 一文看盡SLAM創新點的前世今生
一文看盡SLAM創新點的前世今生
將一個機器人放入未知環境中的未知位置,是否有辦法讓機器人一邊逐步描繪出此環境完全的地圖,同時一邊決定機器人應該往哪個方向行進?
SLAM(simultaneous localization and mapping)全稱即時定位與地圖構建或并發建圖與定位,它主要的作用就是讓機器人在未知的環境中,完成定位(Localization),建圖(Mapping)和路徑規劃(Navigation)。由于其重要的理論與應用價值,被很多學者認為是實現真正全自主移動機器人的關鍵。目前,SLAM技術被廣泛運用于機器人、無人機、無人駕駛、AR、VR等領域。
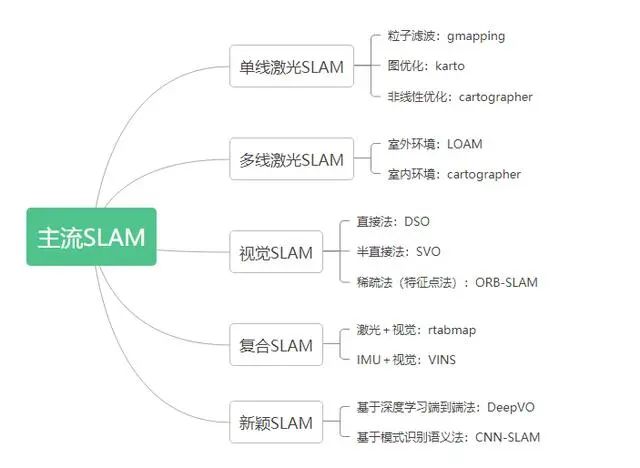
主流的slam技術應用有兩種,分別是激光slam(基于激光雷達lidar來建圖導航)和視覺slam(vslam,基于單/雙目攝像頭視覺建圖導航)。
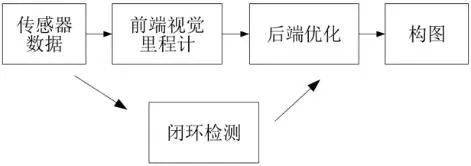
經典的SLAM系統一般包含前端視覺里程計、后端優化、閉環檢測和構圖四個主要部分。
很多同學都覺得Slam方向難以入門,也難以學深。但其實相對來講,不像其他很多方向,很多的東西大家都已經做了,并且做的很不錯,要想發論文或者找創意突破比較吃力。slam方向還有很多深層次的多領域結合應用的內容還比較少,并且slam更深的內容還有很多東西需要做。
在機器人slam、無線感知、多模態融合、智能視覺領域有深厚落地經驗的Wills老師,將系統性為大家講解機器人導航相關技術,并帶大家分析slam創新點的前世今生。
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29568瀏覽量
211975 -
SLAM
+關注
關注
24文章
437瀏覽量
32380 -
激光雷達
+關注
關注
971文章
4212瀏覽量
192275
原文標題:一文看盡SLAM創新點的前世今生
文章出處:【微信號:CVer,微信公眾號:CVer】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
恩智浦智能家電創新方案一文看盡 恩智浦智能家電技術日給你答案
,深入探討了“如何促進傳統電器向智能家電轉變”這一重要課題,并展示了基于恩智浦豐富的產品組合,面向智能家電應用而打造的數十款創新解決方案。 ? ? ? 活動中展示的智能家電解決方案,基于恩智浦的MPU / MCU、無線連接、電源管

一種基于點、線和消失點特征的單目SLAM系統設計
本文提出了一種穩健的單目視覺SLAM系統,該系統同時利用點、線和消失點特征來進行精確的相機位姿估計和地圖構建,有效解決了傳統基于點特征的SLAM

一文詳解無線電波的前世今生
在忙碌一天后,您回到裝有智能家居設備的家里。手機會自動連接到本地網絡,室內溫度也很舒適,不冷也不熱。當您坐在最喜歡的沙發上,插上耳機準備聆聽一首動聽的樂曲的時候,家里人走過來讓您連接設備共享給他一

開源項目是怎么練成的:Horizen EDA 的前世今生
。? ” ? 有興趣的小伙伴可以先看下作者 Lucas 在 FOSDEM 上的演講: Horizen 簡介 和 KiCad 一樣,Horizen 也是一個 PCB 設計套件,包括元器件管理、原理圖繪制和 PCB
安泰功率放大器應用:納米材料的前世今生
,因此在各個領域具有廣泛的應用前景。那么你知道納米材料是如何被發現,又是如何走入我們的生活,獲得長足發展的嗎?今天Aigtek安泰電子帶大家詳細了解一下。 納米材料的前世今生 1861年,隨著膠體化學的建立,科學家們開始了對直徑
一種基于MASt3R的實時稠密SLAM系統
本文提出了一種即插即用的單目SLAM系統,能夠在15FPS的幀率下生成全局一致的位姿和稠密幾何圖形。 01 ? 本文核心內容 視覺SLAM乃是當今機器人技術與增強現實產品的基礎性構建模
用于SLAM中點云地圖綜合評估的開源框架
在SLAM中評估大規模的點云地圖仍頗具挑戰,主要原因在于缺乏統一、穩健且高效的評估框架。本文提出了MapEval,這是一個用于點云地圖綜合評
利用VLM和MLLMs實現SLAM語義增強
語義同步定位與建圖(SLAM)系統在對鄰近的語義相似物體進行建圖時面臨困境,特別是在復雜的室內環境中。本文提出了一種面向對象SLAM的語義增強(SEO-SLAM)的新型


深入了解Java泛型——從前世今生到PECS原則
本文主要介紹泛型誕生的前世今生,特性,以及著名PECS原則的由來。 在日常開發中,必不可少的會使用到泛型,這個過程中經常會出現類似“為什么這樣會編譯報錯?”,“為什么這個列表無法添加

最新圖優化框架,全面提升SLAM定位精度
同時定位與地圖構建(SLAM)是一項關鍵技術,允許移動機器人在部分或完全未知的環境中自主導航。它包括使用機載傳感器同時估計機器人狀態和構建傳感器檢測到的環境地圖。SLAM可以根據傳感器和地圖構建技術

激光雷達在SLAM算法中的應用綜述
一、文章概述 1.1 摘 要 即時定位與地圖構建(simultaneous localization and mapping,SLAM)是自主移動機器人和自動駕駛的關鍵 技術之一,而激光雷達則是支撐

MG-SLAM:融合結構化線特征優化高斯SLAM算法
信息和提供準確的全局重建方面表現出顯著的進步,而傳統系統則基于稀疏點云或體素。然而,NeRF 方法仍然存在過度平滑、場景表示受限和計算效率低下等缺點。最近,基于高斯的 SLAM已成為一種利用體積輻射場

從算法角度看 SLAM(第 2 部分)
作者: Aswin S Babu 正如我們在[第 1 部分]中所討論的,SLAM 是指在無地圖區域中估計機器人車輛的位置,同時逐步繪制該區域地圖的過程。根據使用的主要技術,SLAM 算法可分為三種







 工商網監
工商網監
評論