") 無人機(jī)通信系統(tǒng)知識點總結(jié)
無人機(jī)通信系統(tǒng)知識點總結(jié)
一、信號頻段
5.8G:該頻段暫時是航拍領(lǐng)域使用最廣泛的無線微波視頻傳輸器。
優(yōu)點:體積輕盈,低熱量,距離遠(yuǎn),并且價位很透明,頻道最大可釋放出32個可選。至今仍是航拍微波傳圖領(lǐng)域的首選。工信部信號限制當(dāng)中,5.8G微波信號是消費級開放頻段,也就是無論你是否經(jīng)過許可,都可以用5.8G信號作為你航拍器的傳圖作業(yè)。在畫質(zhì)的處理上,優(yōu)秀的5.8G視頻傳輸器能夠完全釋放出64位模擬色彩度輸出。并且部分廠家對5.8G這個頻段在環(huán)境污染、輻射人體、干擾其他無線設(shè)施測試中,得到了影響最低的評分。
缺點:波長問題導(dǎo)致該信號穿透力極差,易受外界因素干擾。航拍的陸對空條件反而造就了絕對空曠的環(huán)境,因此工信部首先開放的就是5.8G允許在消費級產(chǎn)品使用。5.8G沒有很夸張的功率,實際功率基本上≤2W。
2.4G:該頻段應(yīng)用最廣泛的領(lǐng)域是日常家用電器,其主要用途是陸地工業(yè)無線監(jiān)控工程。
優(yōu)點:及其廉價,頻點容易把控,最大可釋放出12個頻道。2.4G無線視頻傳輸器應(yīng)用最多的還是解決陸對陸無線監(jiān)控問題。可讓監(jiān)控攝像機(jī)短程無線傳輸信號,發(fā)射器模塊上的電子元器體積大,間隔距離較遠(yuǎn),散熱效果最好,適合長時間超負(fù)荷作業(yè)。波長略勝與5.8G有較好的穿透力和圖像穩(wěn)定性。功率甚至可以通過信號放大器、信號增益模塊釋放出20瓦以上的功率。
缺點:還是廉價的問題,導(dǎo)致兒童遙控玩具、電視機(jī)遙控器、路由器等日常用品都會采用該頻段,使用此類發(fā)射器特別容易被干擾,也就是傳出來的畫面會有大雪花點、斷頻、串頻等情況。容易受溫差漂移干擾,也就是水蒸氣上升時能看到的扭曲背景。廉價產(chǎn)品不用說采用的電子元器件都是最原始的,不像5.8G和1.2G主要采用貼片和模塊式電子元件。并且2.4G信號段的視頻傳輸器在市場上很少有實際標(biāo)注功率的產(chǎn)品,用幾百毫瓦的模塊換一個大殼子就號稱是8瓦或十瓦大功率。因此,好多使用者會發(fā)現(xiàn)一個2.4G 8W的大功率傳圖竟然不如一個5.8G 600mw的發(fā)射器距離遠(yuǎn)。據(jù)我所知2.4G的視頻傳圖模塊還沒有正規(guī)廠家生產(chǎn),僅有幾個正規(guī)廠家生產(chǎn)監(jiān)控工業(yè)級的設(shè)備,廠家也不是特別有實力。同時工信部對2.4G還是有管制的,只是限制了2.4G內(nèi)的某幾個頻道。
1.2G:屬于低頻信號,穿透力極強(qiáng),可覆蓋所有對無線視頻傳輸?shù)念I(lǐng)域。
優(yōu)點:波頻最連貫,大多傳輸器都可處理主、輔兩種波頻,高于2.4G的信號傳輸相當(dāng)于再海面或淺水游泳,低于1.5G的相當(dāng)于在海底,海面上再大的驚濤駭浪,海底仍然平靜。已知市面上模塊最大功率可達(dá)到8W,傳圖的圖像也可處理64位乃至更高的畫質(zhì),發(fā)射器本身體積也極其微小,可無限延伸設(shè)備功能。大多1.2G信號的發(fā)射器都不受溫差相位漂移的影響,也是微波無線視頻傳輸器里最適合陸對陸傳輸?shù)摹1容^知名的發(fā)射器品牌如:臺灣羅美、深圳栢通等,其中臺灣羅美1.2G是全球航拍玩家家喻戶曉的,除了臺灣羅美以外再無任何無線微波視頻傳輸器能夠處理出≥64位的色彩。在外國航拍玩家中,有相當(dāng)一部分玩家在增益達(dá)到的情況下將羅美1W視頻傳輸器打出25~30公里的超長距離。深圳栢通也以最廉價的1.2G頗受老外們的認(rèn)可,1.2G超強(qiáng)的穿透力也是陸對陸的首選。
缺點:1.2G是工信部最早嚴(yán)令禁止空中使用的頻段,但不包括經(jīng)過許可的民用級產(chǎn)品。在國內(nèi)1.2G信號段仍服役與軍方和政府機(jī)構(gòu),同時也因為1.2G過強(qiáng)的功率會導(dǎo)致周邊無線設(shè)備失靈,因此1.2G并不能當(dāng)作消費產(chǎn)品公開銷售。因以上條件導(dǎo)致1.2G發(fā)射器價格較高,最貴可達(dá)到幾千元。1.2G發(fā)射器普遍比其他頻道的發(fā)射器溫度高,也因1.2G內(nèi)可釋放頻道少的緣故,很多不同廠家的發(fā)射器可以共用接收器,串頻率也較高。
二、編碼方式
PCM:脈沖編碼調(diào)制,以約定好的二進(jìn)制碼流傳遞信息,可以時分復(fù)用(不同的制式時隙個數(shù)不同,在實際中使用的是兩種對數(shù)形式的壓縮特性:A律和U律,A律編碼主要用于30/32路一次群系統(tǒng),U律編碼主要用于24路一次群系統(tǒng)。A律PCM用于歐洲和中國,U律PCM用于北美和日本)
PPM:脈沖位置調(diào)制,以不同時刻出現(xiàn)的脈沖位置傳遞信息,可以時分復(fù)用;
PWM:脈沖寬度調(diào)制,以脈沖占空比傳遞信息,不可以時分復(fù)用;PWM以及其變種SPWM廣泛用于電機(jī)調(diào)頻調(diào)速控制。
PPM和PCM都用于遙控設(shè)備無線傳輸上,PCM屬于數(shù)字調(diào)制,需要利用高速AD和DA;PPM利用積分器和濾波器,屬于模擬調(diào)制。
反應(yīng)速度PPM快于PCM,PPM和PCM都是信號編碼方式,可內(nèi)建多路信號。PWM是脈沖寬度調(diào)制,也就是單通道的。發(fā)射機(jī)模式與接收機(jī)模式要一致才能對頻。
無人機(jī)遙控要傳輸?shù)谋匦栊畔ㄓ烷T,偏航,偏移與俯仰,可選信息包括對云臺等信息的控制。PWM無法傳輸多路信號,無法應(yīng)用在無線傳輸中。PPM由于易失真,因此,目前主流編碼方式是采用PCM波形編碼。還有SBUS,DSM等
后來由于視頻信息傳輸?shù)男枨螅碳視D傳與控制傳輸做到一套傳輸系統(tǒng)內(nèi)。比如,DJI Lightbridg全高清數(shù)字圖像傳輸系統(tǒng),其內(nèi)置了2.4G遙控鏈路,其高配方案實測有效傳輸距離高達(dá)5km,標(biāo)配也達(dá)到了1.7Km。
三、無人機(jī)遙控指令加密方法
遙控信息的安全問題是無人機(jī)遙控系統(tǒng)設(shè)計和任務(wù)實施過程中最重要的問題之一。然而日益發(fā)展的電子偵察和電子對抗技術(shù),使第三方可以截獲已方所發(fā)送的遙控指令,分析和竊取遙控信息的內(nèi)容,從而偽造遙控信息,對己方無人機(jī)構(gòu)成嚴(yán)重威脅。隨著現(xiàn)代通信技術(shù)和密碼技術(shù)的發(fā)展,人們通常采取指令加密的方式使遙控指令獲得更高的安全性和可靠性。為此我們設(shè)計了一種一次一密的序列密碼加密方案,并結(jié)合加解密的流程采用不同的遙控幀結(jié)構(gòu),確保無人機(jī)遙控指令安全可靠地傳輸。
(一)無人機(jī)遙控的基本概念
所謂無人機(jī)的遙控就是在主控端(通常指地面控制站)將控制命令(飛行控制命令、任務(wù)控制命令)變換成指令,通過無線電上行信道發(fā)向無人機(jī)的相關(guān)機(jī)載遙控遙測設(shè)備。機(jī)載遙控遙測設(shè)備經(jīng)過一系列變換及指令解碼即得到開關(guān)指令或連續(xù)指令信號。這些信號送到無人機(jī)自動駕駛儀或任務(wù)執(zhí)行機(jī)構(gòu),控制飛機(jī)飛行或者控制任務(wù)設(shè)備做相應(yīng)動作。
1、遙控指令構(gòu)成
遙控指令主要用于實現(xiàn)對無人機(jī)的控制,其構(gòu)成直接取決于無人機(jī)飛行原理和控制方式。根據(jù)功能劃分,遙控幀可分為實時開關(guān)命令幀和串行注入數(shù)據(jù)幀。在每幀中需要設(shè)定方式字,以便對幀的內(nèi)容進(jìn)行判定6遙控指令通常每隔100ms發(fā)送一幀,每幀32B,包括數(shù)據(jù)頭定義、飛控指令、導(dǎo)航數(shù)據(jù)和效驗字等。遙控指令的格式如圖1所示。
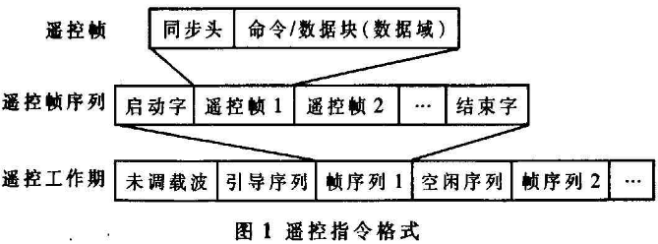
上行遙控信道開啟一次為一個遙控工作期。在每個遙控工作期的開頭有一個引導(dǎo)序列,使無人機(jī)上載波、副載波解調(diào)器進(jìn)入穩(wěn)定和同步狀態(tài)口如果在一個遙控工作期內(nèi)間歇發(fā)送若干個遙控幀或遙控幀序列,則需要在間歇期間用空閑序列填充,以維持必要的同步。
2、遙控指令特點
遙控指令的數(shù)據(jù)量很小,通常12.8kb/s的傳輸速率就可滿足要求,其具有以下特點:
(1)實時性好。地面控制站通過遙控指令直接控制無人機(jī)的飛行姿態(tài),所以指令延遲不允許太長。
(2)可靠性高。無人機(jī)的飛行控制主要依靠遙控指令,對指令產(chǎn)生、發(fā)送、傳輸和接收的可靠性要求非常高。
(3)抗干擾性好。為了避免和減少由漏指令、誤指令引起的無人機(jī)飛行事故,遙控指令要求具有較強(qiáng)的抗干擾能力。
(4)保密性高。為了確保無人機(jī)的控制規(guī)律和飛行航跡不被截獲,對遙控指令的保密性要求較高。
(二)基于序列密碼的遙控指令加密
在數(shù)據(jù)文件加密處理中最常用的方法有分組加密和序列加密。分組加密以塊為單位對數(shù)據(jù)進(jìn)行加密和解密,塊的長度由算法設(shè)計人員設(shè)定,塊最小長度由對密碼強(qiáng)度的考慮來確定。序列加密時數(shù)據(jù)加解密的塊長可以由用戶自己確定,不要求最小塊長,在極端情況下,可以逐位加密。
本文采用序列密碼加密體制主要是基于以下幾方面因素:
(1)二者都可以做到高強(qiáng)度保密,從實現(xiàn)上來看,分組密碼較復(fù)雜,序列密碼相對簡單。
(2)分組加密體制對信息加密存在誤碼擴(kuò)散和一定延時,一般應(yīng)用于信道傳輸質(zhì)量較好或具有數(shù)據(jù)重發(fā)功能的場合。
(3)序列密碼加密體制對信號的低延時、無誤碼擴(kuò)散等特點,更適合應(yīng)用在誤碼率較高的無線鏈路中。
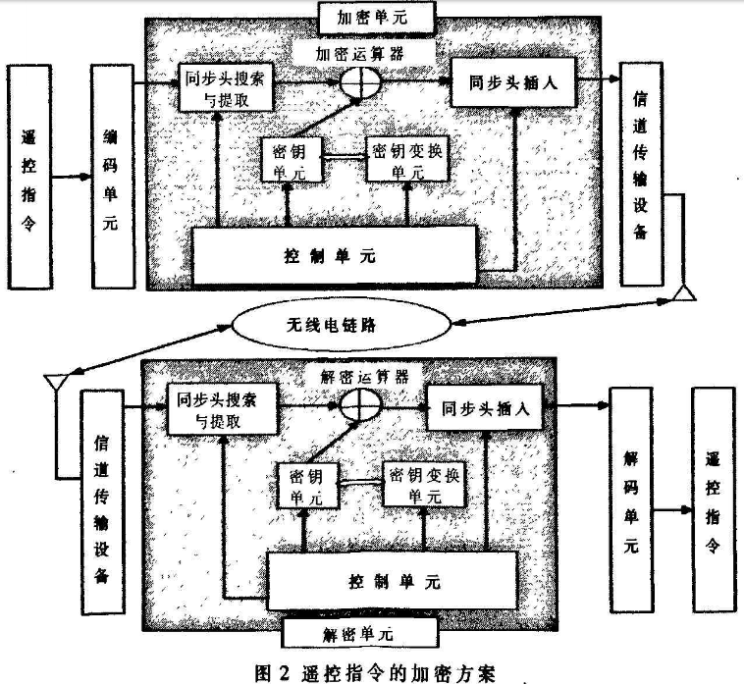
本文采用的是真隨機(jī)序列作為初始密鑰的一次一密的加密方案,如圖2所示,由嵌入到通信鏈路中的加解密單元完成對遙控指令實施加解密操作。這種做法避免保密單元處理大量與通信相關(guān)的內(nèi)容,提高信息處理的速率,確保遙控指令及時、可靠地傳輸。
1、密鑰的產(chǎn)生、傳送和儲存
圖2中密鑰單元存儲的是完成本次飛行任務(wù)所需的加密密鑰。第一個加密密鑰由基本密鑰與會話密鑰作用產(chǎn)生,其后的每個加密密鑰由上一個加密密鑰變換產(chǎn)生,此種做法可以避免保密單元存儲大量的加解密密鑰。圖3為密鑰產(chǎn)生的過程。
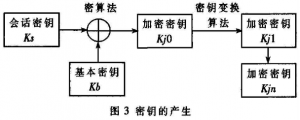
其中,基本密鑰Kb由地面站與機(jī)載共同擁有。加密單元的基本密鑰由密鑰IC卡注入到Flash存儲模塊中,解密單元的基本密鑰由地面站輔助注鑰設(shè)備注入到機(jī)載Flash存儲模塊中。基本密鑰由兩部分組成,其中一部分用于對密鑰變換單元存儲的密算法進(jìn)行解密,另一部分則與會話密鑰作用產(chǎn)生加密密鑰。會話密鑰Ks是一組真隨機(jī)序列,通過基于電阻熱噪聲的真隨機(jī)序列產(chǎn)生器中提取,它在理論上是不可破譯的。其隨機(jī)序列發(fā)生器的基本結(jié)構(gòu)如圖4所示。
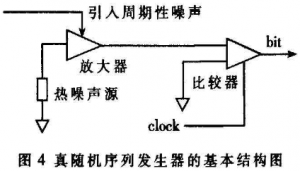
加密單元每次上電重新啟動后,真隨機(jī)序列產(chǎn)生器都會得到一組不同的真隨機(jī)序列,經(jīng)提取后得到此次通信的會話密鑰Ks,地面站將會話密鑰Ks發(fā)至解密單元相應(yīng)存儲模塊后,機(jī)載解密單元將Ks與自己的基本密鑰作用生成與地面站完全相同的初始密鑰。這時,密鑰變換器按照同樣的時鐘工作開始,保證加密密鑰與解密密鑰的一致。
2、加密解密流程及其幀結(jié)構(gòu)的設(shè)計
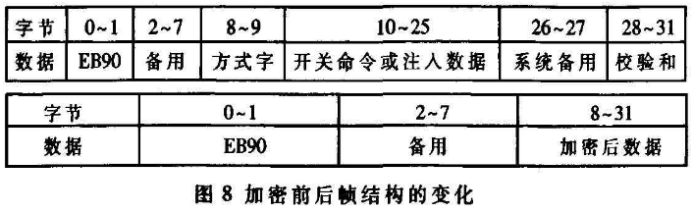
結(jié)合上文遙控指令的構(gòu)成方式及其加密、解密密的需要,本文設(shè)計的遙控指令幀結(jié)構(gòu)如圖5所示。

同步頭都是選擇自相關(guān)特性好、并且在密文數(shù)字序列中出現(xiàn)概率較小的碼型,這樣有利于在接收端進(jìn)行同步檢測,并防止在信息流中頻繁出現(xiàn)與同步頭相同的碼型,造成接收端的虛假同步。同時還要防止信道誤碼對同步頭干擾造成漏同步的情況發(fā)生,因此,必須對同步頭的傳輸采用容錯技術(shù)或前向糾錯技術(shù)的處理,以確保接收端能夠正確判別出同步頭信號。在本設(shè)計中,同步頭選擇IRIG(lnter-Range Instrumentation Group)推薦的最佳16位碼EB90;方式字、開關(guān)命令或注入數(shù)據(jù)、系統(tǒng)備用部分及校驗和需要進(jìn)行加密處理,共需24B的密鑰,即密鑰單元中的每組密鑰為192bit。
以下將結(jié)合遙控指令的加密過程詳細(xì)闡述不同場合下使用的不同遙控幀結(jié)構(gòu)。
無人機(jī)通信過程包括了兩個環(huán)境:地面站相對安全的環(huán)境和飛行區(qū)域安全威脅較大的環(huán)境。各通信終端設(shè)備在地面站內(nèi)完成保密單元初始化,在開始保密通信前,無人機(jī)與地面站之間進(jìn)行相互認(rèn)證,由地面站發(fā)起。
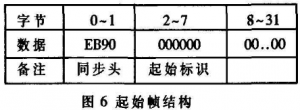
起始幀用于表示保密通信的開始,機(jī)載解密單元無論何時接收到該幀,都要進(jìn)行解密單元的重新初始化,并將該幀回傳至地面站,以通知地面站機(jī)載設(shè)備已準(zhǔn)備就緒。起始幀結(jié)構(gòu)如圖6所示。
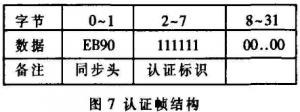
認(rèn)證握手幀用于數(shù)據(jù)交互前的相互認(rèn)證,同樣以互發(fā)認(rèn)證幀的形式實現(xiàn)a認(rèn)證幀結(jié)構(gòu)如圖7。
(1)加密單元工作流程
當(dāng)機(jī)載單元通過遙測信道回傳地面站正確的應(yīng)答后,地面站加密單元進(jìn)入工作狀態(tài)。首先進(jìn)行同步頭的搜索,當(dāng)連續(xù)搜索到尼個(用戶可設(shè)定)同步頭時,電路進(jìn)入鎖定狀態(tài),控制單元提取遙控幀中8~31字節(jié)的數(shù)據(jù)送至加密運(yùn)算器1號緩存-同時讀取密鑰單元192bit加密密鑰送至加密運(yùn)算器2號緩存和密鑰變換單元,加密運(yùn)算器分別讀取兩個緩存數(shù)據(jù)完成加密(算法已初始化);密鑰變換單元在密算法的作用下生成下一幀的加密密鑰(加密密鑰的生成時間小于一幀遙控幀的加密時間)。最后由控制單元完成對遙控幀的組合。圖8為加密前后幀結(jié)構(gòu)的變化。
(2)解密單元工作流程
解密單元同樣首先進(jìn)行同步頭的搜索,進(jìn)入電路鎖定狀態(tài)后,控制單元首先提取判斷2—7字節(jié)是否為全0或全1數(shù)據(jù),若不是則提取幀中的8~31字節(jié)數(shù)據(jù)送至解密運(yùn)算器的2號緩存,同時將密鑰單元中儲存的192bit解密密鑰輸出到解密運(yùn)算器1號緩存和密鑰變換單元,解密運(yùn)算器提取1、2號緩存數(shù)據(jù)完成解密;密鑰變換單元在解密遙控幀的時間內(nèi)完成對下一次通信解密密鑰的生成并將其儲存于密鑰單元。
3、密碼同步方案
密碼同步技術(shù)是基于序列密碼加密的數(shù)字通信系統(tǒng)中非常重要的技術(shù),目的是為了在通信過程中,保證通信雙方加解密的起點嚴(yán)格一致。
密碼同步工作狀態(tài)的建立一般是在保密設(shè)備首先建立位同步的情況下進(jìn)行,位同步可以由信源終端或信道設(shè)備直接提供的時鐘來實現(xiàn),也可以通過從信源終端或信道傳輸設(shè)備提供的數(shù)字流中提取時鐘來實現(xiàn)A選擇信源終端提供的時鐘還是選擇信道傳輸設(shè)備提供的時鐘,應(yīng)服從數(shù)字通信系統(tǒng)的總體時鐘同步關(guān)系的安排Q位同步的作用是指示比特的開始和結(jié)束,這里不作詳細(xì)討論。
在本設(shè)計中,密鑰變換器在統(tǒng)一的時鐘驅(qū)動下工作,利用這種方式可以保證只要系統(tǒng)實現(xiàn)了正確的幀同步,即對同步頭的正確搜索,則密碼同步也同時實現(xiàn)。同步頭的搜索過程如圖9所示。
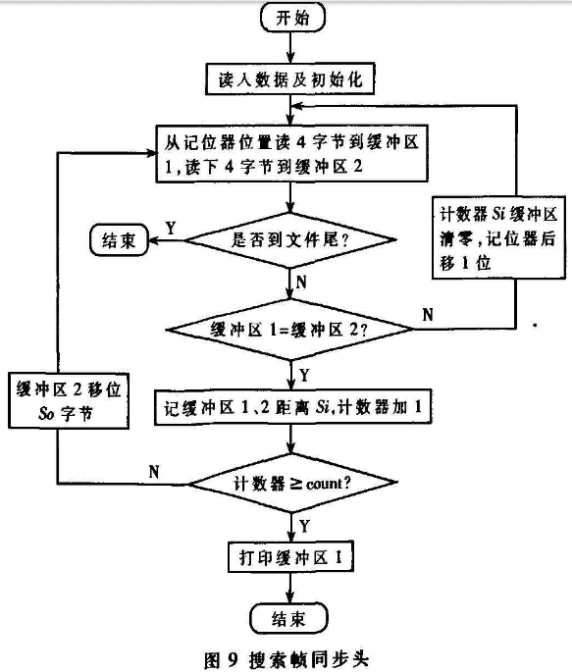
在數(shù)據(jù)流存在誤碼(由噪聲或干擾引起)的情況下,通過某些抗誤碼算法正確地找到并保持每一幀的開始位置,這就是鎖定幀同步過程。只有正確鎖定幀同步后,才可以在每一幀里正確地分析幀的結(jié)構(gòu)。鎖定幀同步步驟如下:
(1)搜索階段:用數(shù)據(jù)流和幀同步碼進(jìn)行相關(guān)運(yùn)算的方法在數(shù)據(jù)流中搜索幀同步碼。數(shù)據(jù)流向左移位,每次移1位后與幀同步碼模板比較一次。當(dāng)數(shù)據(jù)流中的幀同步碼與幀同步碼模板位置重合、且由誤碼率引起的誤碼數(shù)目不超過口時,認(rèn)為搜索到幀同步碼。
(2)驗證階段:找到幀同步碼后,以一幀為周期,驗證是否在連續(xù)若干幀中周期性地出現(xiàn)同步碼。
(3)假定以上兩個階段共進(jìn)行G幀,其中搜索和證幀碼時容錯數(shù)均為a(允許有a位碼與幀碼不符,a≤n)。如果連續(xù)G幀都找到了幀同步碼,這時進(jìn)入幀同步鎖定階段,可以對遙控指令進(jìn)行處理,但是每一幀仍然要周期性地檢查幀同步碼,這時容錯數(shù)為k(k≤n),當(dāng)連續(xù)L幀都未發(fā)現(xiàn)幀同步碼時,幀同步解鎖,停止處理數(shù)據(jù),重新進(jìn)入搜索階段。這樣處理,可以保證在出現(xiàn)假鎖(指把數(shù)據(jù)碼誤認(rèn)作幀同步碼而鎖定假幀同步)或遙控指令流終止時能及時退出鎖定狀態(tài),防止繼續(xù)對虛假遙控指令進(jìn)行處理。
審核編輯:湯梓紅
-
發(fā)射器
+關(guān)注
關(guān)注
6文章
877瀏覽量
54365 -
PWM
+關(guān)注
關(guān)注
116文章
5439瀏覽量
218598 -
通信系統(tǒng)
+關(guān)注
關(guān)注
6文章
1224瀏覽量
54006 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10780瀏覽量
185998 -
微波信號
+關(guān)注
關(guān)注
0文章
48瀏覽量
7684
原文標(biāo)題:無人機(jī)通信系統(tǒng)知識點總結(jié)
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
【云智易申請】智能無人機(jī)通信
普及無人機(jī)知識
普及無人機(jī)知識
無人機(jī)偵測和反制系統(tǒng)
無人機(jī)基本知識大攻略
無人機(jī)類型之植保無人機(jī),帶你了解什么是植保無人機(jī)?
常見的無人機(jī)基礎(chǔ)知識問答
無人機(jī)探測技術(shù)
無人機(jī)飛控系統(tǒng)
大神淺談無人機(jī)飛控軟件設(shè)計 系統(tǒng)性總結(jié) 精選資料推薦
反無人機(jī)技術(shù)的研發(fā),無人機(jī)反制設(shè)備成為熱門產(chǎn)品
無人機(jī)反制設(shè)備的原理是什么?
高一數(shù)學(xué)知識點總結(jié)
高二數(shù)學(xué)知識點總結(jié)
嵌入式知識點總結(jié)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論