") 機器魚胸鰭上下擺動功能的實現(xiàn)
機器魚胸鰭上下擺動功能的實現(xiàn)

1. 運動功能說明
本文示例將實現(xiàn)R330樣機機器魚胸鰭能夠靈活的上下擺動的功能。

2. 結(jié)構(gòu)說明
本樣機采用舵機模塊來進行仿生機器魚結(jié)構(gòu)的設計。
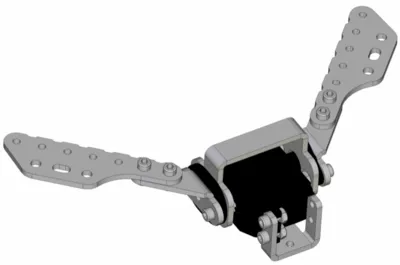 胸鰭
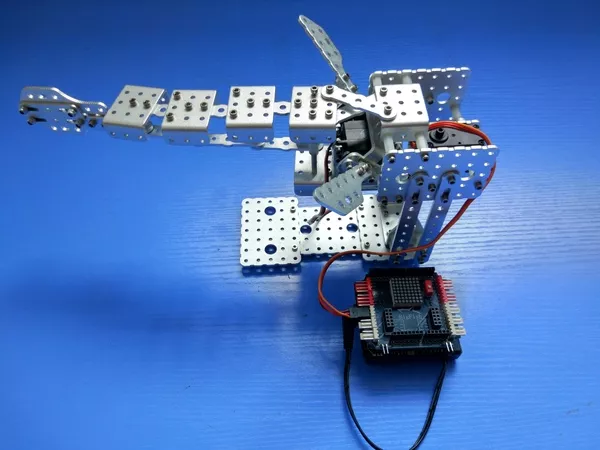
胸鰭 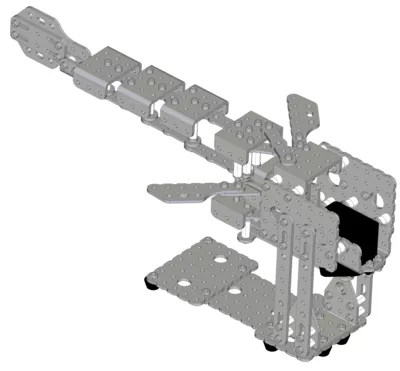 整機
整機
3. 電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra主控板(兼容Arduino Uno)? |
| 擴展板 | Bigfish2.1擴展板? |
| 電池 | 7.4V鋰電池 |
電路連接:將舵機連接在Bigfish擴展板的D4端口。
4. 運動功能實現(xiàn)
編程環(huán)境:Arduino 1.8.19
下面提供一個機器魚胸鰭上下擺動的參考例程(fishQi.ino),例程源代碼詳見(https://www.robotway.com/h-col-236.html),實驗效果可參考網(wǎng)站演示視頻。
/*------------------------------------------------------------------------------------ 版權(quán)說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-05-23 https://www.robotway.com/ ------------------------------*/ #include int _ABVAR_1_angle_current2 = 0 ; int _ABVAR_2_num = 0 ; Servo servo_pin_4; int _ABVAR_3_angle_current1 = 0 ; void up_down(); void down_up(); void setup() { servo_pin_4.attach(4); } void loop() { down_up(); up_down(); } void down_up() { _ABVAR_1_angle_current2 = 30 ; for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ ) { _ABVAR_1_angle_current2 = ( _ABVAR_1_angle_current2 + 5 ) ; servo_pin_4.write( _ABVAR_1_angle_current2 ); delay( 50 ); } } void up_down() { _ABVAR_3_angle_current1 = 110 ; for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ ) { _ABVAR_3_angle_current1 = ( _ABVAR_3_angle_current1 - 5 ) ; servo_pin_4.write( _ABVAR_3_angle_current1 ); delay( 50 ); } }
下面再給大家提供一個機器魚魚尾擺動的參考例程(fishTail.ino),大家可以嘗試改寫一下舵機擺動角度參數(shù),讓機器魚尾能夠靈活的擺動。
/*------------------------------------------------------------------------------------
版權(quán)說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 機器譜 2023-05-23 https://www.robotway.com/
------------------------------*/
#include
int _ABVAR_1_angle_right = 0 ;
int _ABVAR_2_num = 0 ;
Servo servo_pin_4;
int _ABVAR_3_angle_left = 0 ;
void Right_Left();
void left_Right();
void setup()
{
servo_pin_4.attach(4);
}
void loop()
{
left_Right();
Right_Left();
}
void Right_Left()
{
_ABVAR_1_angle_right = 70 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_1_angle_right = ( _ABVAR_1_angle_right + 5 ) ;
servo_pin_4.write( _ABVAR_1_angle_right );
delay( 100 );
}
}
void left_Right()
{
_ABVAR_3_angle_left = 110 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_3_angle_left = ( _ABVAR_3_angle_left - 5 ) ;
servo_pin_4.write( _ABVAR_3_angle_left );
delay( 100 );
}
}
審核編輯黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器魚
+關(guān)注
關(guān)注
0文章
11瀏覽量
3215
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
HarmonyOS實戰(zhàn):快速實現(xiàn)一個上下滾動的廣告控件
上要想實現(xiàn)這樣的功能并不容易,那么在鴻蒙上怎么實現(xiàn)這樣的功能呢?本篇文章教你使用最簡單的方式實現(xiàn)一個支持
PLC遠程上下載網(wǎng)關(guān)具備哪些功能
PLC遠程上下載網(wǎng)關(guān)具備以下功能: 遠程訪問:允許用戶通過網(wǎng)絡遠程登錄到PLC,進行程序的上傳和下載操作。這一功能打破了地域限制,使工程師和管理者可以在遠離工業(yè)現(xiàn)場的地方對PLC進行實時的維護和更新
生產(chǎn)提質(zhì)新利器!單軸測徑儀賦能魚竿、魚線高精檢測
,自動修正線徑偏差。減小線徑波動,減少廢品率。
實時報警與數(shù)據(jù)管理
設備配備聲光報警功能,當檢測到超差(如魚線直徑偏離標稱值)時立即警示,并可通過RS485或模擬量接口將數(shù)據(jù)傳輸至PLC或上位機,實現(xiàn)
發(fā)表于 03-31 14:15
富唯智能上下料機器人:自動化生產(chǎn)的得力助手
富唯智能的上下料機器人憑借其精準高效的操作、多功能應用的特點、智能調(diào)度的優(yōu)勢、安全穩(wěn)定的性能以及專業(yè)的服務支持,成為了眾多企業(yè)自動化生產(chǎn)線的得力助手。如果您正在尋找一款能夠提升生產(chǎn)效率、降低成本、優(yōu)化生產(chǎn)流程的

富唯智能復合機器人:CNC 自動上下料的變革利器
在制造業(yè)加速向智能化邁進的時代浪潮下,CNC 加工企業(yè)面臨著前所未有的挑戰(zhàn)與機遇。如何在激烈的市場競爭中脫穎而出,實現(xiàn)降本增效、提升產(chǎn)品質(zhì)量和生產(chǎn)效率,成為眾多企業(yè)亟待解決的關(guān)鍵問題。富唯智能復合機器人的出現(xiàn),為 CNC 自動上下
現(xiàn)代(Hyundai)機器人物聯(lián)網(wǎng)平臺可以實現(xiàn)什么功能
現(xiàn)代(Hyundai)機器人物聯(lián)網(wǎng)平臺一般可以實現(xiàn)以下功能: 設備接入與管理 多協(xié)議接入 :支持多種通信協(xié)議如 MQTT、CoAP、HTTPS 等,以及多種網(wǎng)絡類型包括 2G/3G/4G/5G
機器人如何實現(xiàn)移動功能
在前面兩篇《如何制造足球機器人》文章中,我們主要圍繞機器人本體進行了硬件設計,而這次將以控制器為中心,開展軟件設計工作。在正式開始之前,先為大家回顧一下機器人如何實現(xiàn)移動
激光焊接中振鏡的擺動原理
振鏡激光錫焊是非常高效的一種焊接方式,通過振鏡的擺動來對焊接的區(qū)域進行掃描、松盛光電來分享激光焊接中振鏡的擺動原理,來了解一下吧。

復合機器人在 CNC 上下料中的創(chuàng)新應
在現(xiàn)代制造業(yè)中,CNC 加工技術(shù)廣泛應用于各類精密零部件的生產(chǎn)。然而,傳統(tǒng)的 CNC 上下料方式多依賴人工操作或簡單的自動化設備,存在諸多局限性。隨著科技的不斷進步,復合機器人的出現(xiàn)為 CNC 上下料帶來了創(chuàng)新性的解決方案,它集
新技術(shù)解決方案 復合機器人 CNC 自動上下料
在追求高效、精準與自動化的現(xiàn)代制造業(yè)中,CNC加工技術(shù)的應用日益廣泛。然而,CNC機床的上下料過程往往成為制約生產(chǎn)效率的瓶頸。為了突破這一限制,富唯智能推出了復合機器人CNC自動上下料解決方案,重塑生產(chǎn)流程,提升生產(chǎn)效率與靈活性
復合機器人:CNC 行業(yè)上下料的高效變革者
在競爭激烈的 CNC 加工領(lǐng)域,提高生產(chǎn)效率、降低成本并確保加工精度是企業(yè)持續(xù)發(fā)展的關(guān)鍵。富唯智能復合機器人的出現(xiàn),為 CNC 行業(yè)的上下料環(huán)節(jié)帶來了創(chuàng)新性的解決方案,成為眾多企業(yè)實現(xiàn)智能化升級的核心驅(qū)動力。

機器視覺運動控制一體機在DELTA并聯(lián)機械手視覺上下料應用
機器視覺運動控制一體機在DELTA并聯(lián)機械手視覺上下料的應用

PLC遠程上下載網(wǎng)關(guān)的功能特點
上下載網(wǎng)關(guān)作為一種關(guān)鍵設備,其重要性日益凸顯。本文將詳細探討PLC遠程上下載網(wǎng)關(guān)的功能特點。 1. 遠程訪問與程序上下載 PLC遠程上下載網(wǎng)

機器視覺的應用流程是如何實現(xiàn)的
設計,明確應用目標、功能需求和性能指標。系統(tǒng)設計包括以下幾個方面: 1.1 應用場景分析:分析機器視覺系統(tǒng)需要解決的問題,確定應用場景和環(huán)境條件。 1.2 功能需求分析:根據(jù)應用場景,確定機器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論