") 相機(jī)標(biāo)定含義(解決什么是相機(jī)標(biāo)定)
相機(jī)標(biāo)定含義(解決什么是相機(jī)標(biāo)定)

相機(jī)標(biāo)定含義(解決什么是相機(jī)標(biāo)定)
在圖像測(cè)量過(guò)程以及機(jī)器視覺(jué)應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。
在大多數(shù)條件下這些參數(shù)必須通過(guò)實(shí)驗(yàn)與計(jì)算才能得到,這個(gè)求解參數(shù)的過(guò)程就稱(chēng)之為相機(jī)標(biāo)定(或攝像機(jī)標(biāo)定)。
相機(jī)標(biāo)定意義(解決為什么要進(jìn)行相機(jī)標(biāo)定)
計(jì)算機(jī)視覺(jué)的基本任務(wù)之一是從攝像機(jī)獲取的圖像信息出發(fā)計(jì)算三維空間中物體的幾何信息,并由此重建和識(shí)別物體,而空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定的,這些幾何模型參數(shù)就是攝像機(jī)參數(shù)。

在大多數(shù)條件下,這些參數(shù)必須通過(guò)實(shí)驗(yàn)與計(jì)算才能得到。無(wú)論是在圖像測(cè)量或者機(jī)器視覺(jué)應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
因此,做好相機(jī)標(biāo)定是做好后續(xù)工作的前提,提高標(biāo)定精度是科研工作的重點(diǎn)所在。
常用相機(jī)標(biāo)定的方法
相機(jī)標(biāo)定方法有:傳統(tǒng)相機(jī)標(biāo)定法、主動(dòng)視覺(jué)相機(jī)標(biāo)定方法、相機(jī)自標(biāo)定法。
攝像機(jī)相對(duì)于世界坐標(biāo)系的方位。標(biāo)定精度的大小,直接影響著計(jì)算機(jī)視覺(jué)(機(jī)器視覺(jué))的精度。
迄今為止,對(duì)于攝像機(jī)標(biāo)定問(wèn)題已提出了很多方法,攝像機(jī)標(biāo)定的理論問(wèn)題已得到較好的解決,對(duì)攝像機(jī)標(biāo)定的研究來(lái)說(shuō),當(dāng)前的研究工作應(yīng)該集中在如何針對(duì)具體的實(shí)際應(yīng)用問(wèn)題,采用特定的簡(jiǎn)便、實(shí)用、快速、準(zhǔn)確的標(biāo)定方法。
傳統(tǒng)的標(biāo)定方法這里不再贅述,相機(jī)坐標(biāo)系轉(zhuǎn)換如下:
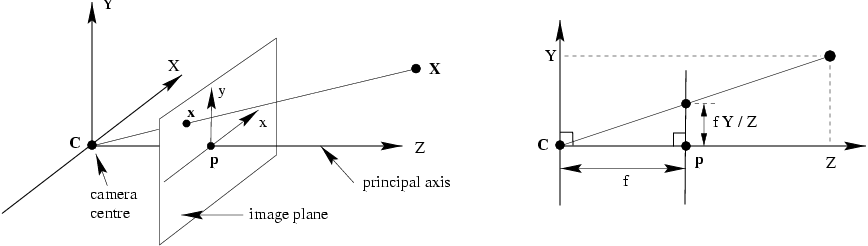
相機(jī)坐標(biāo)系是以 X ,Y,Z三個(gè)軸組成的且原點(diǎn)在 C點(diǎn);
像平面坐標(biāo)系是以 x,y兩個(gè)軸組成的且原點(diǎn)在 p 點(diǎn);
圖像坐標(biāo)系一般指圖片相對(duì)坐標(biāo)系,在這里可以認(rèn)為和像平面坐標(biāo)系在一個(gè)平面上。
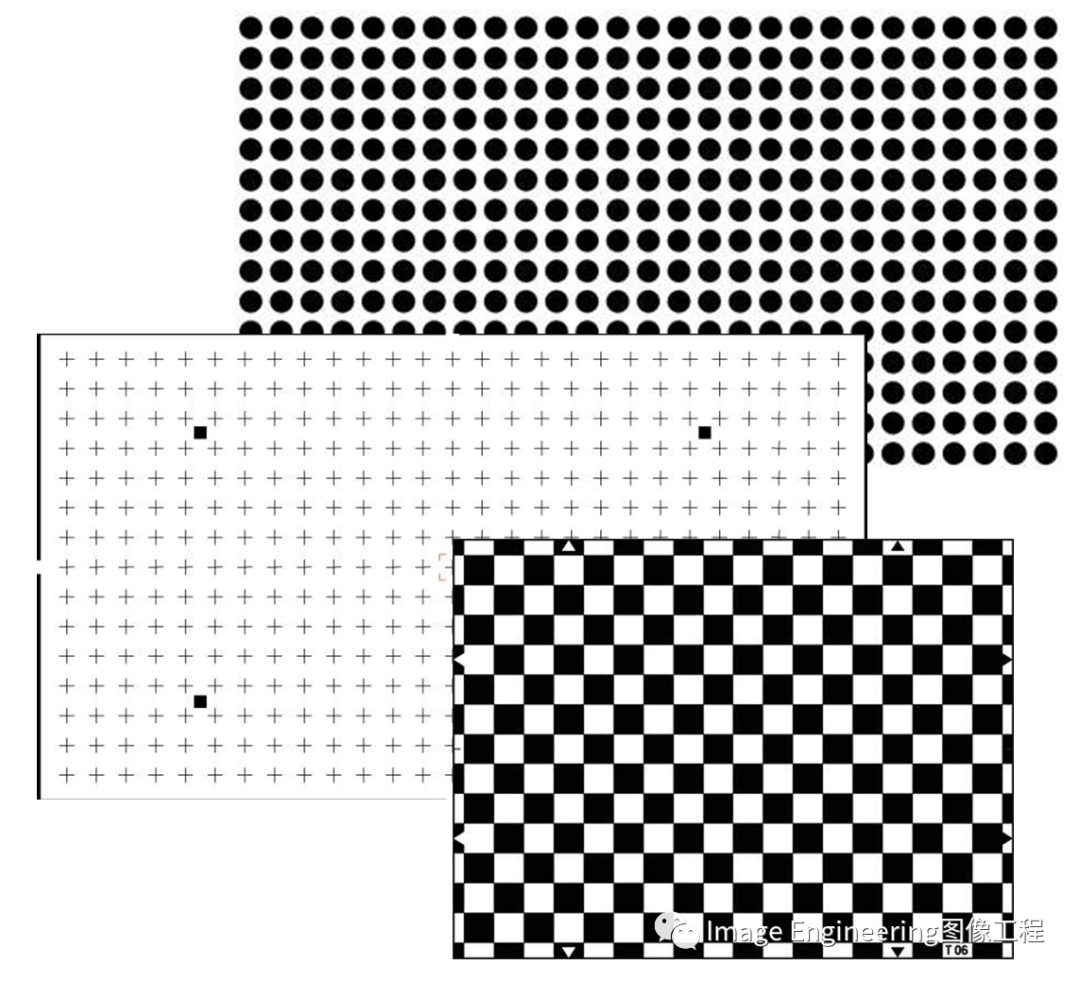
使用衍射光DOE設(shè)備提出相機(jī)標(biāo)定的新維度,通過(guò)平移不變的特性,只需一張圖片即可進(jìn)行標(biāo)定。
為了在機(jī)器視覺(jué)中使用基于相機(jī)的測(cè)量,高精度幾何相機(jī)校準(zhǔn)是絕對(duì)必要的。目標(biāo)是確定將 3D 世界坐標(biāo)映射到 2D 圖像坐標(biāo)所需的內(nèi)部相機(jī)參數(shù)。
常見(jiàn)的方法是使用預(yù)定義的校準(zhǔn)網(wǎng)格進(jìn)行攝影測(cè)量校準(zhǔn) d和r,再通過(guò)最小化非線(xiàn)性誤差函數(shù)來(lái)估計(jì)相機(jī)參數(shù)需要多個(gè)不同方向的觀測(cè)。
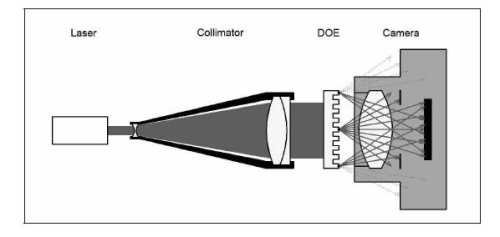
由于有限的網(wǎng)格大小,該技術(shù)或多或少限于近距離相機(jī)校準(zhǔn)。另一種適用于遠(yuǎn)場(chǎng)相機(jī)校準(zhǔn)的方法使用準(zhǔn)直儀-測(cè)角儀布置來(lái)照亮一組單個(gè)像素 ( n × m)。知道準(zhǔn)直光的方向,就可以估計(jì)相機(jī)參數(shù)d和投影d',他們提供了對(duì)相機(jī)校準(zhǔn)關(guān)鍵發(fā)展的更全面總結(jié)。
此處報(bào)告的校準(zhǔn)程序結(jié)合了校準(zhǔn)網(wǎng)格排列和單像素照明的特殊優(yōu)勢(shì)。通過(guò)使用衍射光學(xué)元件作為分束器,只需要一張具有n × m衍射點(diǎn)的圖像來(lái)估計(jì)內(nèi)部相機(jī)參數(shù)。
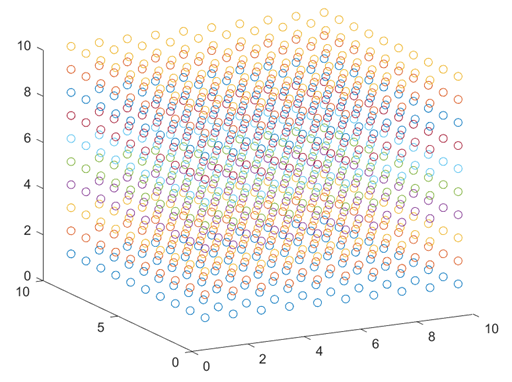
衍射光學(xué)元件 (DOE) 可用于將波長(zhǎng)為λ的入射激光束分成許多具有眾所周知的傳播方向的光束。由于傳感器上的圖像是夫瑯禾費(fèi)衍射圖案,因此每個(gè)投影圖像點(diǎn)代表無(wú)窮遠(yuǎn)處的一個(gè)點(diǎn),在 3D 投影空間 P 3 中由齊次坐標(biāo)d =[ X , Y , Z ,0] T 表示,其中

(1)
f=(fx,fy)表示在 DOE 中編碼的空間頻率。
上面公式僅當(dāng)入射光波是具有均勻強(qiáng)度分布的平面波時(shí)才有效,完全垂直于 DOE 表面。在實(shí)際設(shè)置中,光束的延伸是有限的,并且通常具有不均勻的強(qiáng)度分布,通常是高斯分布。此外,很難避免 DOE 相對(duì)于入射光束的輕微傾斜。
加入入射角度進(jìn)行計(jì)算

(2)
用角α和β在準(zhǔn)直器坐標(biāo)系下旋轉(zhuǎn)DOE坐標(biāo)系的x軸和y軸。衍射光束的方向現(xiàn)在得到如下

(3)
在DOE坐標(biāo)系中,通過(guò)簡(jiǎn)單的矩陣運(yùn)算直接計(jì)算衍射光束的方向,因此我們將省略由此得到的有些冗長(zhǎng)的表達(dá)式。
為了將光束方向轉(zhuǎn)換為攝像機(jī)坐標(biāo)系,需要考慮攝像機(jī)在DOE坐標(biāo)系下的外部方向:
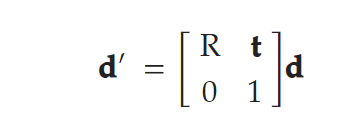
(4)
其中 R 是定義相機(jī)方向的 3×3 旋轉(zhuǎn)矩陣,t是相機(jī)位置的平移向量。公式(4)表明,無(wú)限遠(yuǎn)理想點(diǎn)的映射對(duì)于平移是不變的,這是計(jì)算步驟的必要條件。與經(jīng)典校準(zhǔn)網(wǎng)格相比,這也是一個(gè)很大的優(yōu)勢(shì),因?yàn)橹恍枰粡垐D像就足以校準(zhǔn),因此需要估計(jì)的參數(shù)更少。
相機(jī)對(duì)衍射光DOE拍攝實(shí)例
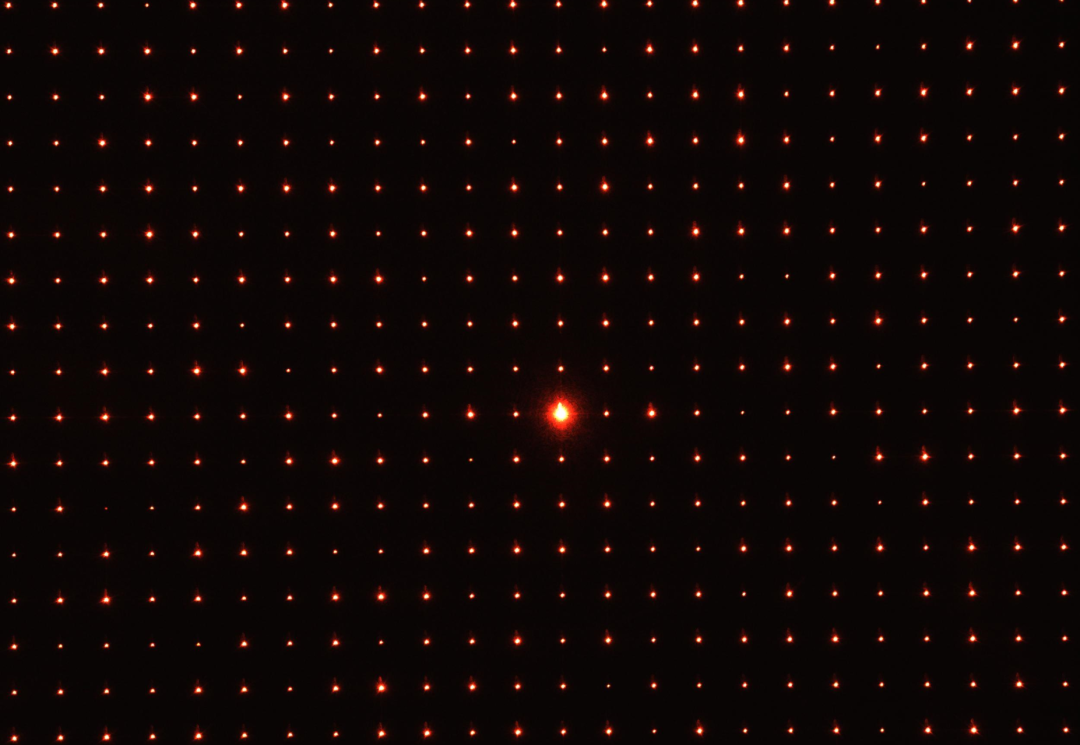
這里描述了一種幾何傳感器校準(zhǔn)的新方法,該方法使用定制的衍射光學(xué)元件作為具有精確已知衍射角的分束器。由于衍射光束的虛擬源是無(wú)限遠(yuǎn)的點(diǎn),因此被成像的物體類(lèi)似于星空,這使得圖像具有平移不變性。
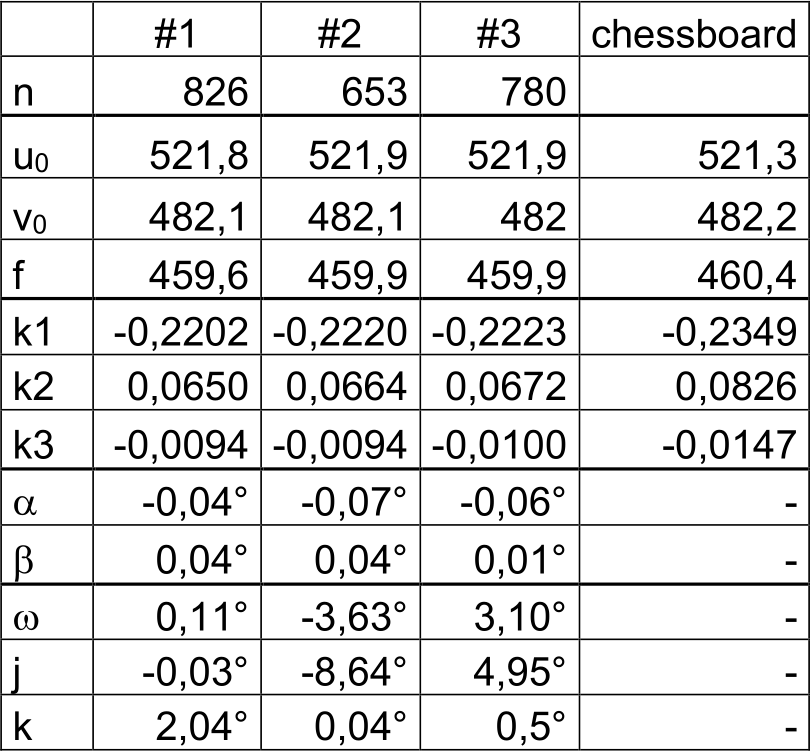
與棋盤(pán)格測(cè)量數(shù)據(jù)對(duì)比示例
這一特殊功能允許使用單個(gè)圖像進(jìn)行完整的相機(jī)校準(zhǔn),避免復(fù)雜的束調(diào)整,從而實(shí)現(xiàn)非常快速和可靠的校準(zhǔn)過(guò)程。
取得的結(jié)果與使用針孔相機(jī)模型和徑向畸變模型的經(jīng)典相機(jī)標(biāo)定一致。我們的分析中也包含了偏心失真,但結(jié)果沒(méi)有改善。
結(jié)果表明,可以獲得一個(gè)可靠的解決方案,它允許將內(nèi)部方向的參數(shù)與 DOE 的旋轉(zhuǎn)和相機(jī)的外部方向分開(kāi)。因此,校準(zhǔn)設(shè)置組件的復(fù)雜對(duì)準(zhǔn)不是必需的,這簡(jiǎn)化了校準(zhǔn)過(guò)程并且原則上允許現(xiàn)場(chǎng)校準(zhǔn)。
審核編輯 :李倩
-
相機(jī)
+關(guān)注
關(guān)注
4文章
1455瀏覽量
54572 -
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
163文章
4521瀏覽量
122583 -
計(jì)算機(jī)視覺(jué)
+關(guān)注
關(guān)注
9文章
1708瀏覽量
46661
原文標(biāo)題:相機(jī)標(biāo)定的意義
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
《聊一聊ZXDoc》之汽車(chē)標(biāo)定、臺(tái)架標(biāo)定、三高標(biāo)定

采用LifeCam運(yùn)行TIDA-00361_LCr3000程序進(jìn)行到投影儀標(biāo)定步驟,如何使LifeCam Cinema相機(jī)捕捉到投影儀投射的棋盤(pán)格圖像?
TIDEP0076相機(jī)無(wú)法正常調(diào)用怎么解決?
DLP_LightCrafter_4500_3D_Scan_Application軟件進(jìn)行相機(jī)和投影儀標(biāo)定時(shí),進(jìn)入相機(jī)拍照界面后程序未響應(yīng)然后退出怎么解決?
TIDA-00254使用SDK進(jìn)行物體點(diǎn)云重建時(shí)在系統(tǒng)標(biāo)定時(shí)DLP不打光,怎么解決?
肇觀電子首發(fā)自標(biāo)定3D深度相機(jī)

傳感器靜態(tài)標(biāo)定的主要步驟是什么
使用基于模型的標(biāo)定提高開(kāi)發(fā)效率
使用ina219測(cè)電流時(shí),要進(jìn)行標(biāo)定嗎?
基于CW32的儀表精度測(cè)量實(shí)現(xiàn)(三):標(biāo)定與校準(zhǔn)
基于DCC和張氏標(biāo)定的相機(jī)鏡頭畸變校正

工業(yè)相機(jī)測(cè)長(zhǎng)儀的組成部分
技術(shù)指南丨深視智能3D相機(jī)上下對(duì)射測(cè)厚操作流程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論