 UWB的定位算法簡單介紹
UWB的定位算法簡單介紹

根據上一篇的介紹,UWB的定位算法可以分為三類:基于接收信號的強度(RSS,Received Signal Strength)、基于到達角度(Angle of Arrival)、基于到達時間(TOA,Time of Arrival)。不管是什么方式,其技術實現大致是一樣的:都是通過測量接收信號中的某些特征值,比如信號強度、角度、時間等,再采用相關算法來實現對目標的定位。下面分別介紹這三類算法:
RSS的原理是通過坐標位置已知的探測器測量待測目標所在位置的信號強度,由于信號強度與信號衰減滿足一定的關系,可以利用它來估算出待測目標到當前測量探測器的距離。其定位原理與TOA相同,只是獲取距離的方法不一樣,對于RSS,其測量的距離和衰減之間的關系依賴于信道特性,所以具有一個精確的傳輸模型是可靠估計距離的前提。然而未知環境下,其信號的傳輸模型未知,因而其定位誤差通常較大。
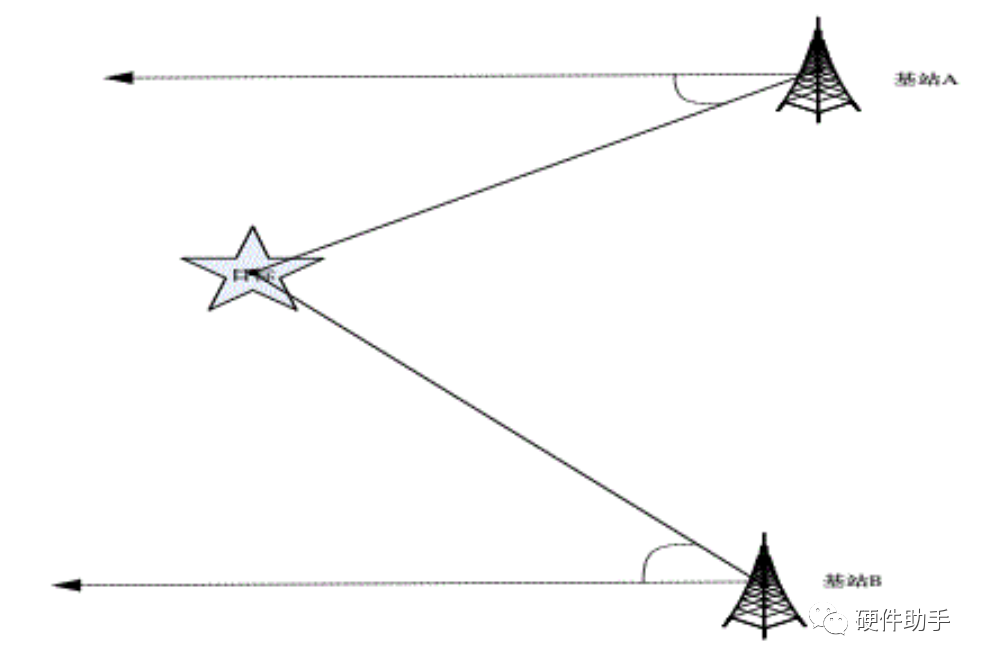
AOA定位是通過基站A和基站B的接收天線或天線陣列,分別測量出A、B與目標之間的角度值,該角度使接收機到移動臺組成一條射線,該角度稱為方位角,該射線稱為方位線。使用兩個或兩個以上的AOA方位線,即可得出多條射線的交點,該交點幾位待測目標的估計位置。
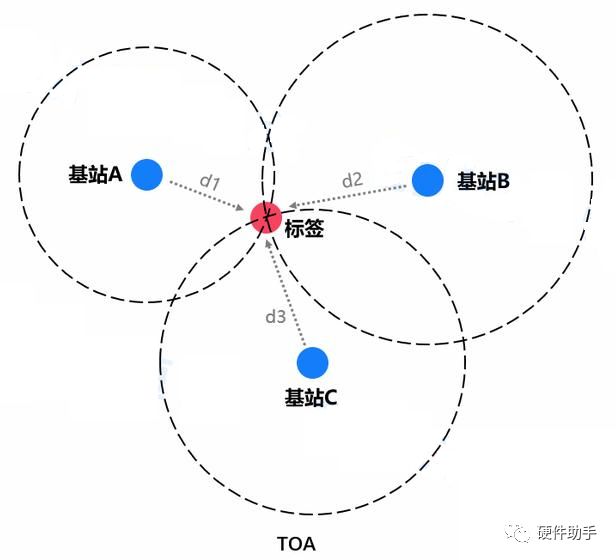
TOA定位法是通過獲得N個位置已知的基站和待測目標之間的直線距離(測量兩點之間的距離,主要有兩種方法,一種是測量兩點之間的傳播時間(也就是TOF),另一種是測量到達信號的場強變化(也就是RSS)),根據幾何原理實現定位。為了實現對待測目標的定位,在無先驗知識的情況下,需要基站的數量至少為三個,以三個基站的位置坐標為圓心,他們分別與待測目標之間的距離為半徑畫圓,在無NLOS誤差的情況下,待測目標必然在三個圓的交點上。
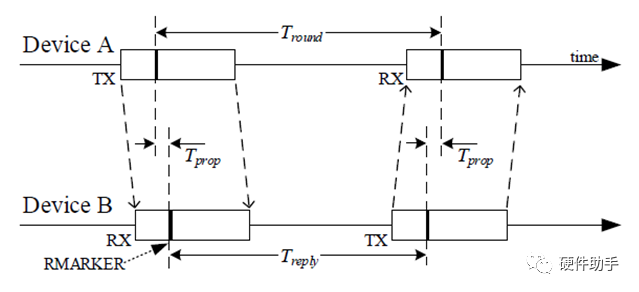
TOF的實現方式是需要目標和基站之間進行兩次TOA估算,并減去中間處理時間得到目標和基站之間的往返時間。其定位原理和TOA相同,有點在于需要兩個節點之間有共同的時鐘。因為他是通過測量一個節點收發信息的往返時間來估計兩點之間的距離。
由于TOF在實際應用中有各種各樣的問題,比如由于設備B時鐘源的自我偏差PPM會導致每次Tdelay的不一致性等等。因此TOF也有很多變種,比如RTOF(也叫TW-TOF或者DS-TWR)這種不需要同步的方式,也有TDOA這種需要系統有精確的時間同步功能。
TW-TOF是TOF(也叫SS-TWR)的一種擴展測距方法,記錄了兩個往返的時間戳,最后得到飛行時間,雖然增加了響應的時間,但會降低測距誤差。雙邊雙向測距根據發送消息個數不同,分為兩種方法:
- 4消息方式(4 messages)
- 3消息方式(3 messages)
雙邊雙向測距4消息方式分為兩次測距,設備A主動發起第一次測距消息,設備B響應,得到4個時間戳;然后過了一段時間,設備B主動發起測距,設備A響應,同樣得到4個不同的時間戳。
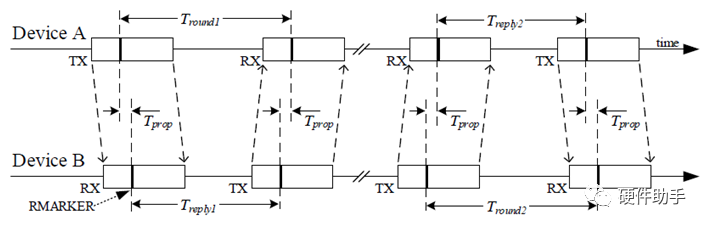
雙邊雙向測距3消息方式相比較于4消息方式,省掉了第二次測距的發起動作,當設備A收到數據之后,立刻返回數據,最終也可以得到四個時間差。
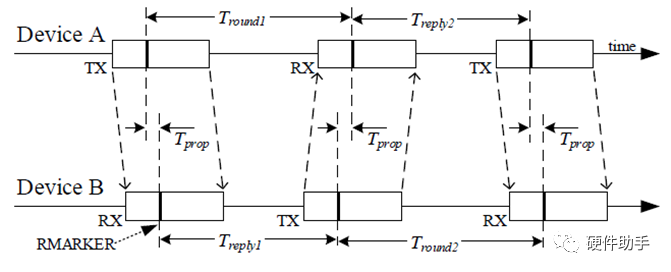
得到四個時間戳就可以根據下面的公式進行計算了:

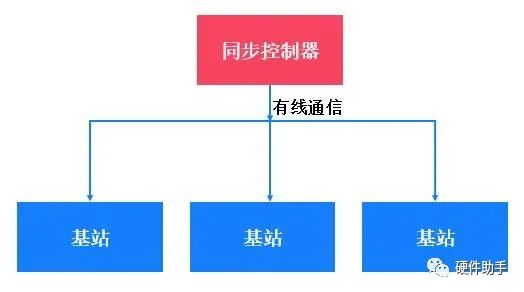
TDOA是基于到達時間差定位,系統中需要有精確時間同步功能。時間同步有兩種:
一種是通過有線做時間同步,同步精度非常高,能控制到0.1ns,但由于采用有線,所有設備要么采用中心網絡的方式,要么采用級聯的方式,但增加了網絡維護的復雜度,也增加了施工的復雜度,成本較高。并且,系統中還有一個專用的有線時間同步器,價格比較貴。
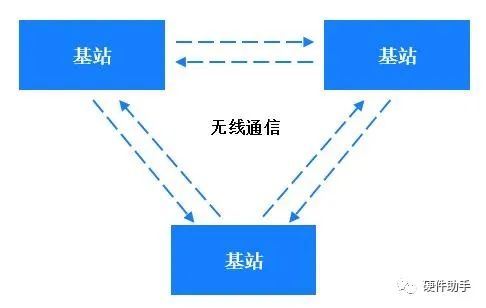
另一種是通過無線做時間同步,采用無線同步一般可以達到0.25ns,精度稍遜于有線時間同步,但其UWB定位系統相對來說更為簡單,定位基站只需要供電,數據回傳可以采用WiFi的方式,有效降低了成本。
TDOA定位不必要進行基站和移動終端之間的同步,而只需要基站之間進行同步。因為基站的位置是固定的,基站之間進行同步與基站和移動終端之間進行同步要容易實現得多。這使得TDOA定位比TOA定位要更加容易實現,所以TDOA定位的應用非常廣泛。
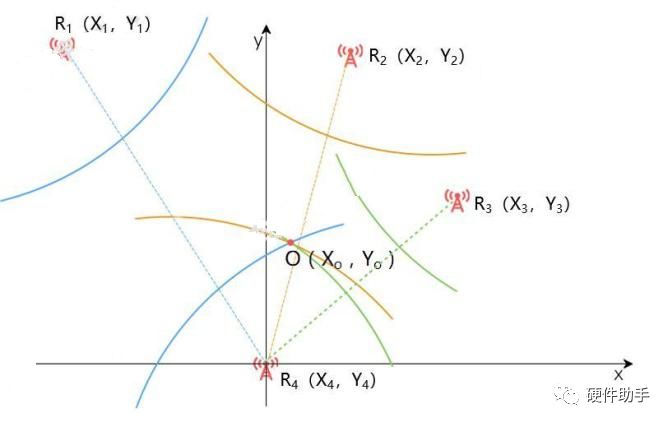
TDOA定位在二維定位中需要使用4個定位基站。基站時間同步之后,標簽發送一個廣播報文,基站收到之后,標記接收到此報文的時間戳,并將內容發送到計算服務器,計算服務器根據其他基站的定位報文的時間戳,計算出被定位目標的位置。
通過測量標簽到每兩個基站之間的距離差,距離差等于常量即可繪制出雙曲線,而曲線交點即可確定標簽坐標。該方法實現過程中,標簽只需要廣播一次UWB信號即可,因此有利于標簽的功耗及標簽并發數量。
-
RSS
+關注
關注
1文章
34瀏覽量
12603 -
UWB
+關注
關注
32文章
1169瀏覽量
62529 -
定位算法
+關注
關注
0文章
61瀏覽量
15249
發布評論請先 登錄





 工商網監
工商網監
評論