") EtherCAT運動控制器中脈沖接口的快速調(diào)試與診斷
EtherCAT運動控制器中脈沖接口的快速調(diào)試與診斷

脈沖型驅(qū)動器試運行可借助ZDevelop軟件快速驗證,主要包含以下四個部分:硬件接線,ZDevelop連接控制器,配置軸參數(shù),發(fā)送運動命令查看電機(jī)是否轉(zhuǎn)動。若無法運行參見問題排查部分解決。
01脈沖軸驅(qū)動器試運行流程
一、硬件接線
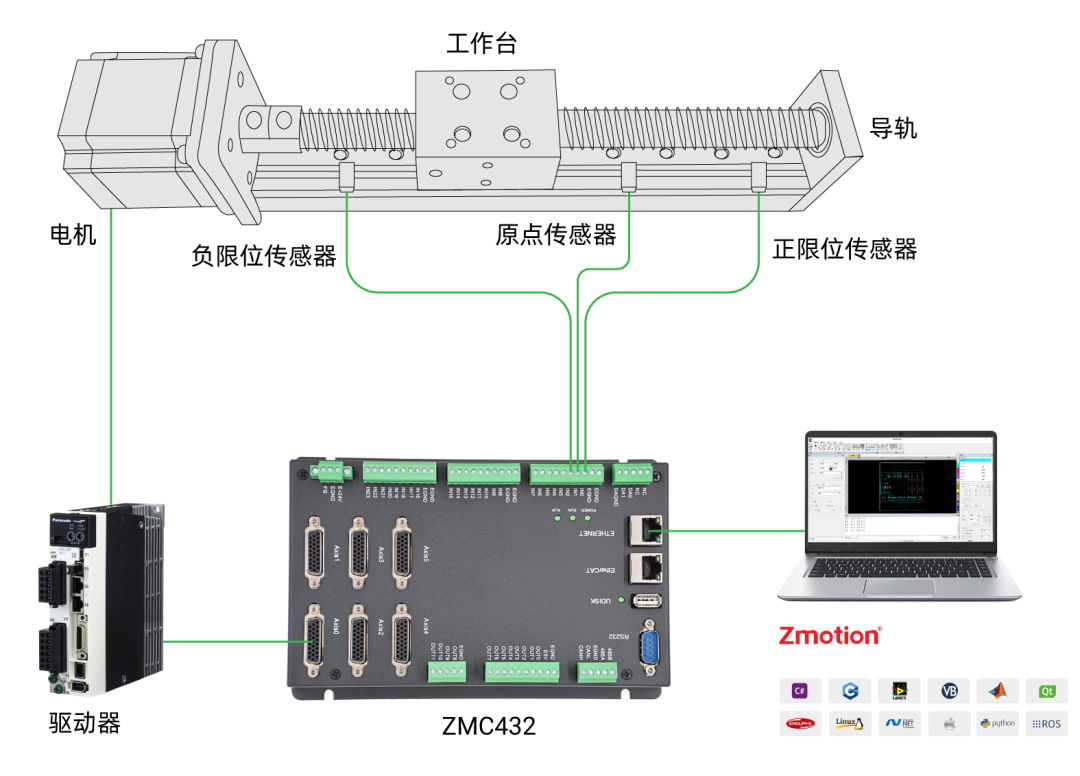
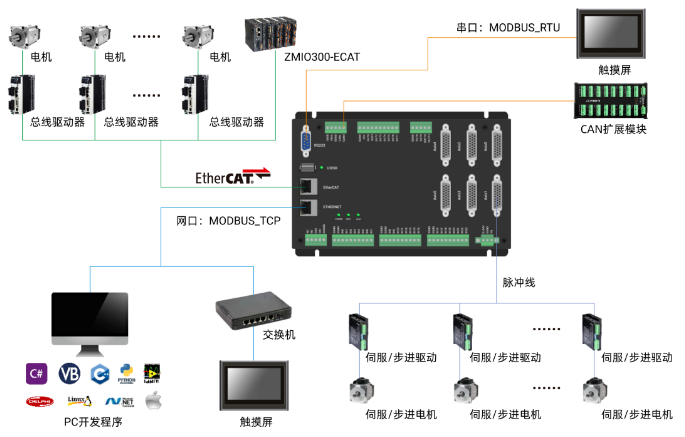
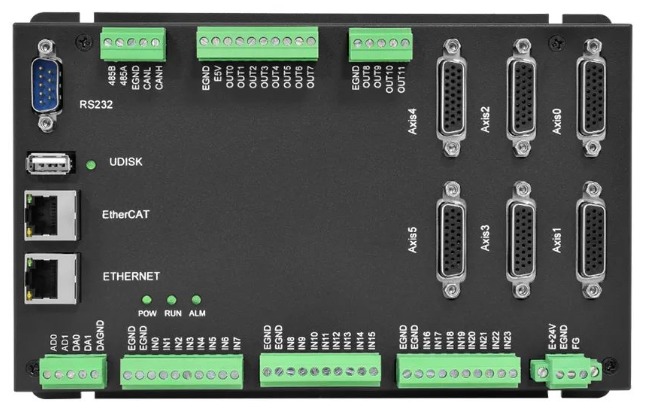
以ZMC432總線運動控制器為例,支持EtherCAT、EtherNET、RS232、RS485、CAN、U盤等通訊接口,觀察控制器上的硬件接口,控制器參考架構(gòu)如下圖。 可通過EtherNET網(wǎng)口或RS232串口連接到ZDevelop軟件完成試運行。 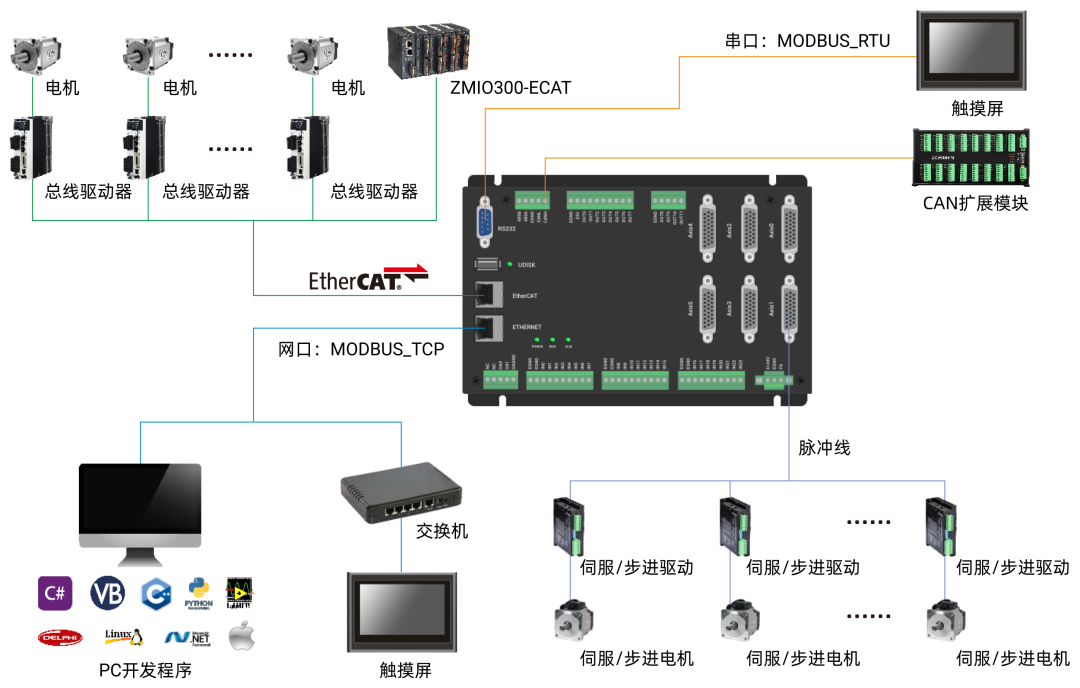 1.脈沖接口
1.脈沖接口
正運動技術(shù)大部分控制器的脈沖控制接口為面板上提供的DB26母頭的端子,例如下圖ZMC432的AXIS端子,板載6個脈沖軸的接口。
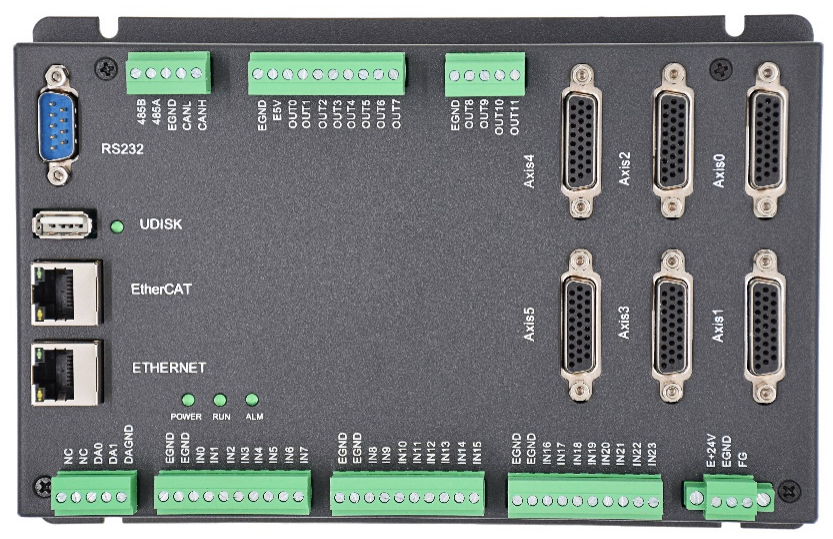
AIXS端子內(nèi)主要包含脈沖輸出的接線端子,編碼器反饋的接線端子,驅(qū)動器的使能和報警信號,5V電源輸出和公共端,如下表所示。
| 針腳號 | 信號 | 說明 |
| 1 | EGND | 外部電源地 |
| 2 | IN24-29/ALM | 通用輸入,建議做驅(qū)動報警 |
| 3 | OUT12-17/ENABLE | 通用輸出,建議驅(qū)動使能 |
| 4 | EA- | 編碼器輸入 |
| 5 | EB- | 編碼器輸入 |
| 6 | EZ- | 編碼器輸入 |
| 7 | +5V | 內(nèi)部電源+5v輸出 |
| 8 | 備用 | 備用 |
| 9 | DIR+ | 伺服或步進(jìn)方向輸出 |
| 10 | GND | 內(nèi)部電源地 |
| 11 | PUL- | 伺服或步進(jìn)脈沖輸出 |
| 12 | 備用 | 備用 |
| 13 | GND | 內(nèi)部電源地 |
| 14 | OVCC | 外部E+24V輸出(建議僅供伺服IO ) |
| 15 | 備用 | 備用 |
| 16 | 備用 | 備用 |
| 17 | EA+ | 編碼器輸入 |
| 18 | EB+ | 編碼器輸入 |
| 19 | EZ+ | 編碼器輸入 |
| 20 | GND | 內(nèi)部電源地 |
| 21 | GND | 內(nèi)部電源地 |
| 22 | DIR- | 伺服或步進(jìn)方向輸出 |
| 23 | PUL+ | 伺服或步進(jìn)脈沖輸出 |
| 24 | GND | 內(nèi)部電源地 |
| 25 | 備用 | 備用 |
| 26 | 備用 | 備用 |
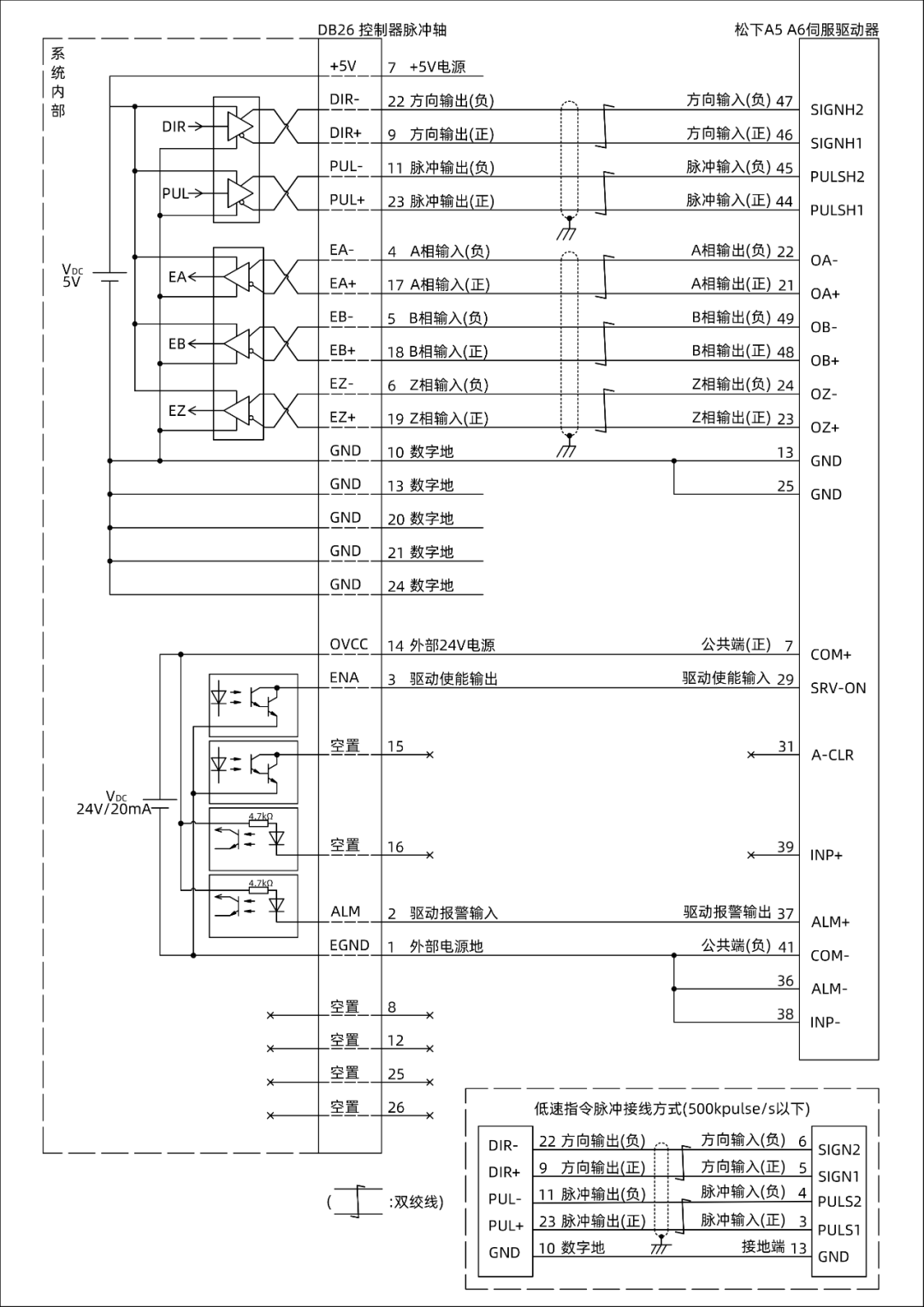
參考下圖完成控制器與驅(qū)動器的脈沖控制接線,采用了差分接法,脈沖輸出包含四個端子PUL+、PUL-、DIR+、DIR-,分別與驅(qū)動器一一對應(yīng)連接即可。 帶編碼器反饋的驅(qū)動設(shè)備,差分接線方式是將EA+、EA-、EB+、EB-、EZ+、EZ-分別連接編碼器。 再將針腳3接入驅(qū)動器的使能端子上,用于控制器給驅(qū)動器上使能信號。參考上圖。
AXIS 0 軸接口端子內(nèi)的使能信號為OUT12;
AXIS 1 軸接口端子內(nèi)的使能信號為OUT13;
依此類推。
使能操作:OP(12,ON),OP(13,ON)等。
驅(qū)動器報警信號通過針腳2傳入控制器,參考上圖。
AXIS 0 軸接口端子內(nèi)的報警信號為IN24;
AXIS 1 軸接口端子內(nèi)的報警信號為IN25;
依此類推。
驅(qū)動器報警輸入信號需要使用ALM_IN指令配置:ALM_IN(0)=24,ALM_IN(1)=25等。
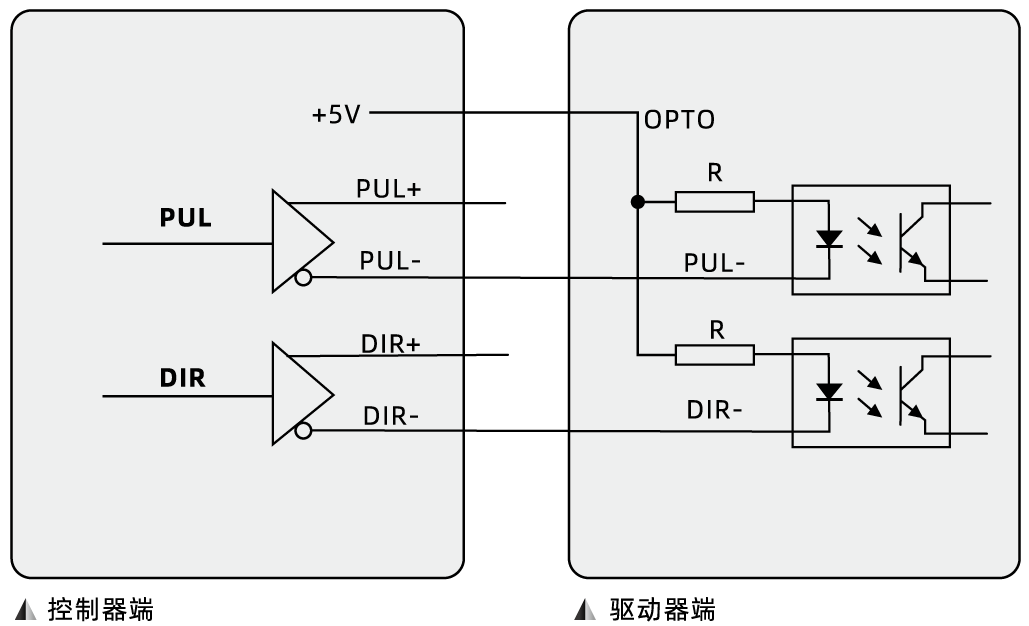
脈沖的單端連接方式如下圖,下圖采用共陽極的接法,將驅(qū)動器的公共端接入DB26提供的+5V端子上。
編碼器的單端接線圖如下,編碼器的A,B(無Z信號的型號只接AB兩相)與控制器正端子EA+、EB+一一對應(yīng)連接,控制器的負(fù)端子懸空,編碼器的0V或地線端子,連接控制器軸接口內(nèi)的GND端子即可,再按編碼器的供電要求接入電源。
2.IO接口
如下圖,ZMC432支持6路脈沖軸控制,IO口分普通IO口和高速IO口,普通IO口的響應(yīng)頻率為10KHz,高速IO口的響應(yīng)頻率為500KHz,ZMC432的高速IO口除了響應(yīng)更快之外,部分還集成了特殊功能,參見下文說明。
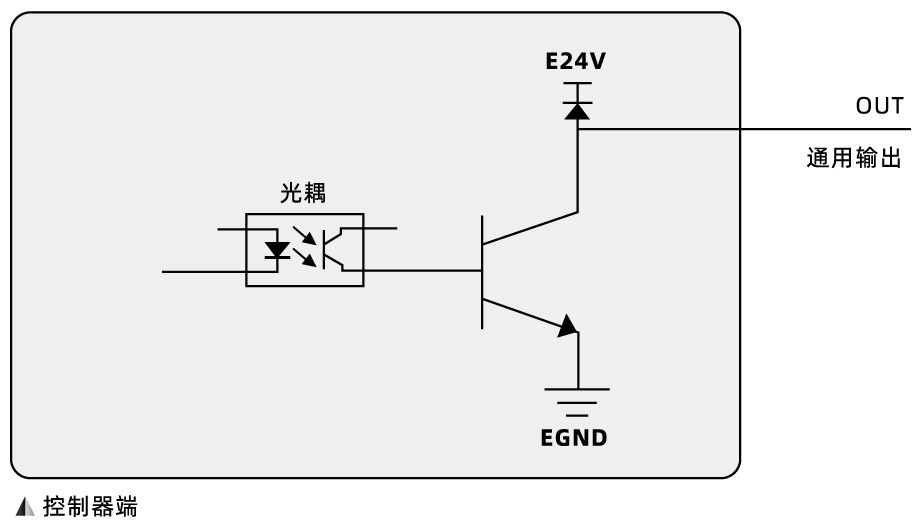
(1)輸出口
輸出口內(nèi)部電路如下圖,輸出口0-1支持PWM脈沖寬度調(diào)制輸出,同時還支持高速硬件比較輸出(PSO功能)。
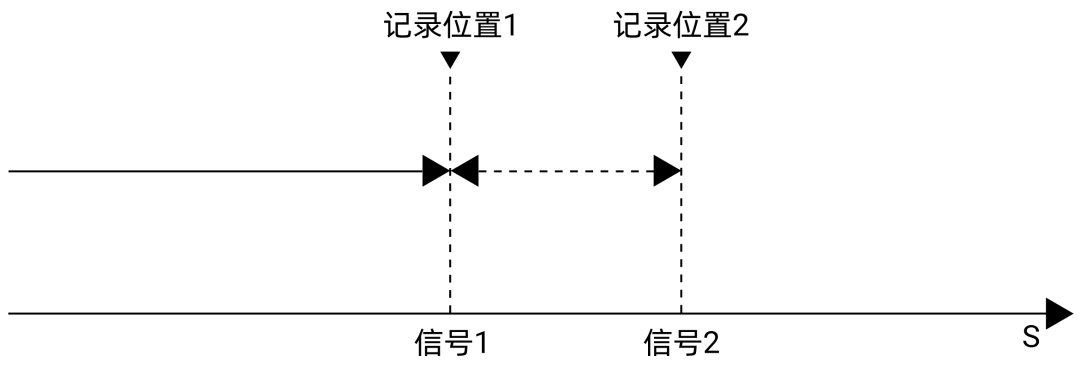
PSO功能:PSO(positionsynchronizedoutput)即位置同步輸出,本質(zhì)是通過采集實時的編碼器反饋位置(無編碼器可使用輸出的脈沖位置)與比較模式設(shè)定的位置進(jìn)行比較,控制OP高速同步輸出信號,PSO示意圖如下。
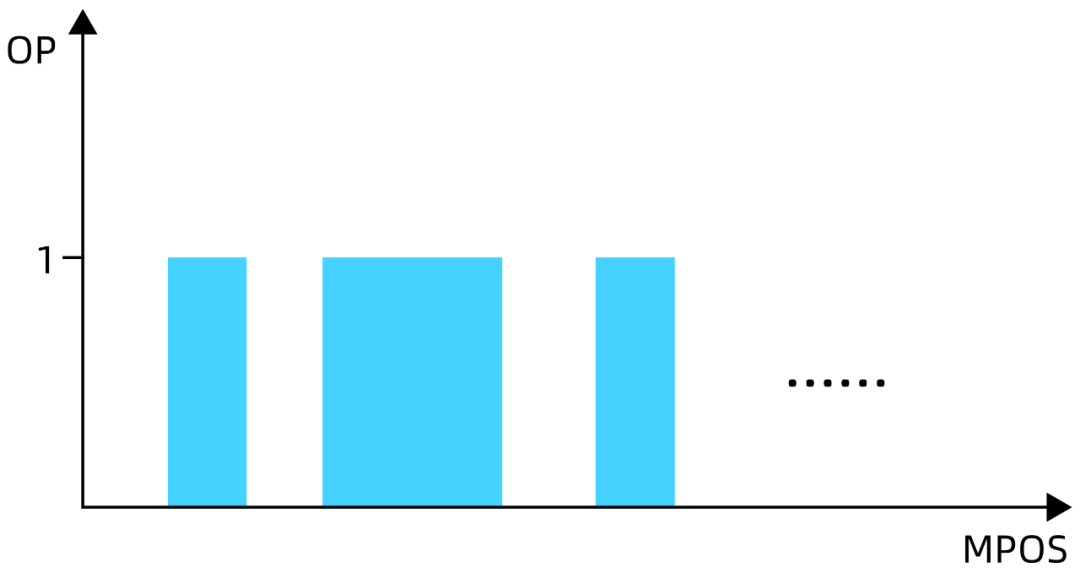
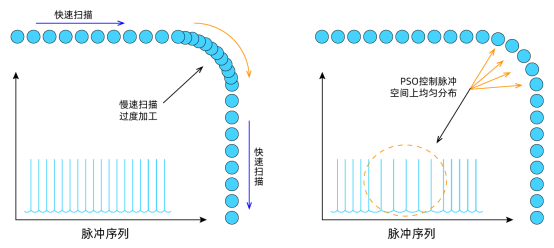
PSO一般與激光器(或點膠噴射閥等設(shè)備)同步輸出信號進(jìn)行相位同步,在運動軌跡的所有階段以恒定的空間(或恒定時間)間隔觸發(fā)輸出開關(guān),包括加速、減速和勻速段,從而實現(xiàn)脈沖能量均勻地作用在被加工物體上。
PSO功能的特點就是能高速且穩(wěn)定的輸出信號,因為輸出精度足夠高,所以能夠在整個運動軌跡中以固定的距離觸發(fā)輸出信號而不用考慮總體速度,即在直線部分以很快的速度運動,而在圓角部分減速的同時也能保證輸出間距恒定。
通常圓角加工部分在整個加工過程中占有比較小的部分,這樣在保證加工效果的同時,就可以最大限度地提高產(chǎn)能。
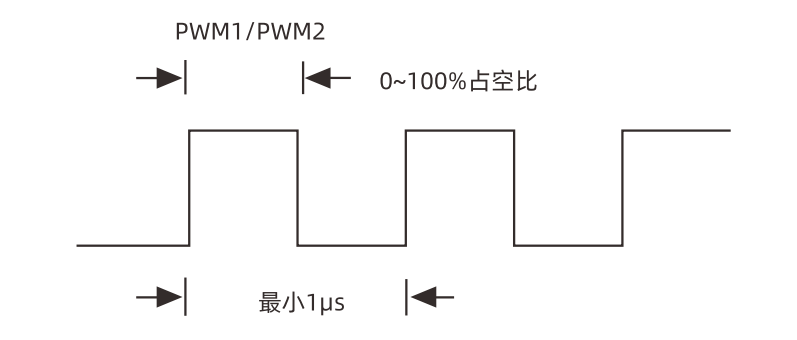
PSO功能由HW_PSWITCH2指令實現(xiàn),此指令有多種模式,支持等距輸出、固定周期輸出,自定義位置輸出等,精度高,響應(yīng)快,具體應(yīng)用方法參見歷史文章。 PWM功能:對支持PWM的OUT開啟PWM功能,需設(shè)置PWM的頻率和占空比,用于點膠閥的流速控制、激光器的功率控制等場合。
(2)輸入口
輸入口內(nèi)部電路如下圖,輸入口IN0-1支持鎖存功能。
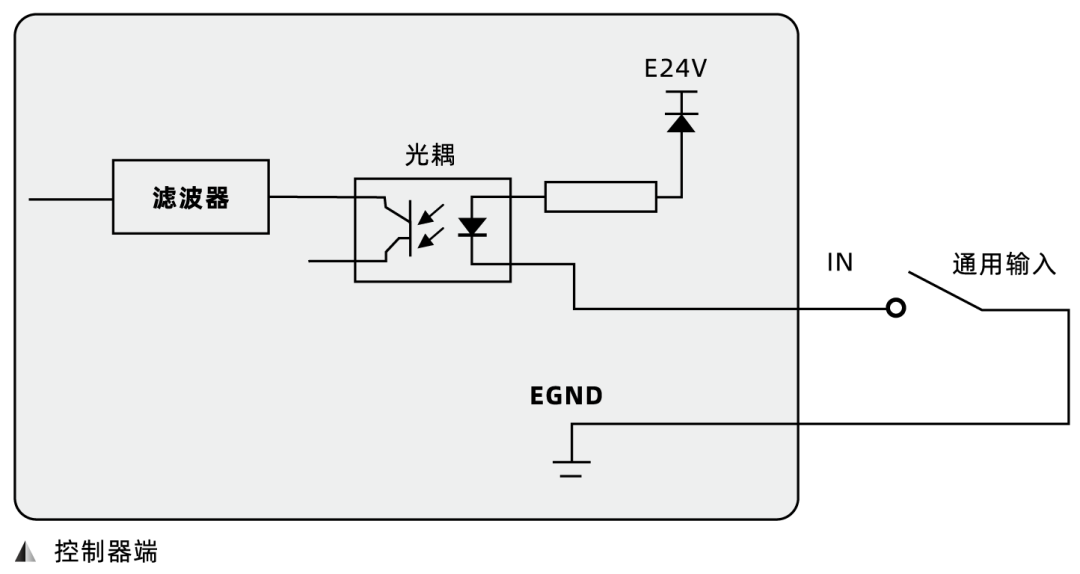
鎖存:通過傳感器輸入信號,輸入口快速響應(yīng)并鎖存編碼器當(dāng)前的位置信息,支持單次鎖存和連續(xù)鎖存。
二、ZDevelop連接控制器
采用正運動的ZDevelop開發(fā)軟件可快速完成設(shè)備的試運行,控制器一般使用網(wǎng)口連接到ZDevelop,選擇IP地址連接,默認(rèn)出廠IP:192.168.0.11,注意控制器需與PC處于同一網(wǎng)段。
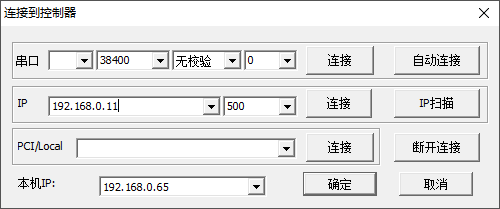
也可以使用串口連接控制器,串口默認(rèn)參數(shù)波特率38400,數(shù)據(jù)位8,無校驗,掉電后恢復(fù)默認(rèn)參數(shù)。
三、配置脈沖軸參數(shù)
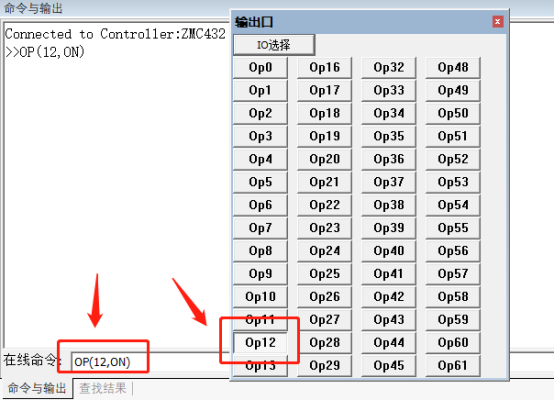
連接控制器之后先使能驅(qū)動器,根據(jù)硬件手冊描述的軸接口內(nèi)的使能信號OUT編號,發(fā)送OP(ionum,ON)打開使能,例如ZMC432發(fā)送OP(12,ON)使能AXIS 0上的驅(qū)動器。
在線命令發(fā)送或視圖“輸出口”操作OP,上電即使能的步進(jìn)驅(qū)動無需此操作。
以下軸參數(shù)可在“視圖”-“手動運動”或“軸參數(shù)”窗口快速配置,或新建工程寫入指令語句下載到控制器。 1.BASE
BASE選擇脈沖軸接入的軸號,接在DB頭上軸編號即為面板上標(biāo)識的AXIS編號。
2.ATYPE ATYPE設(shè)置軸的類型,不帶反饋的脈沖軸ATYPE=1/7,帶編碼器反饋的ATYPE=4/5,編碼器單獨接入設(shè)置ATYPE=3/6。
| ATYPE類型 | 描述 |
| 0 | 虛擬軸 |
| 1 | 脈沖方向方式的步進(jìn)或伺服 |
| 2 | 模擬信號控制方式的伺服 |
| 3 | 正交編碼器 |
| 4 | 脈沖方向輸出+正交編碼器輸入 |
| 5 | 脈沖方向輸出+脈沖方向編碼器輸入 |
| 6 | 脈沖方向方式的編碼器 |
| 7 | 脈沖方向方式步進(jìn)或伺服+EZ信號輸入 |
| 8 | ZCAN擴(kuò)展脈沖方向方式步進(jìn)或伺服 |
| 9 | ZCAN擴(kuò)展正交編碼器 |
| 10 | ZCAN擴(kuò)展脈沖方向方式的編碼器 |
| 20 |
振鏡類型,帶振鏡狀態(tài)反饋 振鏡連接不上AXISSTATUS的bit2會置位,ENCODER返回原始的發(fā)送位置,脈沖單位 ZMC408SCAN支持 |
| 21 |
振鏡軸類型,需要控制器支持 缺省系統(tǒng)周期250us,振鏡刷新周期50us,與固件有關(guān) 可以使用普通軸的所有運動控制指令,支持振鏡軸與其它軸類型混合插補(bǔ) |
| 22 |
振鏡軸類型,帶振鏡位置反饋 振鏡連接不上AXISSTATUS的bit2會置位,振鏡報警AXISSTATUS的bit3會置位 MPOS返回反饋位置,做了反矯正處理,ENCODER返回原始的反饋位置脈沖單位 ZMC408SCAN支持 |
| 24 |
遠(yuǎn)程編碼器軸類型 ZHD500X上手輪使用,需要控制器5系列20180404以上固件版本支持 |
| 50 | RTEX周期位置模式,需RTEX控制器 |
| 51 | RTEX周期速度模式,需RTEX控制器 |
| 52 |
RTEX周期力矩模式,需RTEX控制器 請先關(guān)閉驅(qū)動器2自由度控制模式,并設(shè)置設(shè)置速度限制 |
| 65 | EtherCAT周期位置模式,需支持EtherCAT |
| 66 |
EtherCAT周期速度模式,需支持EtherCAT Profile要設(shè)置為20或以上 |
| 67 |
EtherCAT周期力矩模式,需支持EtherCAT PROFILE要設(shè)置為30或以上 |
| 70 | EtherCAT自定義操作,只讀取編碼器,需支持EtherCAT |
3.UNITS
UNITS設(shè)置脈沖當(dāng)量,根據(jù)驅(qū)動器的一圈脈沖數(shù)配置,作為控制器的基本單位,可設(shè)為電機(jī)轉(zhuǎn)動1°需要的脈沖數(shù),驅(qū)動器若10000個脈沖轉(zhuǎn)一圈,可設(shè)置為UNITS=10000/360。
換算關(guān)系:若UNITS=10000,直線命令MOVE(5)表示下發(fā)50000個脈沖;運行速度SPEED=10,表示每秒下發(fā)100000個脈沖。
4.速度
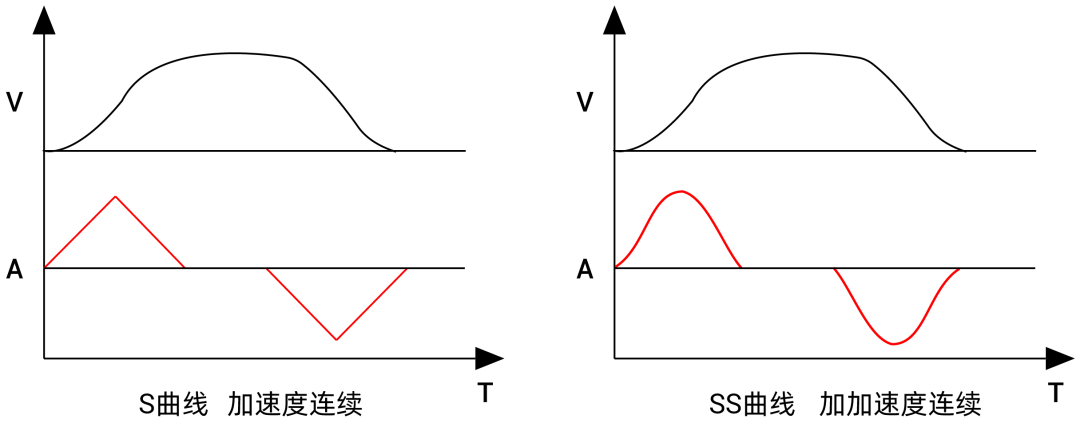
SPEED運行速度、ACCEL加速度、DECEL減速度等基礎(chǔ)速度參數(shù)的設(shè)置;SRAMP指令設(shè)置S曲線,延長加速的時間,速度變化更為平緩,減少抖動,VP_MODE指令設(shè)置SS曲線,加速度平穩(wěn)過渡,使軌跡更柔順,沖擊更小。
5.確認(rèn)脈沖模式
控制器出廠默認(rèn)的脈沖模式是脈沖+方向,脈沖模式需要匹配才能運行,需確認(rèn)驅(qū)動器的脈沖模式。
控制器支持三種脈沖模式,脈沖+方向,雙脈沖和正交脈沖(4系列及以上支持)三種,正/負(fù)邏輯均可配置。
脈沖模式修改使用INVERT_STEP指令,初始值INVERT_STEP=0,脈沖+方向模式。
語法INVERT_STEP = mode
mode:模式選擇,缺省0,低8位(位0-位7)表示的模式值如下:
| 模式值 | 說明 | 參考示意圖(正邏輯模式) |
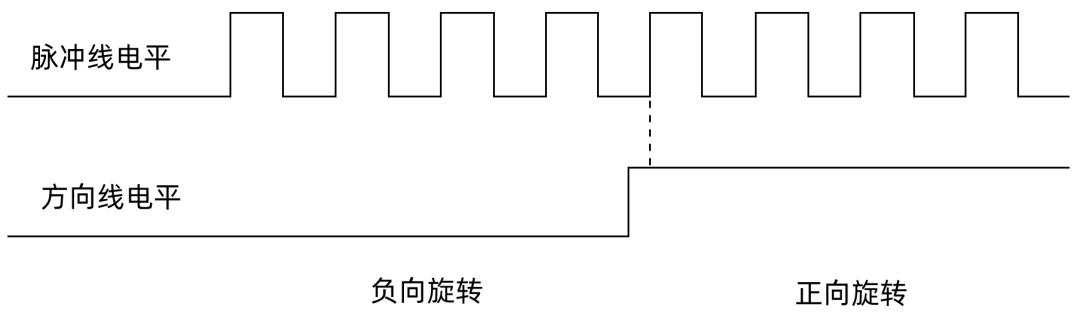
| 0-3 |
脈沖方向模式 脈沖線+方向線 |
 |
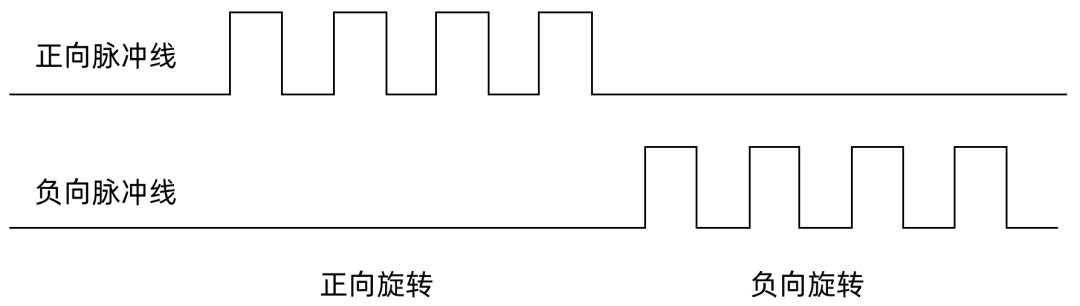
| 4-7 |
雙脈沖方式(或稱CW/CCW) 正向脈沖線+負(fù)向脈沖線 |
 |
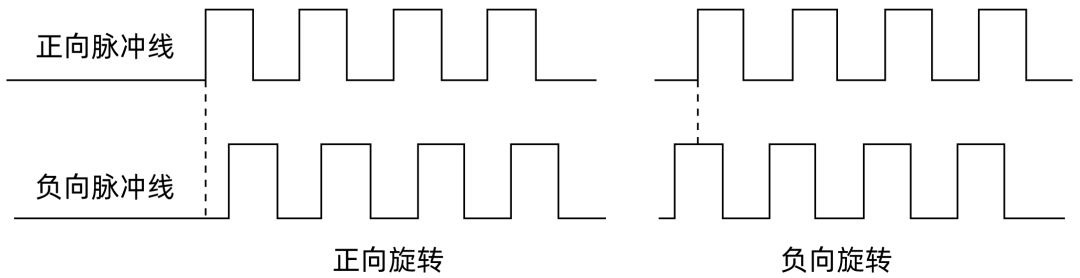
| 8-9 |
AB輸出,正交脈沖 (部分控制器定制) |
 |
各個模式對應(yīng)的電平如下:若極性對調(diào),參考運動方向與原來相反。
| 模式值 | 描述 | 松下設(shè)置參考 | 三菱設(shè)置參考 | |
| Pr0.06 | Pr0.07 | PA13 | ||
| 0 | 脈沖/方向(脈沖正邏輯)(正向) | 0 | 3 | ××01h |
| 1 | 脈沖/方向(脈沖負(fù)邏輯)(正向) | / | / | ××11h |
| 2 | 脈沖/方向(脈沖正邏輯)(負(fù)向) | 1 | 3 | ××01h |
| 3 | 脈沖/方向(脈沖負(fù)邏輯)(負(fù)向) | / | / | ××11h |
| 4 | 雙脈沖(方向負(fù)邏輯)(正向) | / | / | ××10h |
| 5 | 雙脈沖(方向負(fù)邏輯)(負(fù)向) | / | / | ××10h |
| 6 | 雙脈沖(方向正邏輯)(正向) | 1 | 1 | ××00h(默認(rèn)) |
| 7 | 雙脈沖(方向正邏輯)(負(fù)向) | 0(默認(rèn)) | 1(默認(rèn)) | ××00h(默認(rèn)) |
高8位(位8-位15)表示方向變化保護(hù)時間,單位微秒:0-255 設(shè)置方法:INVERT_STEP(軸號) = 256*100+6,雙脈沖模式6,保護(hù)時間100微秒。
6.運動
采用視圖菜單的手動運動窗口或在線命令發(fā)送MOVE直線運動指令調(diào)試,通過DPOS目標(biāo)位置(或MPOS反饋位置)等獲取軸的運動情況,也可采用ZDevelop軟件的視圖窗口“示波器”實時采樣運動波形。 電機(jī)運動方向與電機(jī)極性設(shè)置和INVERT_STEP正/負(fù)邏輯設(shè)置有關(guān)。 7.參數(shù)查看
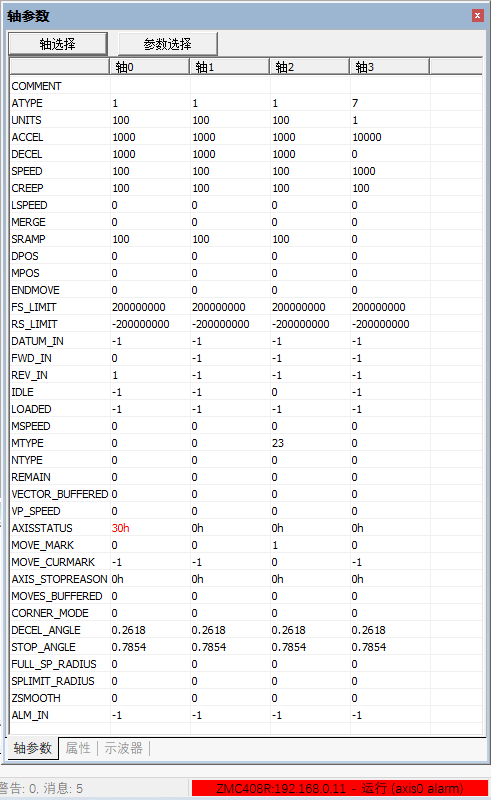
軸參數(shù)配置完成可再“軸參數(shù)”窗口查看,實時自動刷新和顯示軸參數(shù),支持雙擊直接修改配置參數(shù)。

軸選擇:用于選擇要顯示的軸號信息。
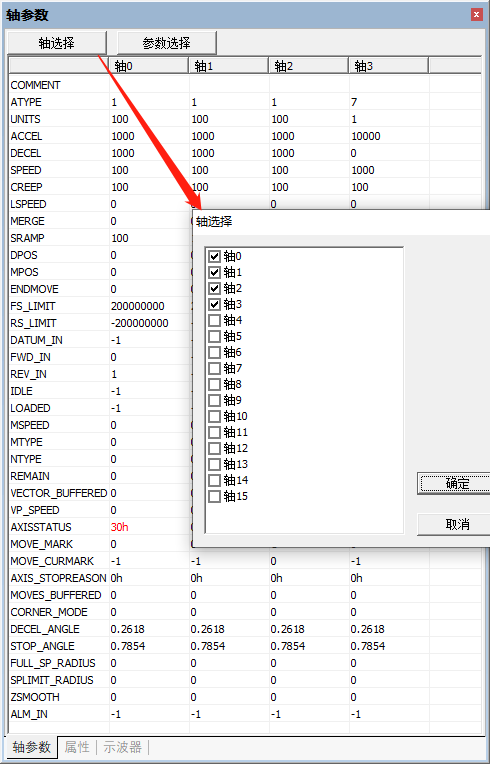
參數(shù)選擇:用于自定義顯示關(guān)注的軸參數(shù)。 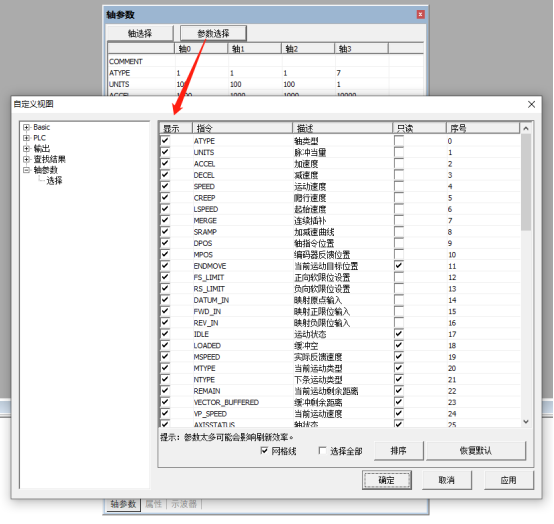
8.異常報警
發(fā)生異常報警ZDevelop軟件的“命令與輸出”窗口打印錯誤信息提示,或產(chǎn)生AXISSTATUS報警提示。
AXISSTATUS為軸狀態(tài)參數(shù),用于判斷軸當(dāng)前是否發(fā)生異常,按位提示異常信息,可多種異常信息疊加,查詢下表確認(rèn),例如AXISSTATUS顯示20h,表示當(dāng)前碰到負(fù)向硬限位,會導(dǎo)致軸立即停止。
AXISSTATUS顯示1000h,表示下發(fā)脈沖頻率太快,一般只有在高分辨率的設(shè)備會產(chǎn)生此類問題,出現(xiàn)此報警將MAX_SPEED改大即可解決。
| 位 | 說明 | 打印值 | |
| 1 | 隨動誤差超限告警 | 2 | 2h |
| 2 | 與遠(yuǎn)程軸通訊出錯 | 4 | 4h |
| 3 | 遠(yuǎn)程驅(qū)動器報錯 | 8 | 8h |
| 4 | 正向硬限位 | 16 | 10h |
| 5 | 負(fù)向硬限位 | 32 | 20h |
| 6 | 找原點中 | 64 | 40h |
| 7 | HOLD速度保持信號輸入 | 128 | 80h |
| 8 | 隨動誤差超限出錯 | 256 | 100h |
| 9 | 超過正向軟限位 | 512 | 200h |
| 10 | 超過負(fù)向軟限位 | 1024 | 400h |
| 11 | CANCEL執(zhí)行中 | 2048 | 800h |
| 12 | 脈沖頻率超過MAX_SPEED限制.需要修改降速或修改MAX_SPEED | 4096 | 1000h |
| 14 | 機(jī)械手指令坐標(biāo)錯誤 | 16384 | 4000h |
| 18 | 電源異常 | 262144 | 40000h |
| 19 | 精準(zhǔn)輸出緩沖溢出 | 524288 | 80000h |
| 21 | 運動中觸發(fā)特殊運動指令失敗 | 2097152 | 200000h |
| 22 | 告警信號輸入 | 4194304 | 400000h |
| 23 | 軸進(jìn)入了暫停狀態(tài) | 8388608 | 800000h |
試運行前要確保硬限位開關(guān)配置成功,作為機(jī)臺的安全保護(hù),防止過沖。
機(jī)臺確認(rèn)可以動作之后,通過DATUM指令配置回零模式,DATUM_IN指令配置原點傳感器映射到輸入口,回零說明參見歷史文章。
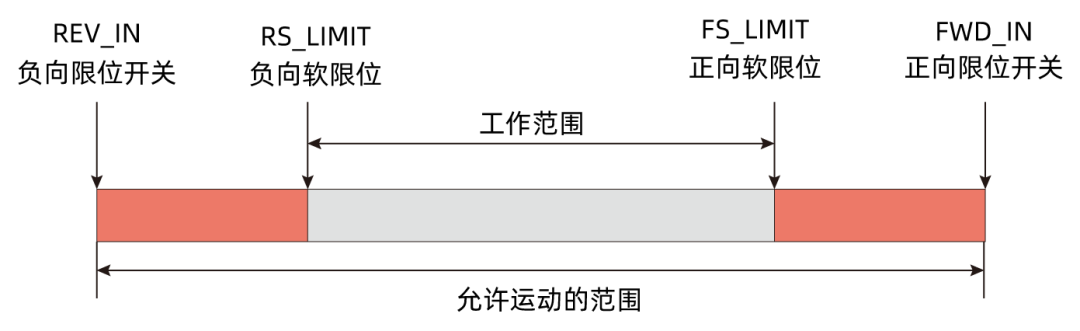
硬限位開關(guān)是限制軸的最大“允許行進(jìn)范圍”的限位開關(guān)。硬限位開關(guān)是安裝在軸運動行程上的物理開關(guān)元件,一般是一個傳感器,硬限位開關(guān)由指令映射到相應(yīng)輸入開關(guān)信號上,根據(jù)開關(guān)信號是常開還是常閉確定是否要對信號進(jìn)行翻轉(zhuǎn),設(shè)置完成后,碰到硬限位開關(guān),對應(yīng)軸立即停止運動,停止減速度為FASTDEC。 軟限位開關(guān)將限制軸的“工作范圍”,由指令直接設(shè)置限位位置,軸走到設(shè)置的DPOS坐標(biāo)位置后,立即采用減速度FASTDEC停止運動,根據(jù)實際需求配置軟限位。
9.配置語法
FWD_IN = 正向硬限位接入的輸入口編號,-1取消映射;
REV_IN = 負(fù)向硬限位接入的輸入口編號,-1取消映射;
FS_LIMIT = 正向運動行程限制,取消設(shè)置較大值;
RS_LIMIT = 負(fù)向運動行程限制,取消設(shè)置較大值。
例如,ZDevelop軟件下方狀態(tài)欄提示axis0 alarm提示紅色的報警錯誤,檢查軸參數(shù)中軸0的AXISSTATUS參數(shù),提示30h,對照AXISSTATUS指令說明,得知發(fā)生的是正負(fù)限位報警,查看限位配置,即FWD_IN(0)=0,REV_IN(0)=1對應(yīng)的IN0,IN1的配置,以及其相關(guān)的輸入是否INVERT_IN反轉(zhuǎn)了電平狀態(tài)。
四、手動運動快速調(diào)試
關(guān)閉所有除ZDevelop的軟件,同時使用ZDevelop連接控制器,下載空程序,按前面說明手動設(shè)置選擇要調(diào)試的軸號、設(shè)置軸類型ATYPE、脈沖當(dāng)量UNITS、加速度ACCEL、減速度DECEL、速度SPEED,然后打開“視圖”-“手動運動”,手動操作電機(jī)試運行。
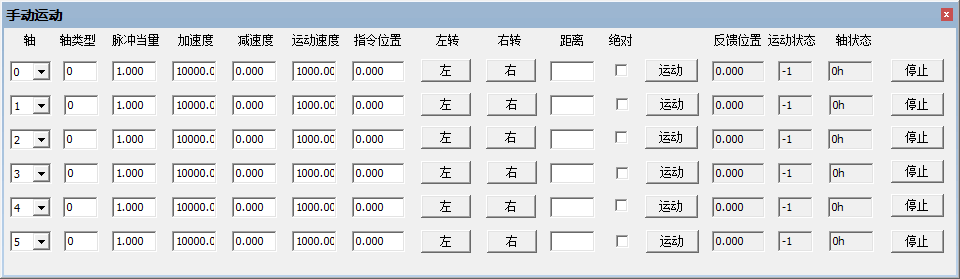
操作方法:按住“左”/“右”不放,電機(jī)持續(xù)運動,松開停止。“指令位置”顯示當(dāng)前發(fā)出的脈沖DPOS(單位為UNITS)。填寫“距離”參數(shù),點擊“運動”,勾選“絕對”時,電機(jī)運動到距離參數(shù)位置;不勾選“絕對”時,電機(jī)按距離參數(shù)繼續(xù)運動。
按照以上步驟設(shè)置之后,如果電機(jī)無法運動,參考下節(jié)說明排查。
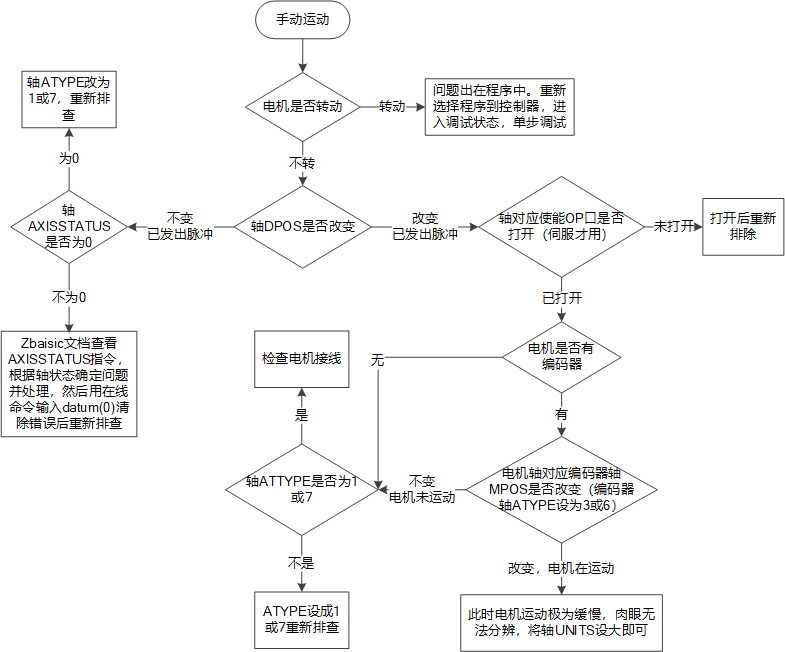
02電機(jī)不動作問題排查
一、脈沖軸排查步驟
 ? ?
? ?
二、報錯提示
驅(qū)動器有無報警提示,若產(chǎn)生報警,根據(jù)報警錯誤碼核對驅(qū)動器手冊說明解決后重新運行。
控制器端是否產(chǎn)生報警信息,根據(jù)ZDevelop報警打印的錯誤信息、錯誤碼或AXISSTATUS軸狀態(tài)提示,解除錯誤后重新運行。
三、參數(shù)設(shè)置不當(dāng)
檢查下列參數(shù)是否設(shè)置合理:
1.電機(jī)是否使能成功,電機(jī)軸無法用手撥動即為成功使能;
2.下發(fā)運動的軸號一定要選擇正確,否則運動命令無法下發(fā)給該驅(qū)動器;
3.軸的類型根據(jù)ATYPE指令的表格填寫正確類型,類型錯誤控制器會報錯,導(dǎo)致無法運動;
4.UNITS的值設(shè)置合理,脈沖下發(fā)速度太小導(dǎo)致電機(jī)動作微弱,肉眼無法分辨是否運動;
5.下發(fā)運動指令后,軸參數(shù)窗口該軸的DPOS是否改變,未變表示脈沖并未發(fā)出,排查AXISSTATUS軸狀態(tài)有無提示,當(dāng)前軸接口是否損壞。
四、動作不正確
1.電機(jī)只能單向運動,可能原因有:
(1)電機(jī)處于限位狀態(tài),查看AXISSTATUS確認(rèn);
(2)電機(jī)控制模式不對,INVERT_STEP設(shè)置為相應(yīng)的脈沖模式(雙脈沖或脈沖+方向);
(3)電機(jī)接線問題,確認(rèn)接線。
2.DPOS和MPOS極性相反,或電機(jī)轉(zhuǎn)向與預(yù)期相反,解決辦法: 修改電機(jī)的極性,通過INVERT_STEP指令或驅(qū)動器軟件修改。 接線錯誤時注意事項:
⊙檢查脈沖接線和供電線路是否正確。
⊙檢查各模塊是否正確上電。
⊙檢查單端接線時確認(rèn)IO是否上電成功。 本次,正運動技術(shù)EtherCAT運動控制器中脈沖接口的快速調(diào)試與診斷,就分享到這里。
關(guān)于正運動技術(shù)
正運動技術(shù)專注于運動控制技術(shù)研究和通用運動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè),主要產(chǎn)品有運動控制器、運動控制卡、視覺運動控制一體機(jī)、人機(jī)界面以及擴(kuò)展模塊等。
正運動技術(shù)匯集了來自華為、中興等公司的優(yōu)秀人才,在堅持自主創(chuàng)新的同時,積極聯(lián)合各大高校協(xié)同運動控制基礎(chǔ)技術(shù)的研究,是國內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運動控制核心技術(shù)和實時工控軟件平臺技術(shù)的企業(yè)。
正運動技術(shù)背靠蓬勃發(fā)展的制造業(yè),與時俱進(jìn),富有創(chuàng)新,致力于智能制造設(shè)備商和終端用戶不斷提升技術(shù)應(yīng)用和制造水平。經(jīng)過眾多合作伙伴多年的應(yīng)用開發(fā),產(chǎn)品廣泛應(yīng)用于國內(nèi)外的3C電子、半導(dǎo)體、印刷包裝、紡織服裝、激光加工、機(jī)械加工、機(jī)器人、新能源、醫(yī)療保健、舞臺娛樂等領(lǐng)域。
審核編輯:湯梓紅
-
驅(qū)動器
+關(guān)注
關(guān)注
54文章
8676瀏覽量
149697 -
接口
+關(guān)注
關(guān)注
33文章
8980瀏覽量
153587 -
運動控制器
+關(guān)注
關(guān)注
2文章
448瀏覽量
25236 -
總線
+關(guān)注
關(guān)注
10文章
2958瀏覽量
89628 -
ethercat
+關(guān)注
關(guān)注
19文章
1087瀏覽量
39914
原文標(biāo)題:EtherCAT運動控制器中脈沖接口的快速調(diào)試與診斷
文章出處:【微信號:伺服與運動控制,微信公眾號:伺服與運動控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
EtherCAT運動控制器中脈沖接口的快速調(diào)試與診斷
EtherCAT總線運動控制器硬件是如何進(jìn)行接線的?
正運動技術(shù)運動控制器EtherCAT總線快速入門
正運動技術(shù)運動控制器EtherCAT總線的基礎(chǔ)使用
EtherCAT總線運動控制的優(yōu)勢主要體現(xiàn)在哪?
經(jīng)濟(jì)型EtherCAT運動控制器:EtherCAT總線快速入門
【正運動】全國產(chǎn)EtherCAT運動控制器 | ZMC432H
EtherCAT總線運動控制的優(yōu)勢主要體現(xiàn)在哪?
全國產(chǎn)EtherCAT運動控制邊緣控制器-ZMC432H

全國產(chǎn)EtherCAT運動控制邊緣控制器(一):ZMC432H硬件接口
EtherCAT運動控制邊緣控制器ZMC432H的軸參數(shù)配置和單軸運動控制

全國產(chǎn)EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發(fā)

凌華科技基于軟件控制的EtherCAT運動控制器

EtherCAT運動控制器在LabVIEW中的運動控制與實時數(shù)據(jù)采集

脈沖全閉環(huán)EtherCAT運動控制器的固件升級






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論