") MyCobot六軸機械臂開箱及開發(fā)前的準備工作(一)
MyCobot六軸機械臂開箱及開發(fā)前的準備工作(一)
MyCobot機械臂是一款入門級的六自由度機械臂,目前是國產(chǎn)機械臂中價格和性能十分優(yōu)良的機械臂,本講主要以MyCobot 280pi機臂的開箱搭建和開發(fā)前的準備工作為起點為小伙伴們詳細的介紹這款機械臂的搭建,開發(fā),代碼調(diào)試,及進階。
MyCobot消費級的機械臂有四種型號的機械臂,M5版本、Pi版本、Arduino版本、JN版本,這里我主要以樹莓派的Cobot作為我們教學(xué)的設(shè)備。
一:開箱
1、標準配置的設(shè)備開箱主要有以下幾個部件

2、固定機械臂
這里強烈建議初學(xué)者要定訂固定底座,因為你不可能每次運行的時侯都用手扶著,另外就是機械在運動的時候萬一掃到什么東西可能會給你帶來損失,所以機械臂的安裝盡量估算好周邊的距離,萬一你程序沒調(diào)好,他碰到東西可能會造成損失。
機械臂固定件有好幾種,我這里使用的是G型底座,直接卡在了桌子邊上。
一種是G型號底座,如圖

一種吸盤,如圖:

3、接線的方法
電源線接到這里

視頻接到這里

網(wǎng)線接到這里

把設(shè)備固定好,接好線我們就可以上電進行下一步工作了。
二、上電設(shè)置
開機后進入這個界面

開發(fā)前的準備工作,主要是設(shè)置我們的網(wǎng)絡(luò)、ssh、VNC、校準機械臂等工作,好的讓我們開始設(shè)置吧!
(1)網(wǎng)絡(luò)設(shè)置
網(wǎng)絡(luò)設(shè)置可以采用兩種試,一是wifi設(shè)置方法很簡單,如圖
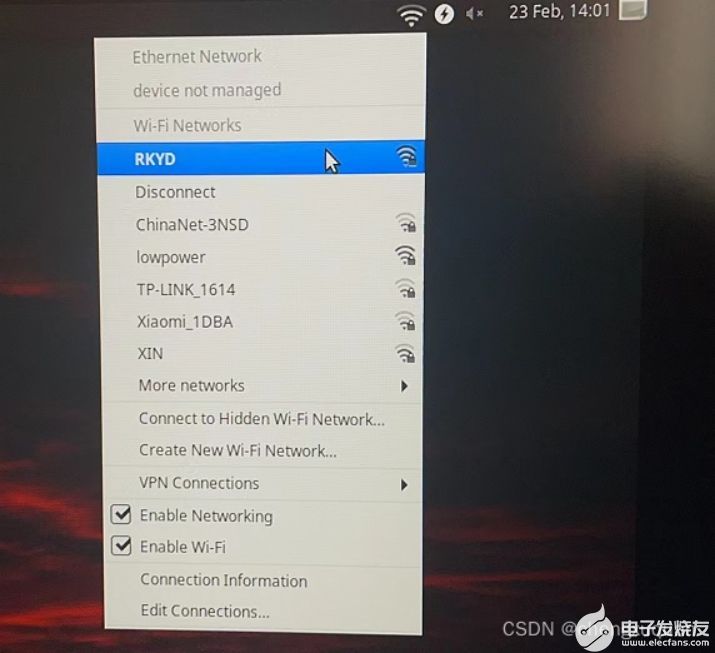
直接點擊右上角的網(wǎng)絡(luò)圖標,接入你需要接入的wifi即可。
第二種方法是用樹莓派的網(wǎng)卡,我們可以設(shè)置固定的IP,這樣IP就不會隨便更改,更適合我們的操作。
可以在終端命令行執(zhí)行如下指令:
sudo vim /etc/network/interfaces
注意這款機械臂使用的ubuntu的版本應(yīng)該是16.04,所以網(wǎng)絡(luò)配置你按16.04版本的網(wǎng)絡(luò)配置來做。
(2)打開ssh服務(wù)
打開一個終端界面,執(zhí)行:
sudo rasp-config
然后彈出如下界面:
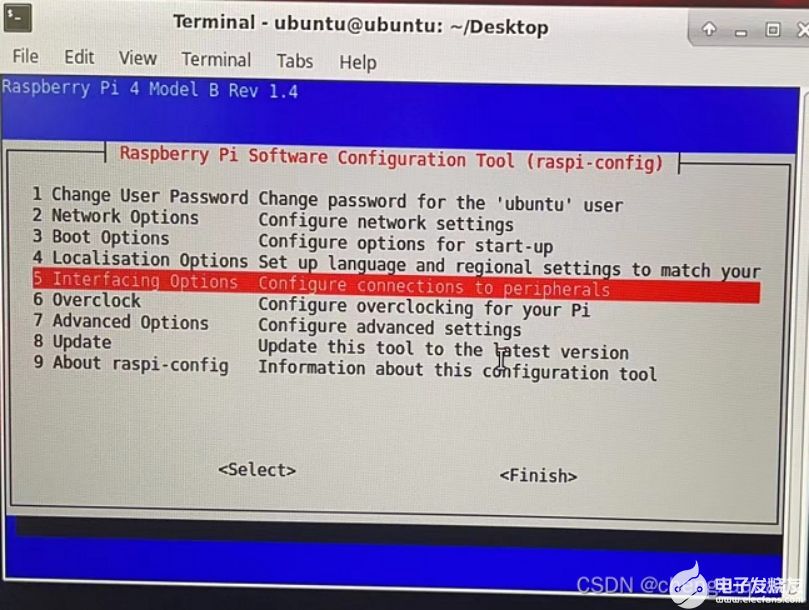
選擇Interfacing Options,進入下一個界面,選P2,SSH,然后啟動SSH,如圖
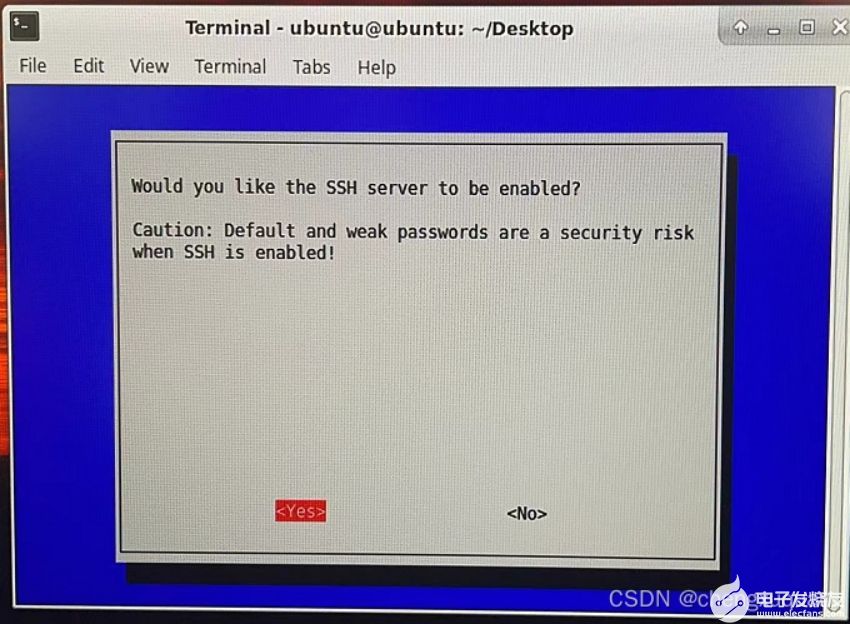
做完后按Finish退出。
安裝vim,本人試過vi編輯器,在此設(shè)備中不算好用,所以這里推薦使用vim,安裝方法是在終端界面執(zhí)行:
sudo apt install vim
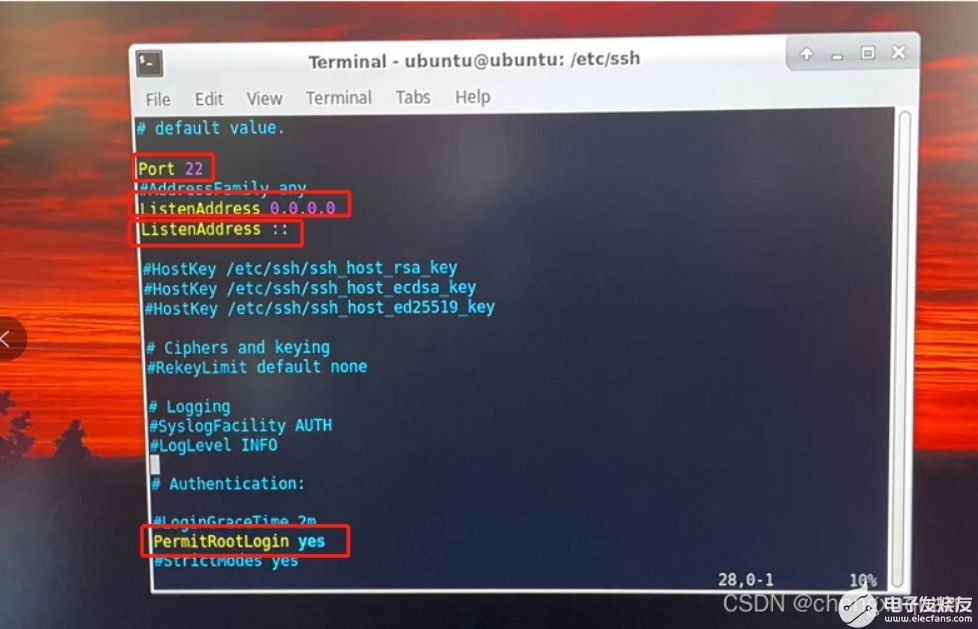
然后我們配置ssh-server
sudo vim /etc/ssh/sshd_config
修改以下幾項,并保存退出。
(3)打開VNC
這一步要先設(shè)置好root密碼,執(zhí)行如下指令:
sudo passwd root
為什么要這樣呢,因為打開vnc有可能無法再進入桌面,這時我們可以使用root指令,通過ssh進行操作。
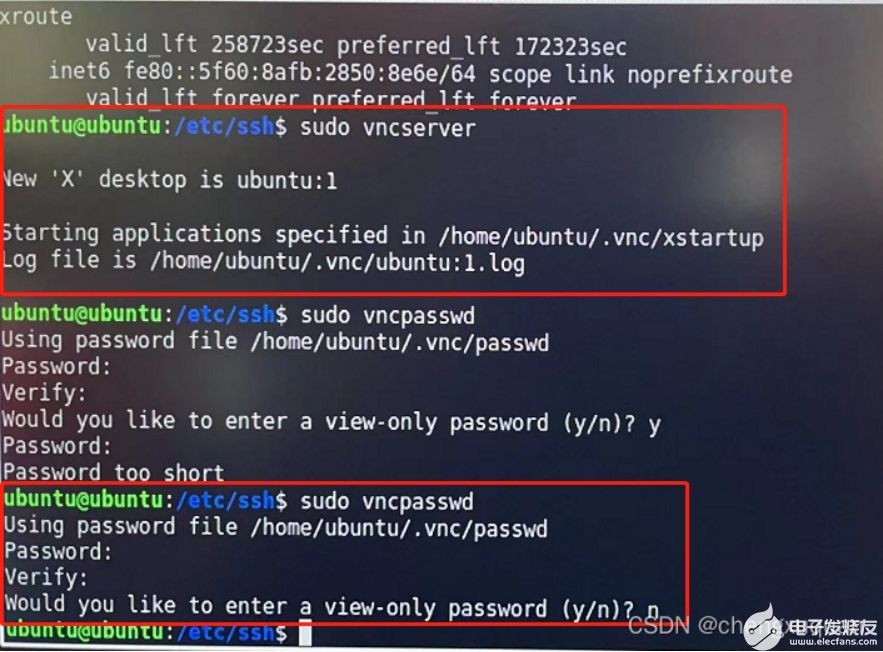
如何打開vnc呢,當(dāng)然可以通過sudo raspi-config,但我試過不行。這里必須使用指令打開,在終端執(zhí)行:
sudo vncserver
查看vnc是否啟動
ps -ef |grep vnc
設(shè)置vnc登錄密碼:
sudo vncpasswd
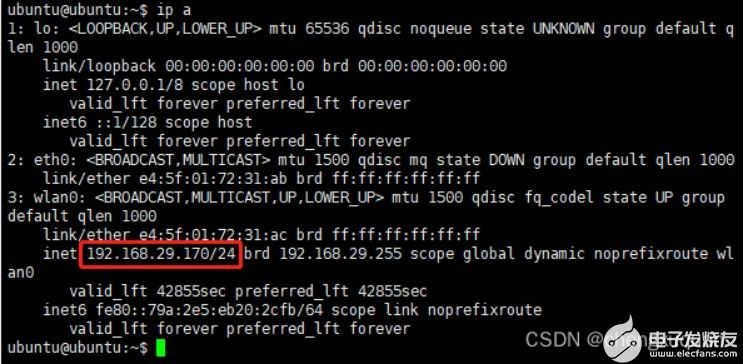
如果你是wifi連接的,重啟前,請終端執(zhí)行:
ip a
然后記住的登錄IP址:
當(dāng)然你也可以重新設(shè)置桌面用戶的密碼:
sudo passwd ubuntu
我這里設(shè)置的密碼同用戶名相同,僅為測試使用。
接下來我們重啟樹莓派。
解決問題一:
重啟后,不管用什么用戶名都無法登錄樹莓派了,反復(fù)提示登錄選項,這里主要的原因是因為vnc啟動時文件權(quán)限的問題,我們按CTRL+Alt+F1進行命令行,使用ubuntu登錄后,執(zhí)行如下指令:
sudo chown -R ubuntu:ubuntu /home/ubuntu/.ICEauthority
sudo chown -R ubuntu:ubuntu /home/ubuntu/.Xauthority
reboot
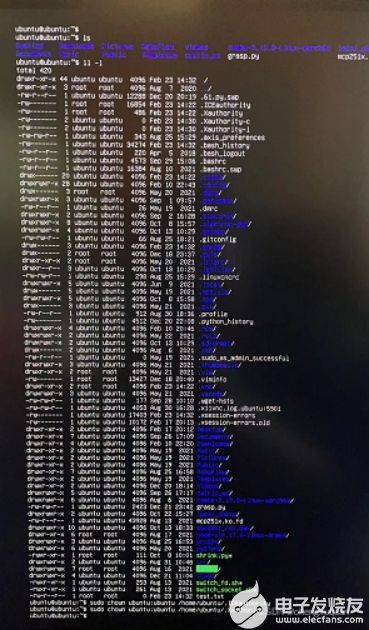
重啟后以上問題解決。
機械臂開發(fā)使用前的準備工作已做完了,接下來,讓我們開始學(xué)習(xí)下一篇《MyCobot基礎(chǔ)操作》。
審核編輯 黃昊宇
-
機器人
+關(guān)注
關(guān)注
213文章
29563瀏覽量
211927 -
機械臂
+關(guān)注
關(guān)注
13文章
547瀏覽量
25272 -
協(xié)作機器人
+關(guān)注
關(guān)注
2文章
512瀏覽量
30496
發(fā)布評論請先 登錄
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品


大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
大象機器人×進迭時空聯(lián)合發(fā)布全球首款RISC-V全棧開源小六軸機械臂

家里亂成“垃圾場”,樹莓派也能一鍵搞定家務(wù)了?

專為機器人教育而設(shè)計的創(chuàng)客友好型機械臂

如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結(jié)合ROS2系統(tǒng)搭建機械分揀站

焊接機器人六個軸分別是什么作用

配電室停電的準備工作和步驟
OrangePi AIpro應(yīng)用:機械臂應(yīng)用開發(fā)指南

開源六軸協(xié)作機器人myCobot 320結(jié)合人臉表情識別情緒!

大象機器人開源協(xié)作機械臂機械臂接入GPT4o大模型!

使用myCobot和OAK-D OpenCV DepthAI攝像頭制作一個可以在眼前始終享受視頻的手機支架!

【PHYTEC AM62x開發(fā)板試用】準備工作
- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論