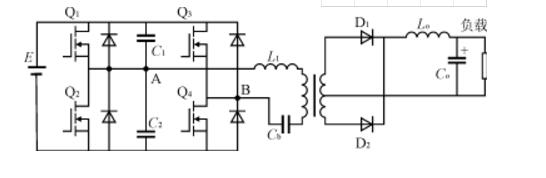
圖1 ZVZCSPWM全橋電路示意圖
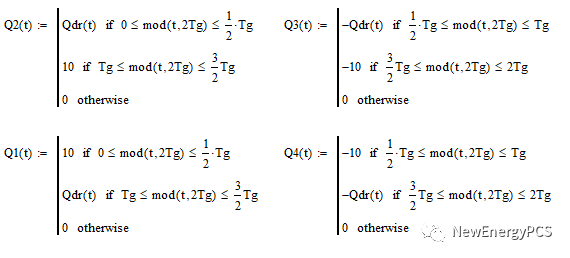
在有限雙極性方法控制下,Q1~Q4的驅(qū)動(dòng)時(shí)序見(jiàn)圖2。其中ug1、ug2為脈寬可調(diào)的定頻變寬脈沖;ug3、ug4為互補(bǔ)方波,頻率、脈寬固定。當(dāng)然考慮到直通的問(wèn)題,ug3、ug4不能同時(shí)為1,要錯(cuò)開(kāi)一個(gè)固定的死區(qū)時(shí)間。ug1、ug4的上升沿(表示Q1、Q4開(kāi)始導(dǎo)通)一致,ug2、ug3的上升沿一致。uAB表示加在隔直電容及變壓器兩端的電壓。由于超前橋臂并聯(lián)電容的存在,變壓器端電壓在下降時(shí)不會(huì)突然到零,而是有個(gè)過(guò)渡過(guò)程,其時(shí)間取決于并聯(lián)電容的大小及負(fù)載電流等條件。ip為變壓器繞組電流。ucb為隔直電容Cb上的電壓,其幅值取決于Cb大小及其它條件,Cb越小,ucb幅值越大,ZCS實(shí)現(xiàn)得越好,但同時(shí)開(kāi)關(guān)管電壓應(yīng)力又增大,因此Cb不能太小,一般要讓ucb最大值小于直流輸入電壓的10%。

圖2 全橋電路有限雙極性控制時(shí)序及各變量響應(yīng)圖
電路工作過(guò)程分析如下:
1)t0時(shí)刻Q1、Q4同時(shí)導(dǎo)通,變壓器原邊電流ip開(kāi)始上升,流向是從Q1到L1、變壓器、Cb、Q4。功率從原邊流向副邊,同時(shí)隔直電容Cb上的電壓開(kāi)始上升。為了簡(jiǎn)化分析,暫不考慮變壓器的勵(lì)磁電流和副邊電流Io的波動(dòng),因此變壓器原邊電流ip(t)為
ip(t)=Ipo=Io/n(1)
式中:n為變壓器原副邊匝比。
當(dāng)然,實(shí)際電路中由于副邊整流二極管的反向恢復(fù)過(guò)程,ip(t)上升沿有一個(gè)尖峰,見(jiàn)圖2。
Cb兩端電壓ucb(t)為
ucb(t)=![]() -ucbp(2)
-ucbp(2)
式中:ucbp為電容Cb上最大電壓。
2)在t1時(shí)刻Q1關(guān)斷,Q1的關(guān)斷是ZVS關(guān)斷,原邊電流ip通過(guò)C1(充電)、C2(放電)繼續(xù)按原方向流動(dòng)。C2經(jīng)過(guò)一段時(shí)間的放電,在t12時(shí)刻C2上的電壓降到零,Q2上的反并聯(lián)二極管開(kāi)始導(dǎo)通續(xù)流。此階段電容C2兩端電壓uc2(t)變化過(guò)程為
uc2(t)=Ipot/(C1+C2)(3)
并有
t12-t1=E(C1+C2)/Ipo(4)
式中:E為直流輸入電壓。
3)由于Cb上的電壓作用,在t2時(shí)刻環(huán)流衰減到零,原邊電流變化過(guò)程為
ip(t)=Ipo-ucbpt/L1(5)
該狀態(tài)持續(xù)時(shí)間(即環(huán)流時(shí)間)為
t2-t12=IpoL1/ucbp(6)
此時(shí)ucb(t)達(dá)到最大值UCbp。由式(2)可近似得到
t2-t0=2UCbpCb/Ipo(7)
4)在t2~t23時(shí)刻,電容Cb上的能量通過(guò)變壓器漏感對(duì)Q2的輸出電容充電,由于時(shí)間常數(shù)很小,可認(rèn)為該過(guò)程響應(yīng)速度很快,諧振過(guò)程很快結(jié)束。穩(wěn)定時(shí)Q2兩端電壓保持為UCbp。
5)t23時(shí)刻Q4關(guān)斷,顯然,由于此時(shí)Q4上電壓電流均為零,因此Q4是ZVZCS關(guān)斷。經(jīng)一個(gè)固定的死區(qū)時(shí)間后,在t3時(shí)刻,Q2、Q3同時(shí)導(dǎo)通,由于此時(shí)Q2兩端電壓為UCbp,由設(shè)計(jì)可保證UCbp《10%E,且環(huán)流已衰減到零,因此可近似認(rèn)為Q2是ZVZCS導(dǎo)通。而Q3是硬開(kāi)關(guān)導(dǎo)通,而且Q3導(dǎo)通時(shí)其兩端電壓大小約為直流輸入電壓大小。而在普通硬開(kāi)關(guān)工作方式下Q3導(dǎo)通時(shí)其端電壓是直流輸入電壓的一半,因此ZVZCS控制模式下Q3導(dǎo)通時(shí)輸出電容上的能量損耗反而比普通硬開(kāi)關(guān)狀態(tài)下大,這是這種方法最大的缺點(diǎn)。為了減輕該缺點(diǎn)所帶來(lái)的不利因素,Q3、Q4可選輸出電容較小的功率管如IGBT。
6)在t3時(shí)刻之后電路工作過(guò)程和t0~t3時(shí)類(lèi)似,這里就不詳細(xì)分析了。
2、全范圍實(shí)現(xiàn)ZVS和ZCS的約束條件
由式(2)可以看到,在占空比一定時(shí),隔直電容Cb越小,UCbp越大,由式(6)可看到,變壓器漏感越小、ucbp越大,則環(huán)流時(shí)間越短,因而ZCS實(shí)現(xiàn)得越充分。將式(7)代入式(6),并設(shè)t12-t0=DT/2(D為占空比,T為開(kāi)關(guān)周期),則有
t2-t12=4CbL1/DT(8)
可見(jiàn)在電路參數(shù)固定的情況下,環(huán)流時(shí)間是一個(gè)固定值,不依賴(lài)于負(fù)載。實(shí)驗(yàn)也表明,適當(dāng)減小開(kāi)關(guān)頻率,從而使DT變大,可使環(huán)流時(shí)間t2-t12減小,有利于ZCS的實(shí)現(xiàn)。
由式(4)可看到C1、C2越大,超前橋臂由導(dǎo)通轉(zhuǎn)截止后,C2上電壓降到零的過(guò)渡時(shí)間越長(zhǎng),因而ZVS實(shí)現(xiàn)得越好。而且負(fù)載越輕(Ipo越小),過(guò)渡時(shí)間越長(zhǎng)。而移相控制由于超前橋臂上下兩個(gè)開(kāi)關(guān)管的導(dǎo)通基本是互補(bǔ)的,因此在輕載時(shí)很難實(shí)現(xiàn)開(kāi)關(guān)管的ZVS導(dǎo)通。而相比之下,有限雙極性控制方法就顯出它的優(yōu)越性。如當(dāng)Q1關(guān)斷后,Q2導(dǎo)通時(shí)刻由移相控制時(shí)的t12~t3時(shí)刻推后到了t3時(shí)刻,可以充分保證只有當(dāng)Q2的續(xù)流二極管導(dǎo)通后才使Q2導(dǎo)通,從而保證全范圍的ZVS。實(shí)驗(yàn)證明,在正確設(shè)計(jì)好電路參數(shù)后,超前橋臂的ZVS實(shí)現(xiàn)得相當(dāng)好。
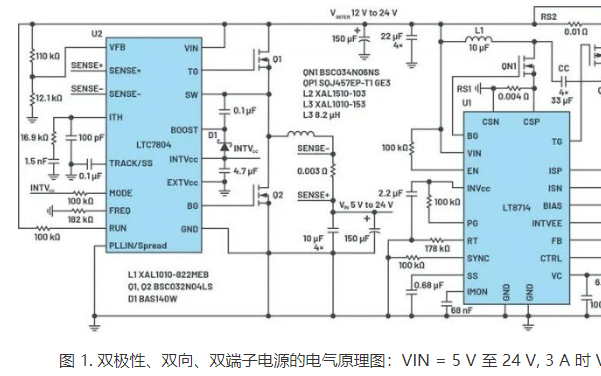
3、應(yīng)用實(shí)例
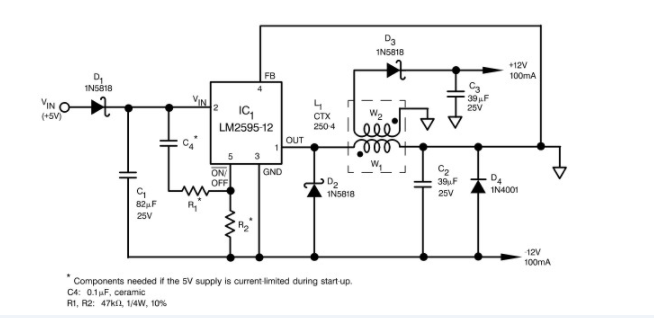
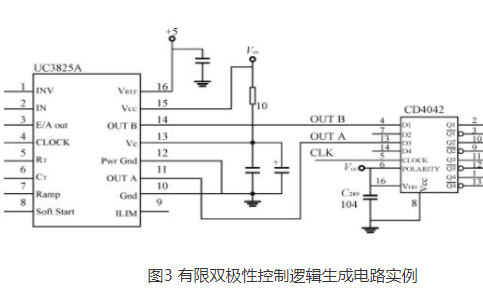
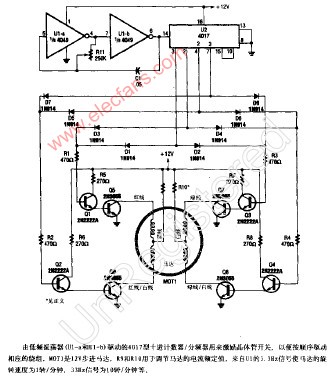
這種有限雙極性控制的ZVZCSPWM全橋變換器,已應(yīng)用到一種3kW(48V/50A)通信電源模塊的設(shè)計(jì)當(dāng)中。具體參數(shù)為:輸入220V/15A;輸出56.4V(最大)/53A(最大);開(kāi)關(guān)工作頻率60kHz;功率管為IRG4PC50W(高速型IGBT);變壓器原副方匝數(shù)比為24/4;輸出濾波電感40μH;輸出濾波電容5000μF。由于沒(méi)有專(zhuān)用的芯片,因此采用UC3825+CD4042合成所需要的邏輯。原理圖如圖3所示。
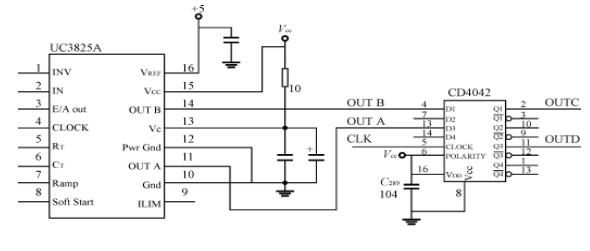
圖3 有限雙極性控制邏輯生成電路實(shí)例
UC3825A是一種峰值電流型控制芯片,在控制環(huán)路中加入電流環(huán)后,電源具有響應(yīng)速度快,保護(hù)迅速,源效應(yīng)和負(fù)載效應(yīng)好等優(yōu)點(diǎn)。模塊整機(jī)功率因數(shù)為0.99,效率90%,重約10kg。該產(chǎn)品已成功運(yùn)行于某移動(dòng)通信基站現(xiàn)場(chǎng)。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論