 稀疏光流跟蹤(KLT)算法詳解
稀疏光流跟蹤(KLT)算法詳解

稀疏光流跟蹤(KLT)詳解
在視頻移動對象跟蹤中,稀疏光流跟蹤是一種經典的對象跟蹤算法,可以繪制運動對象的跟蹤軌跡與運行方向,是一種簡單、實時高效的跟蹤算法,這個算法最早是有Bruce D. Lucas and Takeo Kanade兩位作者提出來的,所以又被稱為KLT。KLT算法工作有三個假設前提條件:
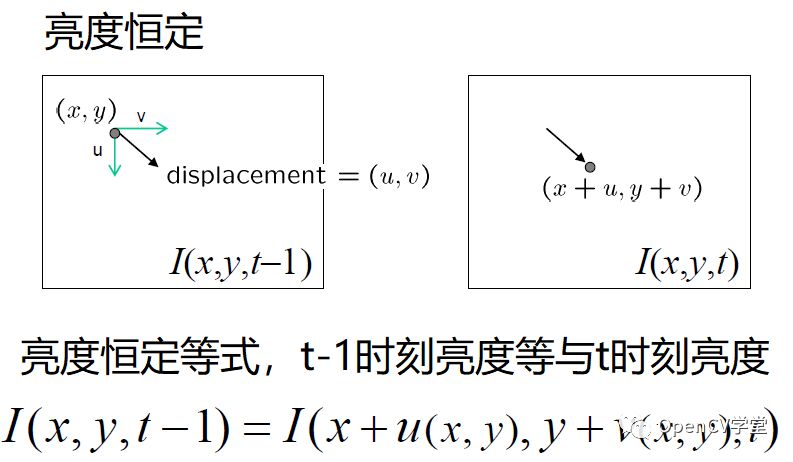
亮度恒定
短距離移動
空間一致性
亮度恒定
對象中任意像素點p(x,y)亮度值,在t-1時候的值,在t時刻移動(u, v)之后亮度值保持不變
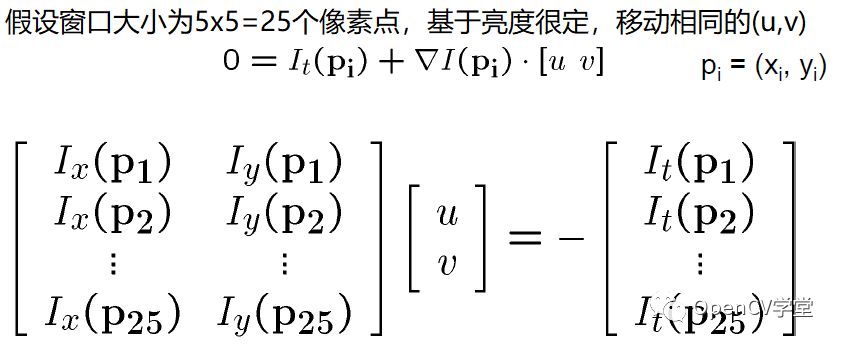
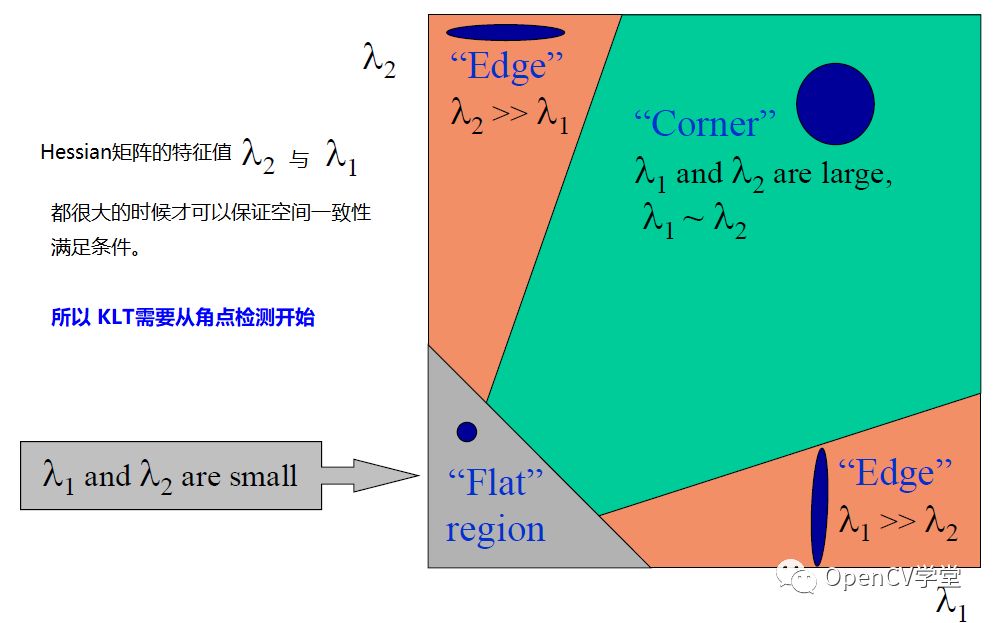
空間一致性
假設對像素點p(x, y)來說,周圍的像素點都保持相同的移動距離(u, v) 假設窗口大小為5x5,則對于25個窗口內的像素點來說,就會如下等式成立:
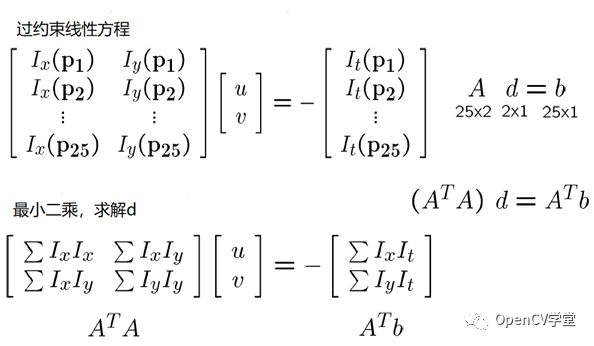
得到下面的過約束等式,根據最小二乘可以求解(u, v):
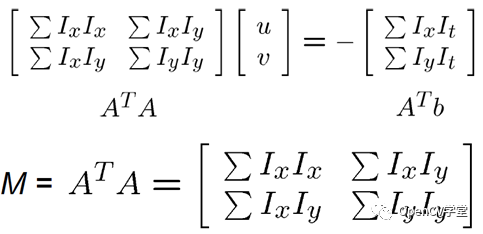
這樣我們就得到了KLT光流等式與該窗口的的Hessian矩陣
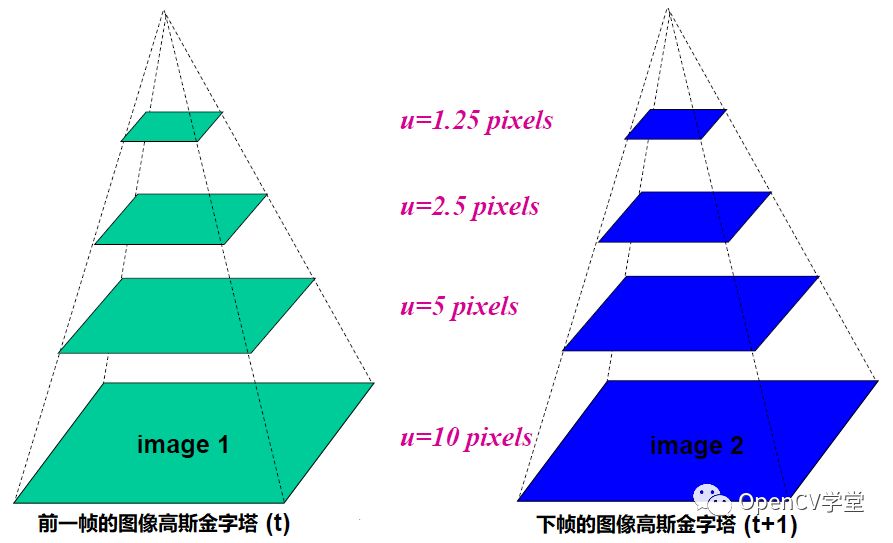
空間尺度不變性
通過建立每一幀的圖像金字塔,實現尺度空間窗口目標對象搜索
OpenCV中KLT演示代碼實現
OpenCV中KLT算法API及其參數解釋如下:
voidcv::calcOpticalFlowPyrLK( InputArrayprevImg,//前一幀圖像 InputArraynextImg,//后一幀圖像 InputArrayprevPts,//前一幀的稀疏光流點 InputOutputArraynextPts,//后一幀光流點 OutputArraystatus,//輸出狀態,1表示正常該點保留,否則丟棄 OutputArrayerr,//表示錯誤 SizewinSize=Size(21,21),//光流法對象窗口大小 intmaxLevel=3,//金字塔層數,0表示只檢測當前圖像,不構建金字塔圖像 TermCriteriacriteria=TermCriteria(TermCriteria::EPS,30,0.01),//窗口搜索時候停止條件 intflags=0,//操作標志 doubleminEigThreshold=1e-4//最小特征值響應,低于最小值不做處理 )
特征點檢測與繪制的代碼實現如下:
//detectfirstframeandfindcornersinit Matold_frame,old_gray; capture.read(old_frame); cvtColor(old_frame,old_gray,COLOR_BGR2GRAY); goodFeaturesToTrack(old_gray,featurePoints,maxCorners,qualityLevel,minDistance,Mat(),blockSize,useHarrisDetector,k);
特征點繪制
voiddraw_goodFeatures(Mat&image,vectorgoodFeatures){ for(size_tt=0;t
KLT跟蹤代碼如下
TermCriteriacriteria=TermCriteria(TermCriteria::COUNT+TermCriteria::EPS,30,0.01); doublederivlambda=0.5; intflags=0; boolret=capture.read(frame); if(!ret)break; imshow("frame",frame); roi.x=0; frame.copyTo(result(roi)); cvtColor(frame,gray,COLOR_BGR2GRAY); //calculateopticalflow calcOpticalFlowPyrLK(old_gray,gray,pts[0],pts[1],status,err,Size(31,31),3,criteria,derivlambda,flags);
特征點狀態檢查與匹配的代碼如下
size_ti,k; for(i=k=0;i2){ pts[0][k]=pts[0][i]; initPoints[k]=initPoints[i]; pts[1][k++]=pts[1][i]; circle(frame,pts[1][i],3,Scalar(0,255,0),-1,8); } } //resize有用特征點 pts[1].resize(k); pts[0].resize(k); initPoints.resize(k);
繪制跟蹤軌跡的代碼如下
//繪制跟蹤軌跡 draw_lines(frame,initPoints,pts[1]);
該方法實現如下:
voiddraw_lines(Mat&image,vectorpt1,vector pt2){ if(color_lut.size()
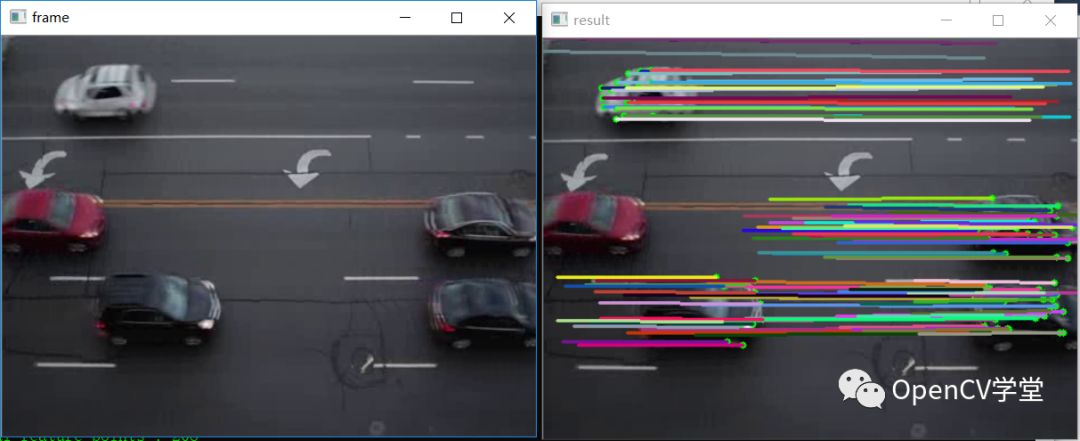
運行效果:
左側是視頻的原始每一幀、右側視頻是每一幀中KLT算法實時軌跡繪制
車輛運行軌跡跟蹤
審核編輯:劉清
-
跟蹤算法
+關注
關注
0文章
41瀏覽量
13145 -
OpenCV
+關注
關注
32文章
642瀏覽量
42604 -
KLT
+關注
關注
0文章
5瀏覽量
7509
原文標題:干貨 | OpenCV中KLT光流跟蹤原理詳解與代碼演示
文章出處:【微信號:CVSCHOOL,微信公眾號:OpenCV學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
同步電機在位置隨動系統中跟蹤誤差的分析與研究
SVPWM的原理及法則推導和控制算法詳解
光伏無人機巡檢系統功能詳解

DAC1280 TDATA引腳輸入的比特流,怎么產生這個比特流,算法是什么?
天合跟蹤受邀參加2024光伏行業年度大會
天合跟蹤AI賦能老電站新活力
Hi7200 高精度同步切光降壓 LED 恒流驅動器
視頻目標跟蹤從0到1,概念與方法


抖動跟蹤不丟失 慧視圖像跟蹤板和自研算法強勢升級

過零雙向可控硅驅動光耦KLT304X&KLT306X&KLT308X 產品規格書
隨機相位可控硅驅動光耦KLT302X&KLT305X 產品規格書






 工商網監
工商網監
評論