") SEDNet:視差和不確定性聯(lián)合評估的新方法
SEDNet:視差和不確定性聯(lián)合評估的新方法

本文提出了一種新的深度立體匹配中用于聯(lián)合視差和不確定性估計的損失函數(shù)。在神經(jīng)網(wǎng)絡(luò)中加入KL散度項,要求不確定性分布匹配視差誤差分布,以實(shí)現(xiàn)精確的不確定性估計。使用可微的軟直方圖技術(shù)來近似分布,并在損失函數(shù)中使用。該方法在大型數(shù)據(jù)集上獲得了顯著的改進(jìn)。作為cvpr2023最新的文章,非常值得閱讀一下。
1 前言
本文提出了SEDNet,一種用于視差和基礎(chǔ)不確定性聯(lián)合估計的深度網(wǎng)絡(luò)。SEDNet包括一個新穎的、輕量級的不確定性估計子網(wǎng)絡(luò),將不確定度的分布與視差誤差的分布相匹配。為了生成這個新的損失函數(shù)的輸入,作者使用可微的軟直方圖技術(shù)以可微分的方式近似分布。在具有真實(shí)值的大型數(shù)據(jù)集上對SEDNet的視差估計和不確定度預(yù)測的性能進(jìn)行了廣泛的實(shí)驗驗證。SEDNet優(yōu)于具有相似架構(gòu)但沒有提出的損失函數(shù)的基線。
主要貢獻(xiàn)是:
一個新穎的不確定性估計子網(wǎng)絡(luò),從視差子網(wǎng)絡(luò)生成的中間多分辨率視差圖中提取信息。
一種可微的軟直方圖技術(shù),用于近似視差誤差和估計不確定性的分布。
一種基于KL散度的損失,應(yīng)用于使用上述技術(shù)獲得的直方圖。
2 相關(guān)背景
立體匹配網(wǎng)絡(luò)在一種稱為成本體積(cost volume)的體積上運(yùn)行,該體積在每個像素處匯聚每個可能視差處的二維特征,并可以通過相關(guān)或串聯(lián)來構(gòu)建。DispNetC、iResNet和SegStereo等基于相關(guān)的網(wǎng)絡(luò)生成兩個視圖中提取的特征的單通道相關(guān)地圖,在各視差層中,利用有效的計算流程犧牲結(jié)構(gòu)和語義信息在特征表示中。GCNet、PSMNet和GANet等基于串聯(lián)的網(wǎng)絡(luò)在成本體積的對應(yīng)元素所指定的視差處組裝兩個視圖的特征。這有助于學(xué)習(xí)上下文特征,但需要更多的參數(shù)以及一個后續(xù)的聚合網(wǎng)絡(luò)。在置信度估計方面,將置信度和不確定度區(qū)分開來,包括置信度CNN、PBCP、EFN、LFN和MMC等方法,以及ConfNet、LGC和LAF等利用圖像和視差圖作為輸入的方法。KL散度用于測量變分推斷估計的網(wǎng)絡(luò)參數(shù)分布的近似和精確后驗分布之間的距離。(需要注意的是,在分配離散度誤差的分布上,作者使用了KL散度來實(shí)現(xiàn)完全不同的目的。)
3 方法
本文旨在聯(lián)合估計視差和不確定性,通過最小化預(yù)測不確定性和實(shí)際視差誤差之間的差異來訓(xùn)練網(wǎng)絡(luò)。其中,預(yù)測模型的損失函數(shù)為KL散度損失,用于匹配誤差分布和不確定性分布。立體匹配網(wǎng)絡(luò)通過學(xué)習(xí)聯(lián)合公式預(yù)測比單獨(dú)的視差估計器更準(zhǔn)確的視差。
3.1 Aleatoric Uncertainty Estimation - 隨機(jī)不確定性估計
為了預(yù)測不確定性并降低噪聲的影響,Kendall和Gal通過最小化模型輸出的負(fù)對數(shù)似然來實(shí)現(xiàn)像素級的預(yù)測。模型假設(shè)輸出服從高斯分布。Ilg等人的后續(xù)工作表明,預(yù)測的分布可以分別模擬為拉普拉斯分布或高斯分布,具體取決于是對視差估計采用L1損失還是L2損失。由于作者采用的是前者,因此可以將預(yù)測模型表示為:
為了模擬算法不確定性,Kendall和Gal引入了像素特定的噪聲參數(shù)σ(i)。作者采用了Ilg等人在構(gòu)建拉普拉斯模型時使用的方法,并獲得了以下像素級損失函數(shù):
該式可以被視為魯棒損失函數(shù),其中像素的殘差損失受其不確定性的影響而減弱,而第二項則作為正則化項。訓(xùn)練網(wǎng)絡(luò)來預(yù)測觀測噪聲標(biāo)量的對數(shù)s,以保證數(shù)值穩(wěn)定性。
3.2 Matching the Distribution of Errors - 誤差分布的匹配
這部分作者討論了調(diào)整不確定性分布以匹配誤差分布的問題。采用KL散度作為衡量二者之間差異的度量,但直接最小化KL散度需要兩個分布的歸納公式。為此作者使用直方圖來表示分布,同時采用軟直方圖使其可微分。對于每個批次訓(xùn)練,基于誤差值的統(tǒng)計量創(chuàng)建一個直方圖。作者對獨(dú)立的不確定性采用相同的直方圖參數(shù),并使用反比例權(quán)重的softmax函數(shù)來計算每個誤差值或不確定性貢獻(xiàn)的直方圖值。最后,該直方圖的KL損失用于網(wǎng)絡(luò)的訓(xùn)練。
3.3 SEDNet
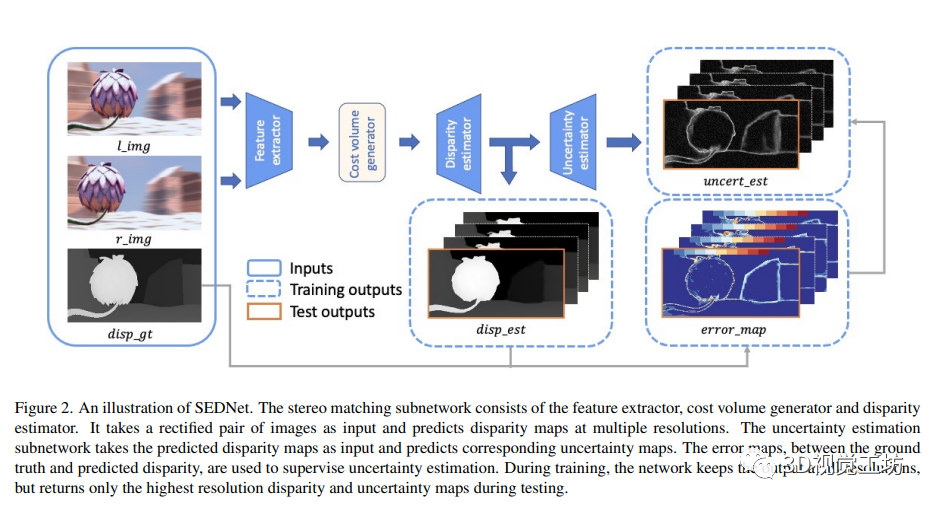
SEDNet是一個包括視差估計和不確定性估計子網(wǎng)絡(luò)的網(wǎng)絡(luò)體系結(jié)構(gòu)。其中視差估計子網(wǎng)絡(luò)采用GwcNet,GwcNet子網(wǎng)絡(luò)使用類似ResNet的特征提取器從圖像中提取特征,生成代價體積,并使用soft-argmax運(yùn)算符為像素分配視差。視差預(yù)測器的輸出模塊在不同分辨率下生成K個視差圖。不確定性估計子網(wǎng)絡(luò)學(xué)習(xí)預(yù)測每個像素的觀測噪聲標(biāo)量的對數(shù)誤差。為了計算不確定性圖像,作者提出了使用像素對差分向量(PDV)的多分辨率視差預(yù)測的新方法。視差估計器輸出的視差圖首先進(jìn)行上采樣處理,然后進(jìn)行成對差分以形成PVD。其中,PVD表示像素對之間的視差差異。
3.4 Loss Function - 損失函數(shù)
本文所使用的損失函數(shù)由兩部分組成:對數(shù)似然損失和KL散度損失。其中對數(shù)似然損失用于優(yōu)化誤差和不確定性,KL散度損失用于匹配不確定性分布和誤差。總損失將所有視差和不確定性圖像考慮在內(nèi),上采樣到最高分辨率,并通過每個分辨率級別的系數(shù)對不同分辨率級別的對數(shù)似然損失和KL散度損失進(jìn)行加權(quán)計算。
4 實(shí)驗
4.1 數(shù)據(jù)集和評估指標(biāo)
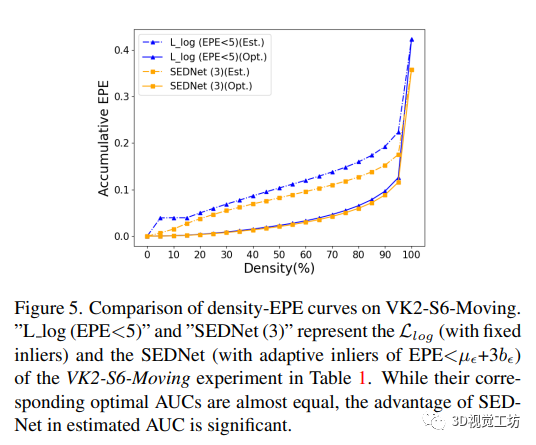
這部分作者介紹了多個用于立體圖像深度估計的數(shù)據(jù)集和評估指標(biāo)。其中SceneFlow、Virtual KITTI 2和DrivingStereo是當(dāng)前被廣泛使用的三個數(shù)據(jù)集。作者使用端點(diǎn)誤差(EPE)和異常值百分?jǐn)?shù)(D1)來評估視差估計的準(zhǔn)確度,并使用密度-EPE ROC曲線和曲線下的面積(AUC)來評估不確定性估計。本文還比較了SEDNet和三個基線:原始GwcNet、LAF-Net和僅使用對數(shù)似然損失的SEDNet。
4.2 實(shí)施細(xì)節(jié)
作者在PyTorch中實(shí)現(xiàn)了所有網(wǎng)絡(luò),并對所有實(shí)驗使用了Adam優(yōu)化器,其中β1 = 0.9,β2 = 0.999。在所有模型過擬合之前停止訓(xùn)練。
在VK2數(shù)據(jù)集上的實(shí)驗是在兩個NVIDIA RTX A6000 GPU上執(zhí)行的,每個GPU都帶有48GB的RAM。對于此數(shù)據(jù)集,使用初始學(xué)習(xí)率為0.0001從頭訓(xùn)練了所有模型,在每10個epoch后降低了5個。在訓(xùn)練過程中,從圖像中隨機(jī)裁剪了512×256的補(bǔ)丁。在測試期間,在VK2的完整分辨率上評估。
歡迎關(guān)注微信公眾號「3D視覺工坊」,加群/文章投稿/課程主講,請加微信:dddvisiona,添加時請備注:加群/投稿/主講申請
方向主要包括:3D視覺領(lǐng)域各細(xì)分方向,比如相機(jī)標(biāo)定|三維點(diǎn)云|三維重建|視覺/激光SLAM|感知|控制規(guī)劃|模型部署|3D目標(biāo)檢測|TOF|多傳感器融合|AR|VR|編程基礎(chǔ)等。
對于DrivingStereo數(shù)據(jù)集(DS),坐這兒也在兩個NVIDIA RTX A6000 GPU上進(jìn)行了實(shí)驗。對于此數(shù)據(jù)集,使用在VK2上預(yù)訓(xùn)練的模型進(jìn)行了兩個實(shí)驗:(1)在DS訓(xùn)練集上進(jìn)行微調(diào),學(xué)習(xí)率從0.0001開始,在第10個epoch后每3個epoch降低2次學(xué)習(xí)率,然后在DS測試集上進(jìn)行領(lǐng)域內(nèi)評估;(2)跳過微調(diào)步驟,并在DS-Weather子集上進(jìn)行跨域評估。在訓(xùn)練期間,作者隨機(jī)裁剪了與VK2實(shí)驗相同大小的輸入。在測試期間,作者對測試樣本進(jìn)行了填充,使其分辨率與VK2相同。
在SceneFlow數(shù)據(jù)集上的實(shí)驗是在一臺具有24 GB內(nèi)存的Nvidia TITAN RTX GPU上進(jìn)行的。作者從半分辨率圖像中裁剪了256×128的補(bǔ)丁來限制內(nèi)存消耗,并將初始學(xué)習(xí)率設(shè)置為0.001,在第10個epoch后每2個epoch降低2次學(xué)習(xí)率。
4.3 定性和定量結(jié)果
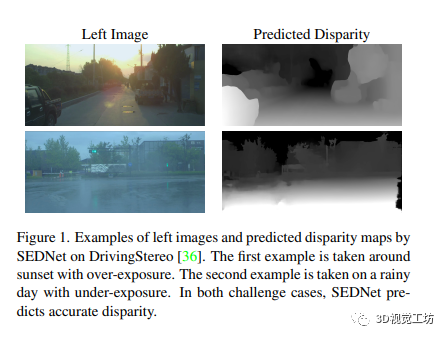
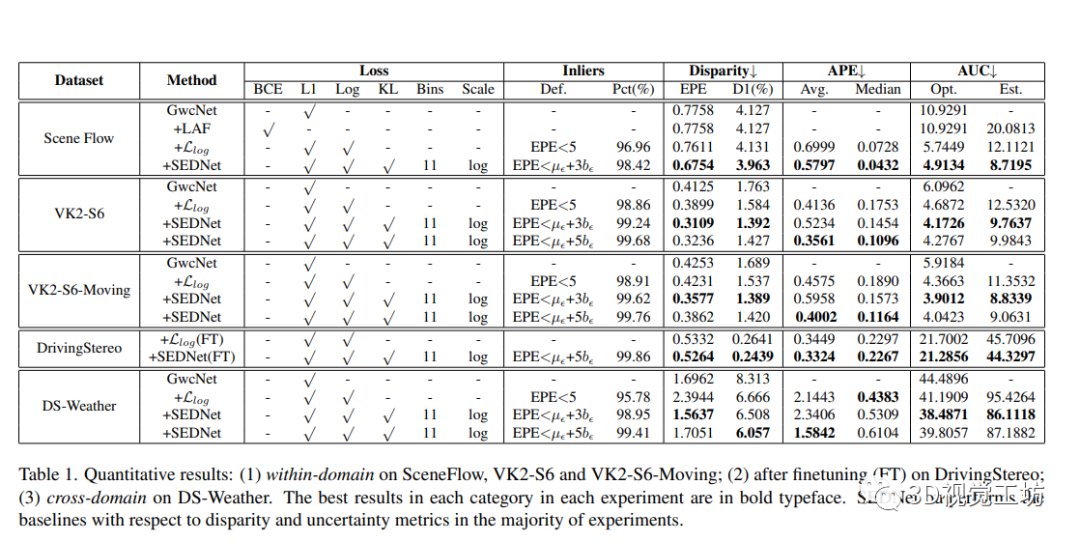
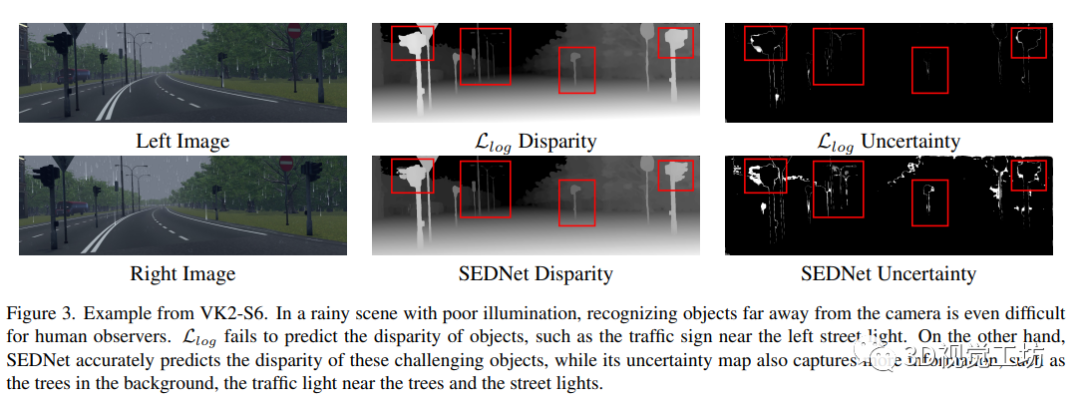
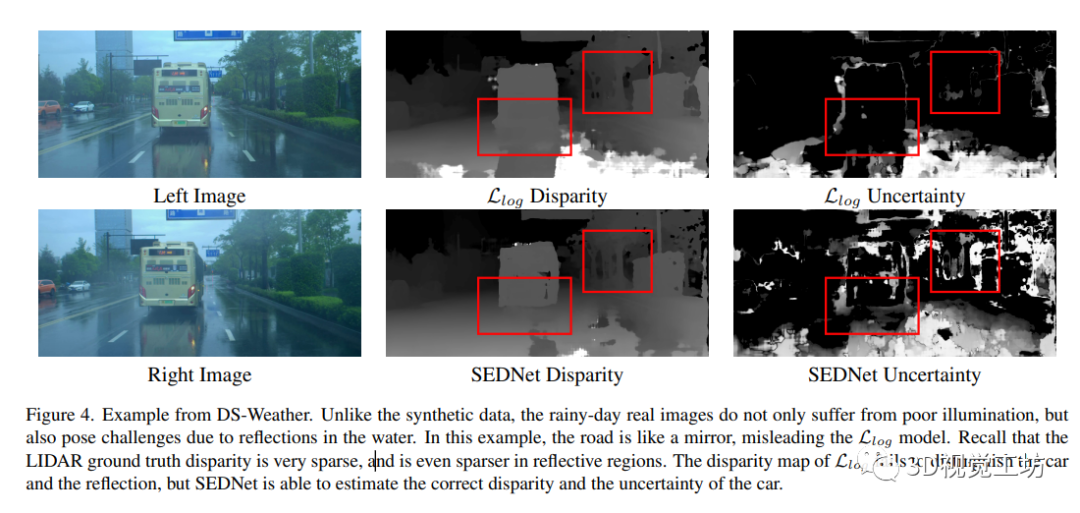
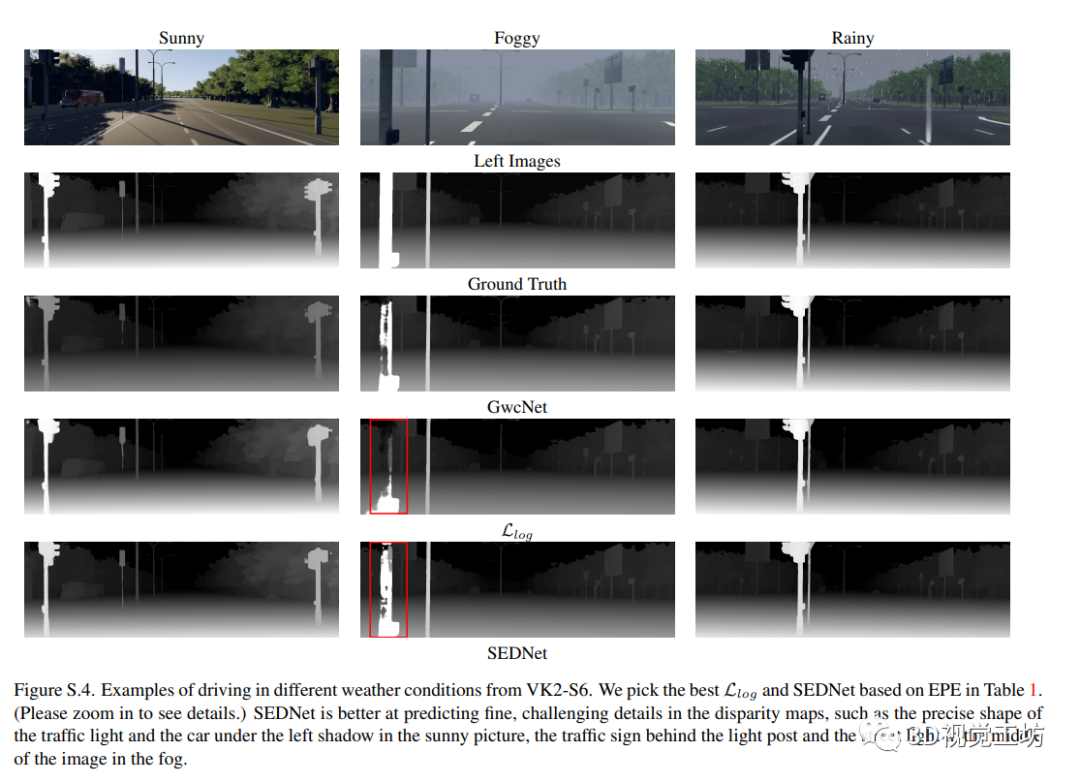
作者進(jìn)行了視差估計和不確定性估計的定量和定性分析,并展示了針對不同實(shí)驗設(shè)置的SEDNet的性能優(yōu)于基線結(jié)果。使用自適應(yīng)閾值的內(nèi)點(diǎn)過濾器使模型在視差和不確定性估計方面表現(xiàn)更好。SEDNet還具有在極端天氣下預(yù)測視差的能力,不受糟糕照明和模糊影響。此外,作者還發(fā)現(xiàn)使用自適應(yīng)閾值進(jìn)行內(nèi)點(diǎn)過濾可以提高網(wǎng)絡(luò)的性能。
4.4 匹配誤差分布
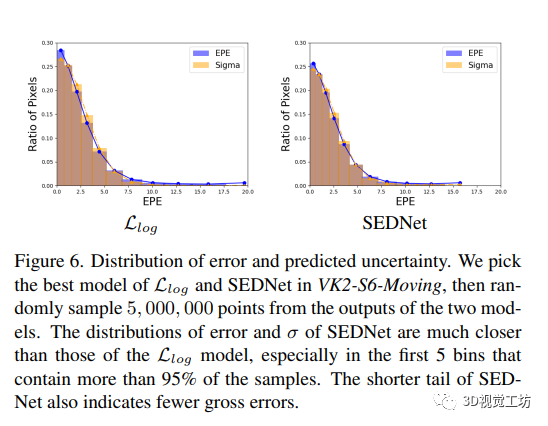
作者提出的能夠更好匹配真實(shí)分布的視差估計和不確定性估計方法SEDNet,表明其在精度和魯棒性方面具有優(yōu)勢。在誤差分布匹配方面,通過比較APE的結(jié)果,驗證了SEDNet的匹配能力。
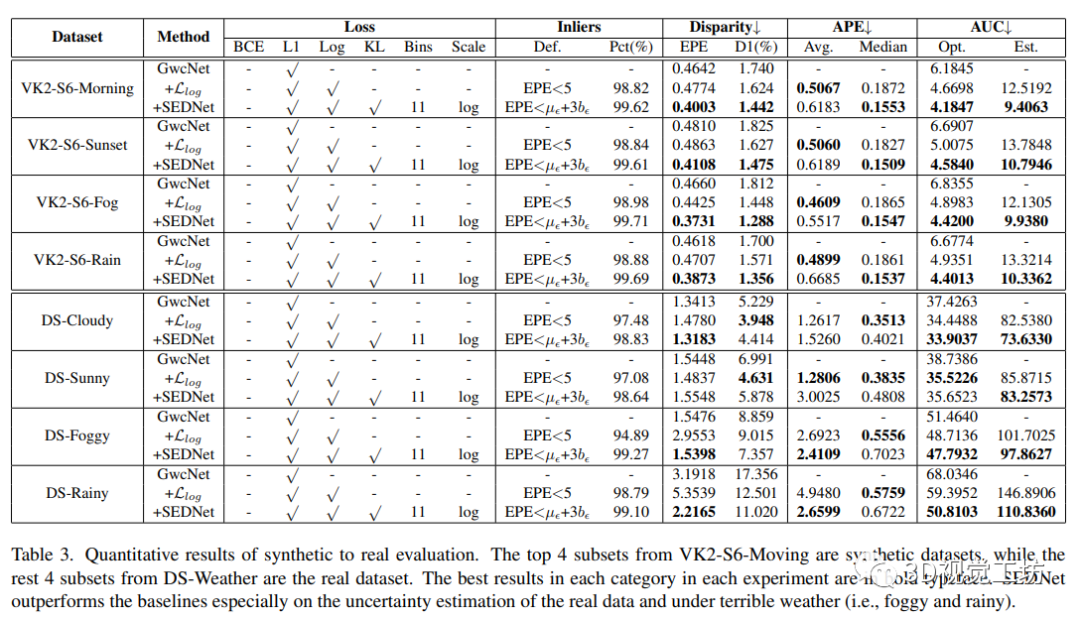
4.5 從合成數(shù)據(jù)到真實(shí)數(shù)據(jù)的泛化
視差匹配網(wǎng)絡(luò)通常在合成數(shù)據(jù)上進(jìn)行訓(xùn)練,并在目標(biāo)域的少量真實(shí)數(shù)據(jù)上進(jìn)行微調(diào),因為獲取帶有真實(shí)深度信息的真實(shí)數(shù)據(jù)成本高且難度大。在本節(jié)中,作者將VK2-S6和DS-Weather的實(shí)驗擴(kuò)展到所有僅在合成數(shù)據(jù)上進(jìn)行訓(xùn)練的方法在看不見的真實(shí)域上的泛化性能進(jìn)行比較。
5 總結(jié)
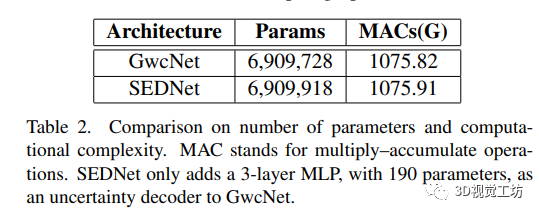
本文提出了一種新的視差和不確定性聯(lián)合評估的方法,其中關(guān)鍵思想是使用基于KLD散度的獨(dú)特?fù)p失函數(shù)來比較視差誤差和不確定性估計的分布情況,通過一種可微的直方圖方案實(shí)現(xiàn),同時引入了僅有190個參數(shù)的不確定性估計子網(wǎng)絡(luò)。實(shí)驗表明,該方法在視差和不確定性預(yù)測方面都取得了比較有效的結(jié)果。和GwcNet相比,即使基本上具有相同的容量和幾乎相同的架構(gòu),SEDNet在視差估計方面表現(xiàn)更好,這歸因于微小的不確定性估計子網(wǎng)絡(luò)。未來研究計劃將該方法同樣應(yīng)用于其他逐像素回歸任務(wù)。
該篇論文介紹了一種視差和不確定性聯(lián)合評估的方法SEDNet,提出了一種可微的直方圖方案來實(shí)現(xiàn)KL散度損失函數(shù),通過匹配視差誤差和不確定性分布來實(shí)現(xiàn)精確的不確定性估計。實(shí)驗表明,該方法在視差和不確定性預(yù)測方面都取得了有效的結(jié)果,并且在視差估計方面表現(xiàn)更好,相比于GwcNet,這歸因于微小的不確定性估計子網(wǎng)絡(luò)。該文章的主要貢獻(xiàn)是引入了一種新穎的不確定性估計子網(wǎng)絡(luò)和使用KL散度的損失函數(shù)來對比視差誤差和不確定性估計的分布情況。SEDNet的實(shí)現(xiàn)對于視覺和深度學(xué)習(xí)領(lǐng)域的研究也有一定的參考意義。
審核編輯 :李倩
-
函數(shù)
+關(guān)注
關(guān)注
3文章
4375瀏覽量
64469 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1223瀏覽量
25330
原文標(biāo)題:CVPR2023|SEDNet:視差和不確定性聯(lián)合評估的新方法
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
去嵌入和不確定性是否使用了正確的設(shè)置
是否可以使用全雙端口校準(zhǔn)中的S11不確定性來覆蓋單端口校準(zhǔn)的不確定性?
N5531S TRFL不確定性
435B-K05輸出不確定性
基于RFID技術(shù)的供應(yīng)鏈管理項目存在哪些不確定性?
運(yùn)算放大器的開環(huán)電壓增益有哪些不確定性?
如何用不確定性解決模型問題
針對自閉癥輔助的不確定性聯(lián)合組稀疏建模方法

深部目標(biāo)姿態(tài)估計的不確定性量化研究
將不確定性感知和姿態(tài)回歸結(jié)合用于自動駕駛車輛定位
科技云報到:數(shù)字化轉(zhuǎn)型,從不確定性到確定性的關(guān)鍵路徑






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論