") 羅德與施瓦茨助力汽車高精度衛(wèi)星導(dǎo)航硬件在環(huán)HiL測試!
羅德與施瓦茨助力汽車高精度衛(wèi)星導(dǎo)航硬件在環(huán)HiL測試!

隨著無人駕駛汽車在汽車行業(yè)中變得越來越重要,傳統(tǒng)的衛(wèi)星導(dǎo)航定位精度大概在10米左右,不足以應(yīng)對(duì)自動(dòng)駕駛和車聯(lián)網(wǎng)V2X的場景。從目前的L2等級(jí)的高級(jí)駕駛輔助系統(tǒng) (ADAS) 到半自動(dòng)駕駛,再到未來的完全自動(dòng)駕駛 (AD),無人駕駛系統(tǒng)功能的復(fù)雜性正在急劇增加。相應(yīng)地,有兩個(gè)方面的重大挑戰(zhàn)。
挑戰(zhàn)一
衛(wèi)星導(dǎo)航硬件在環(huán)GNSS HiL
在各種可能的條件和變化下驗(yàn)證自動(dòng)駕駛和車聯(lián)網(wǎng)功能對(duì)汽車開發(fā)領(lǐng)域提出了重大挑戰(zhàn)。例如,自動(dòng)緊急制動(dòng) (AEB) 和自適應(yīng)巡航控制 (ACC) 之類的功能,甚至是在高速公路自動(dòng)駕駛條件下的全自動(dòng)功能,都需要在多種場景和車輛配置下,對(duì)車輛進(jìn)行大量的功能性和非功能性的驗(yàn)證和優(yōu)化。
目前,ADAS 和 AD 驗(yàn)證主要采用兩種方法:在公共道路或試驗(yàn)場上進(jìn)行駕駛測試和基于硬件在環(huán) (HiL)或者整車在環(huán)ViL的測試。
圖1:自動(dòng)駕駛汽車的硬件在環(huán)HiL和整車在環(huán)ViL測試平臺(tái)
挑戰(zhàn)二
高精度衛(wèi)星導(dǎo)航
GNSS市場在很多因素的驅(qū)動(dòng)下正在快速發(fā)展,由于車聯(lián)網(wǎng)市場、無人駕駛的出現(xiàn),車載導(dǎo)航的要求也在不斷增加,從最初的標(biāo)準(zhǔn)定位SPS(Standard Positioning System)需求,發(fā)展到現(xiàn)在的高精度定位PPS(Precise Positioning System)需求。
實(shí)時(shí)衛(wèi)星導(dǎo)航模擬器

圖2:R&S SMBV100B(左)與 SMW200A(右)
SMBV100B和SMW200A是高性價(jià)比的通用矢量信號(hào)發(fā)生器,具備優(yōu)異的射頻指標(biāo),支持幾乎所有的通信和廣播標(biāo)準(zhǔn),通過配置一個(gè)或多個(gè)可選選件,支持 GPS、Glonass、Galileo和BeiDou,是全能衛(wèi)星導(dǎo)航模擬器。
R&S衛(wèi)星導(dǎo)航模擬器為接收機(jī)測試提供了強(qiáng)大和可靠的單表解決方案,它們提供了以下關(guān)鍵特性:
實(shí)時(shí)衛(wèi)星導(dǎo)航模擬器,支持GNSS所有頻段,包括:L1/L2和L5,且可單臺(tái)儀表同時(shí)產(chǎn)生所有頻段導(dǎo)航信號(hào);
SMBV最多可支持至102顆衛(wèi)星,SMW最多可支持至612顆衛(wèi)星;
模擬器支持自定義或預(yù)定義的地理位置等多種軌跡文件;
支持實(shí)時(shí)HiL仿真,數(shù)據(jù)更新率高達(dá)100Hz;
可模擬動(dòng)態(tài)場景下的遮擋效應(yīng)和靜態(tài)場景下的多徑效應(yīng);
支持大氣層等場景模型;
單表解決方案:無需外部軟件或外部電腦。
通用汽車衛(wèi)星導(dǎo)航接收機(jī)測試解決方案
通用汽車衛(wèi)星導(dǎo)航接收機(jī)測試方法
如果車載導(dǎo)航接收機(jī)或模塊本身可以直接通過射頻線纜直連,同時(shí),提供串口的NMEA數(shù)據(jù)輸出,則可以直接進(jìn)行直連測試。此方式的優(yōu)勢(shì)是精確控制功率和屏蔽外界干擾。如果車載導(dǎo)航接收機(jī)已經(jīng)做成成品了,無法提供射頻接口直連的方式,則可以使用OTA的空口測試方法。如下圖所示:
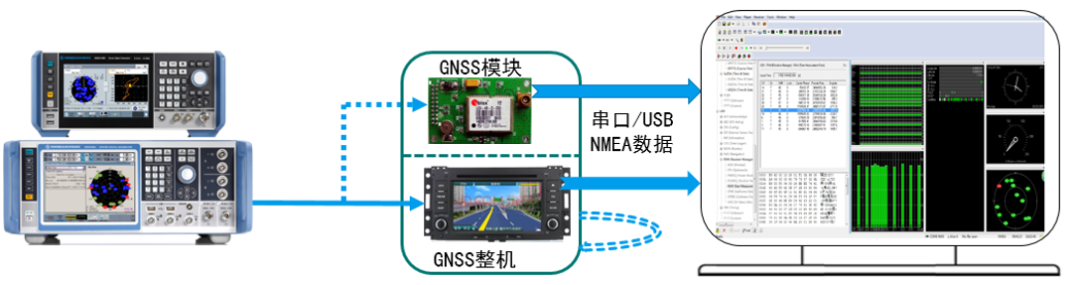
圖3:車載導(dǎo)航接收機(jī)直連測試方框圖
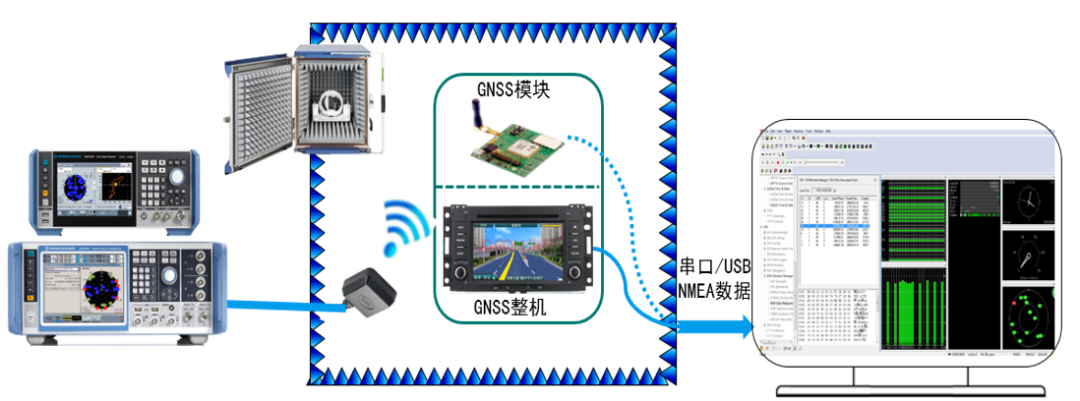
圖4:OTA測試方框圖
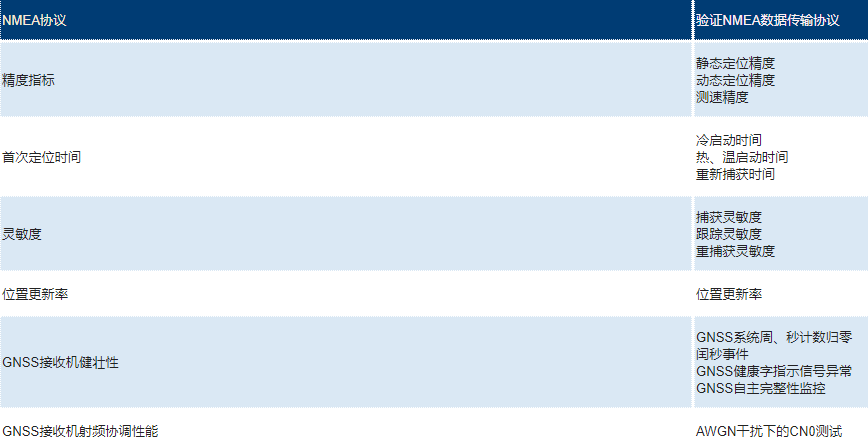
汽車導(dǎo)航接收機(jī)測試項(xiàng)目
GNSS高精度衛(wèi)星導(dǎo)航測試解決方案
GNSS多頻導(dǎo)航接收機(jī)測試方案
GNSS多頻接收機(jī)可同時(shí)接收同一個(gè)導(dǎo)航信號(hào)多個(gè)頻率的載波信號(hào)。利用多頻載波信號(hào)受電離層延遲影響的差異性,可以消除電離層對(duì)電磁波信號(hào)的延遲的影響。因此,GNSS多頻接收機(jī)可用于長距離精密相對(duì)定位。另外,GNSS多頻接收機(jī)借助于在兩個(gè)頻率上或多個(gè)頻率上的觀測可加速整周模糊度的解算。
SMW200A或SMBV100B都可單臺(tái)儀表實(shí)現(xiàn)多頻信號(hào)產(chǎn)生,如下圖所示,通過SMBV100B實(shí)現(xiàn)L1/L2/L5任意頻率組合方式的測試框圖:

圖5:雙頻(L1+L2/L5)接收機(jī)或多頻(L1+L2+L5)測試框圖
載波相位實(shí)時(shí)動(dòng)態(tài)差分接收機(jī)RTK測試
載波相位動(dòng)態(tài)實(shí)時(shí)接收機(jī)RTK:Real - Time Kinematic。是實(shí)時(shí)處理兩個(gè)測量站載波相位觀測量的差分方法,將基準(zhǔn)站采集的載波相位發(fā)給用戶接收機(jī),進(jìn)行求差解算坐標(biāo)。
此類接收機(jī),本身就是具備高精度定位功能,大多數(shù)都會(huì)采用雙頻/多頻接收機(jī)的定位方式,目的是提高定位精度。同時(shí),在校正數(shù)據(jù)的傳輸過程中,有私有網(wǎng)絡(luò)和公有網(wǎng)絡(luò),私有網(wǎng)絡(luò)主要是通過ASK/FSK/WLAN的通信方式,大多工作在ISM頻段,如433MHz。公有網(wǎng)絡(luò)大多是基于運(yùn)營商的移動(dòng)通信網(wǎng)絡(luò),如:GSM、LTE等。其測試框圖如下:
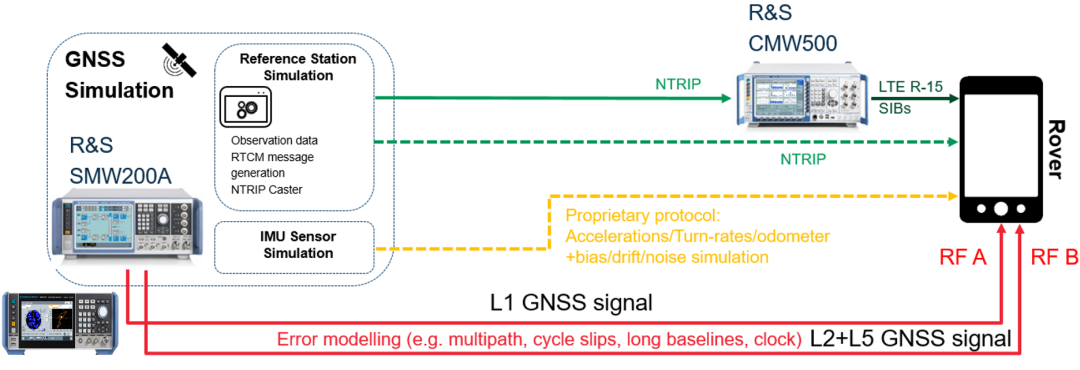
圖6:DNSS/RTK接收機(jī)測試框圖
汽車導(dǎo)航硬件在環(huán)HiL測試
硬件在環(huán)是一種測試方法,其中,被測設(shè)備或系統(tǒng)(DUT或SUT)被嵌入到模擬器系統(tǒng)中,該模擬器系統(tǒng)主要實(shí)時(shí)地模擬設(shè)備或系統(tǒng)的真實(shí)環(huán)境,允許在閉環(huán)中實(shí)時(shí)評(píng)估其在整個(gè)系統(tǒng)中的性能。HIL測試中的一部分是GNSS衛(wèi)星信號(hào)的仿真。為此,使用了GNSS模擬器,例如R&S SMBVB或SMW,如下圖所示:
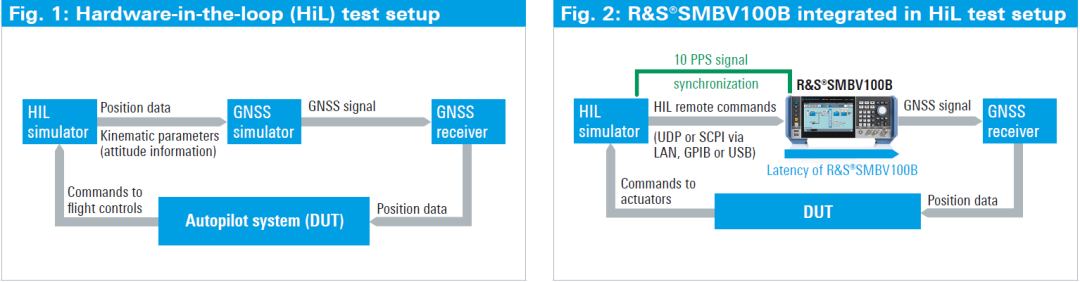
圖7:GNSS硬件在環(huán)HiL測試框圖
所有R&S GNSS模擬器都可以實(shí)時(shí)進(jìn)行遠(yuǎn)程控制,可以集成到動(dòng)態(tài)HIL環(huán)境中。在GNSS HIL仿真器中可指示位置數(shù)據(jù)和動(dòng)力學(xué)參數(shù),例如速度,加速度和加加速度,而GNSS模擬器可實(shí)時(shí)且無信號(hào)中斷地調(diào)整仿真的運(yùn)動(dòng),還可處理HiL仿真的車輛姿態(tài)信息,例如俯仰,側(cè)傾和偏航值。在HIL應(yīng)用中,SMBV和SMW高達(dá)100Hz的數(shù)據(jù)更新率以及低至 20 ms 的處理延遲共同保障了高處理效率和信號(hào)精度。
車載導(dǎo)航自動(dòng)化測試
R&S SMBV100B/SMW200A都支持自動(dòng)化測試,可以在操作界面手動(dòng)控制或遠(yuǎn)程控制。遠(yuǎn)程控制需要在上位機(jī)通過LAN、GPIB或USB連接SMBV。測試方案如下:
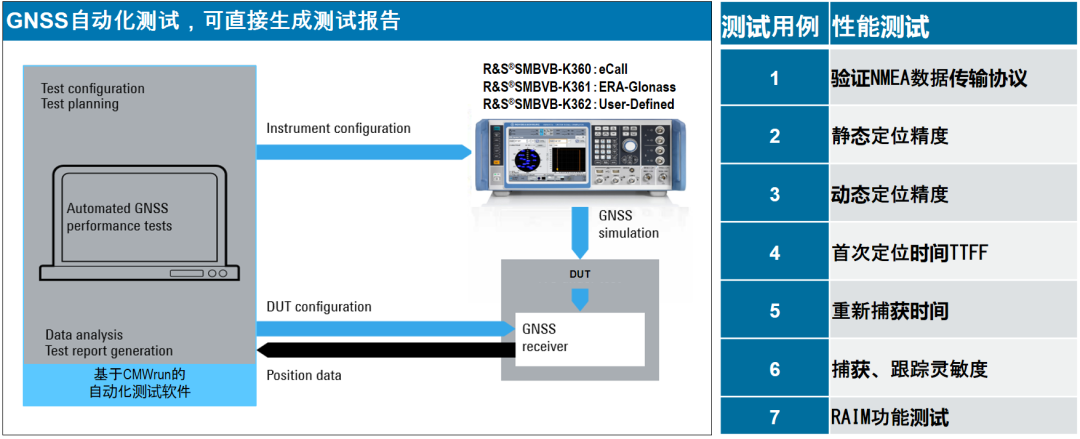
圖8:車載導(dǎo)航接收機(jī)自動(dòng)化測試框圖
結(jié)語
本文描述了利用GNSS衛(wèi)星導(dǎo)航模擬器進(jìn)行的一系列典型車載導(dǎo)航接收機(jī)驗(yàn)證測試,涉及內(nèi)容從基本的衛(wèi)星導(dǎo)航定位測試、高精度衛(wèi)星導(dǎo)航定位測試到車載衛(wèi)星導(dǎo)航硬件在環(huán)HiL測試方案。在GNSS接收機(jī)測試環(huán)境中使用的標(biāo)準(zhǔn)GNSS信號(hào)仿真器可為工程師提供最大的靈活性,幫助他們實(shí)施調(diào)整和控制,輕松地進(jìn)行重復(fù)測試。
在這個(gè)環(huán)境中,本文中列出的測試將為車載導(dǎo)航接收機(jī)的測試和驗(yàn)證創(chuàng)建一個(gè)標(biāo)準(zhǔn)驗(yàn)證流程。靈活的信號(hào)源不僅支持GNSS接收機(jī)測試,還支持其他無線制式和標(biāo)準(zhǔn)測試。
編輯:jq
-
衛(wèi)星導(dǎo)航
+關(guān)注
關(guān)注
3文章
247瀏覽量
27401 -
車聯(lián)網(wǎng)
+關(guān)注
關(guān)注
76文章
2653瀏覽量
92666 -
GNSS
+關(guān)注
關(guān)注
9文章
870瀏覽量
49297 -
無人駕駛汽車
+關(guān)注
關(guān)注
17文章
151瀏覽量
37894
原文標(biāo)題:羅德與施瓦茨助力汽車高精度衛(wèi)星導(dǎo)航硬件在環(huán)HiL測試
文章出處:【微信號(hào):羅德與施瓦茨中國,微信公眾號(hào):羅德與施瓦茨中國】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
羅德與施瓦茨全域智聯(lián)臻享快閃展廳亮點(diǎn)搶先看
羅德與施瓦茨邀您相約2025世界雷達(dá)博覽會(huì)

羅德與施瓦茨助力Telesat Lightspeed低軌衛(wèi)星網(wǎng)絡(luò)優(yōu)化
羅德與施瓦茨邀您相約第四屆民航技術(shù)裝備及服務(wù)展
羅德與施瓦茨升級(jí)ELEKTRA EMC測試軟件
羅德與施瓦茨和村田推出NB-NTN語音測試平臺(tái)
羅德與施瓦茨示波器在電源紋波測量中的應(yīng)用與技巧

羅德與施瓦茨與u-blox合作驗(yàn)證最新汽車GNSS模塊
羅德與施瓦茨推出CMX500 AI腳本助手

羅德與施瓦茨測試技術(shù)網(wǎng)絡(luò)研討會(huì)回顧
羅德與施瓦茨 FSU8 頻譜分析儀
羅德與施瓦茨AREG-P解決方案提高汽車雷達(dá)生產(chǎn)效率
羅德與施瓦茨RTB2002示波器測市電

羅德與施瓦茨示波器參數(shù)設(shè)置指南






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論