") 基于CW32的MAX4466放大器模塊設(shè)計(jì)
基于CW32的MAX4466放大器模塊設(shè)計(jì)

一、簡(jiǎn)介
1.MAX4466是一款低噪聲、高增益的放大器模塊。該模塊采用了集成放大器芯片,能夠在低電壓下提供高增益。它的輸入阻抗較高,能夠與多種信號(hào)源(例如麥克風(fēng)、傳感器)實(shí)現(xiàn)良好的匹配。同時(shí),MAX4466還具備很低的噪聲水平,能夠有效地提取和放大微弱的信號(hào),提高系統(tǒng)的靈敏度。MAX4466模塊的應(yīng)用場(chǎng)景包括但不限于以下幾個(gè)方面:
音頻處理:可以作為音頻信號(hào)的前置放大器,將低電平的音頻信號(hào)放大到適合后續(xù)處理的水平,如音樂(lè)播放、語(yǔ)音識(shí)別、語(yǔ)音通信等。
聲音檢測(cè)與分析:結(jié)合麥克風(fēng)等音頻傳感器,可以實(shí)現(xiàn)聲音的檢測(cè)、分析和識(shí)別,如聲音傳感器、語(yǔ)音識(shí)別設(shè)備等。
無(wú)線通信:可以用于接收無(wú)線通信模塊的輸入信號(hào),對(duì)其進(jìn)行放大,以提高通信距離和信號(hào)質(zhì)量。
二、所需物料
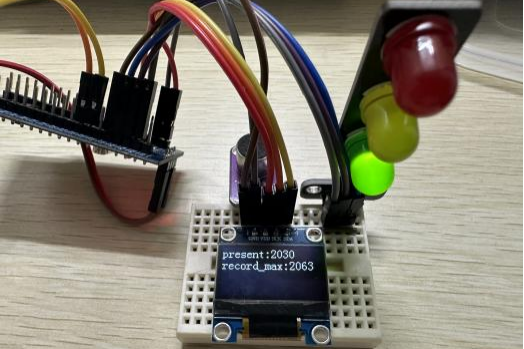
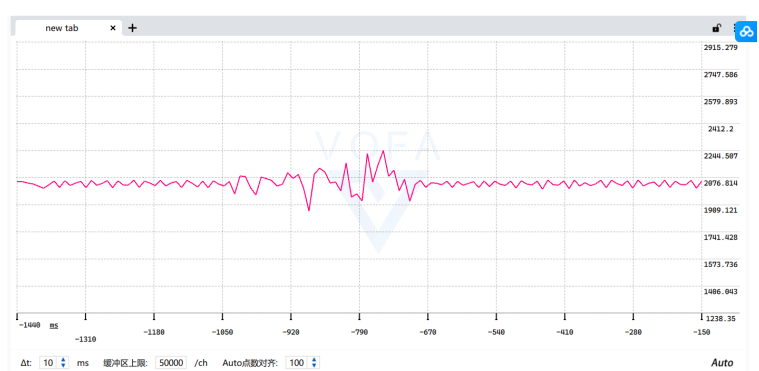
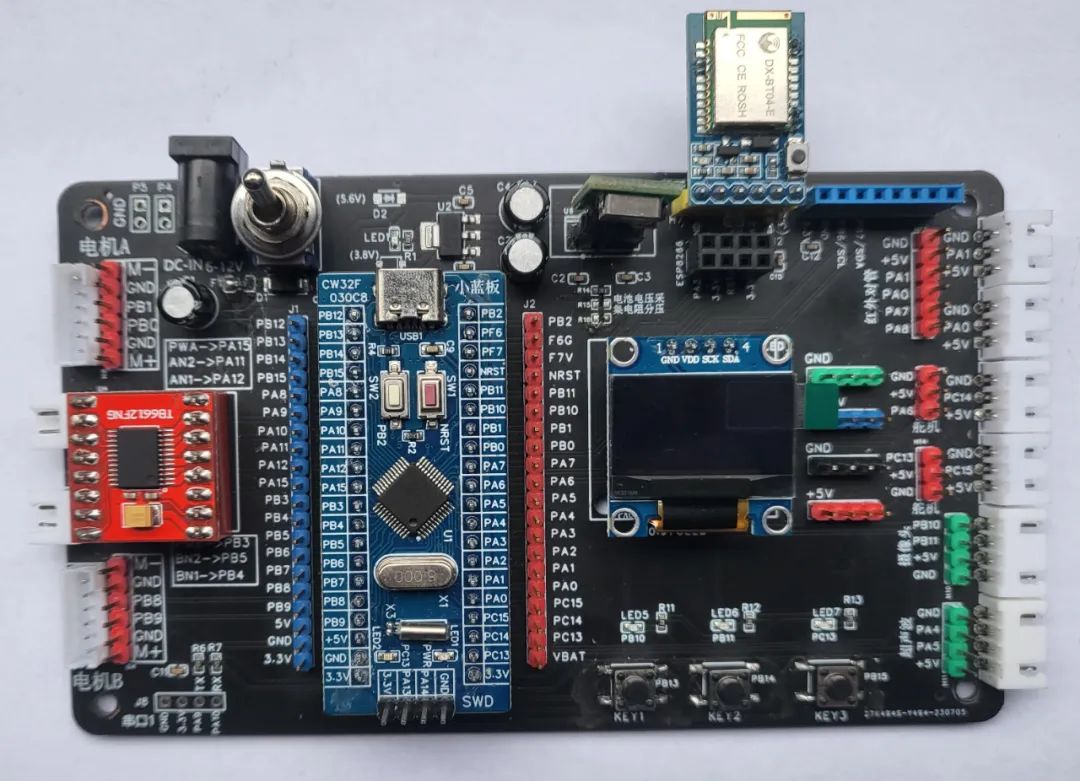
.本實(shí)驗(yàn)使用到了CW32f030c8小藍(lán)板、MAX4466模塊、LED交通信號(hào)燈模塊、0.96寸OLED顯示屏、Keil5開(kāi)發(fā)環(huán)境及VOFA+上位機(jī)軟件。
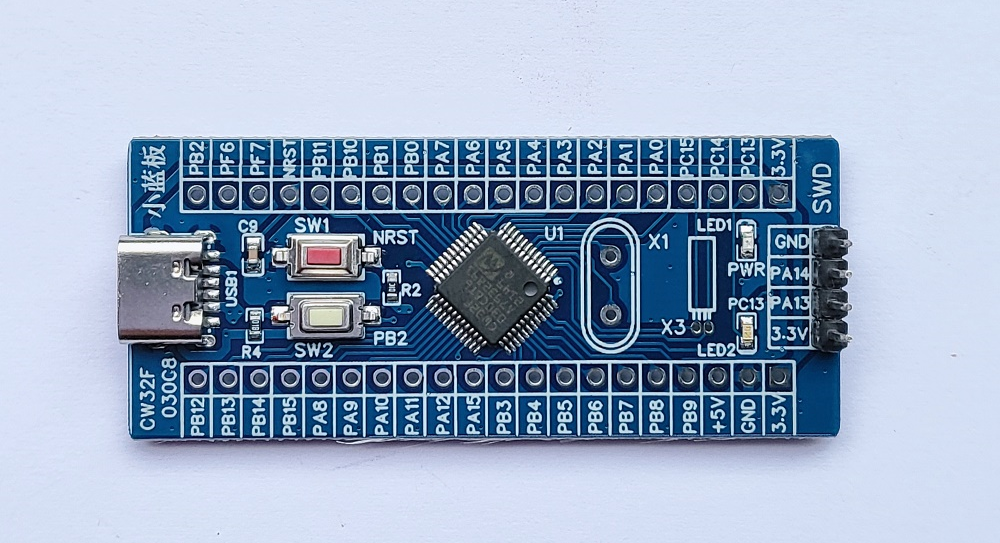 CW32F030C8小藍(lán)板 |
 MAX4466模塊 |
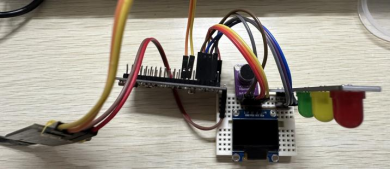 實(shí)物(俯視) |
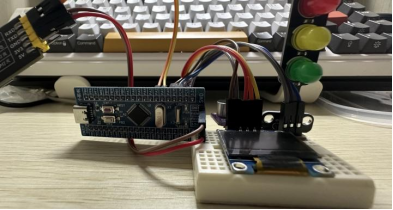 實(shí)物(正視) |
【單片機(jī)與MAX4466連線】:3.3V---VCC
GND---GND
PA0---OUT
【單片機(jī)與OLED屏連線】: GND---GND
3.3V--VDD
PB8--SCK
PB9--SDA
【單片機(jī)與LED燈連線】: GND--GND
PC15--R
PC14--Y
PC13--G
三、核心代碼
ADC.c: #include "ADC.h" #include "main.h" #include "delay.h" void ADC_Configuration(void) { ADC_SingleChTypeDef ADC_SingleInitStruct; __RCC_ADC_CLK_ENABLE(); // ADC時(shí)鐘使能 __RCC_GPIOA_CLK_ENABLE(); //GPIOA使能 PA00_ANALOG_ENABLE(); ADC_SingleInitStruct.ADC_Chmux = ADC_ExInputCH0; //PA00 通道0 ADC_SingleInitStruct.ADC_InitStruct.ADC_AccEn = ADC_AccDisable; //轉(zhuǎn)換結(jié)果累加不使能 ADC_SingleInitStruct.ADC_InitStruct.ADC_Align = ADC_AlignRight; //ADC轉(zhuǎn)換結(jié)果右對(duì)齊 ADC_SingleInitStruct.ADC_InitStruct.ADC_ClkDiv = ADC_Clk_Div16; //PCLK ADC_SingleInitStruct.ADC_InitStruct.ADC_DMAEn = ADC_DmaDisable; //關(guān)閉DMA傳輸 ADC_SingleInitStruct.ADC_InitStruct.ADC_InBufEn = ADC_BufEnable; //開(kāi)啟跟隨器 ADC_SingleInitStruct.ADC_InitStruct.ADC_OpMode = ADC_SingleChOneMode;//單通道單次轉(zhuǎn)換模式 ADC_SingleInitStruct.ADC_InitStruct.ADC_SampleTime = ADC_SampTime10Clk; //10個(gè)ADC時(shí)鐘周期 ADC_SingleInitStruct.ADC_InitStruct.ADC_TsEn = ADC_TsDisable; //內(nèi)置溫度傳感器禁用 ADC_SingleInitStruct.ADC_InitStruct.ADC_VrefSel = ADC_Vref_VDDA; //VDDA參考電壓 ADC_SingleChOneModeCfg(&ADC_SingleInitStruct); //開(kāi)始轉(zhuǎn)換 ADC_Enable(); // 使能ADC ADC_SoftwareStartConvCmd(ENABLE); //轉(zhuǎn)換使能 } uint16_t Get_Data(void) //ADC數(shù)據(jù)采集 { unsigned int temp_dat_adc = 0; ADC_SoftwareStartConvCmd(ENABLE); //開(kāi)始轉(zhuǎn)換 while(ADC_GetITStatus(ADC_IT_EOC)) { ADC_ClearITPendingBit(ADC_IT_EOC); //清除標(biāo)志位 temp_dat_adc=ADC_GetConversionValue();//電壓采集 } return temp_dat_adc; } uint16_t Cal_Average_Data(void) { float dat; uint8_t i=0; for(i=0;i<50;i++) //連續(xù)采集50次ADC的值 { dat+=Get_Data(); //累加 Delay_ms(1); } return dat/50; //返回平均值 } main.c: int main() { uint16_t temp; LED_Init(); //LED燈初始化 OLED_Init(); //OELD屏初始化 UART_Init(); //串口初始化 ADC_Configuration(); //ADC配置 OLED_ShowString(1,1,"present:"); //提示字符串 OLED_ShowString(2,1,"record_max:"); while(1) { temp=Cal_Average_Data(); //獲取ADC數(shù)值累加后的平均值 printf("%d ",temp); //通過(guò)串口借助VOFA+軟件打印波形圖 LED_Indicator(temp); //LED燈指示 Delay_ms(100); } }
四、VOFA+軟件簡(jiǎn)易使用說(shuō)明
 |
 |
 |
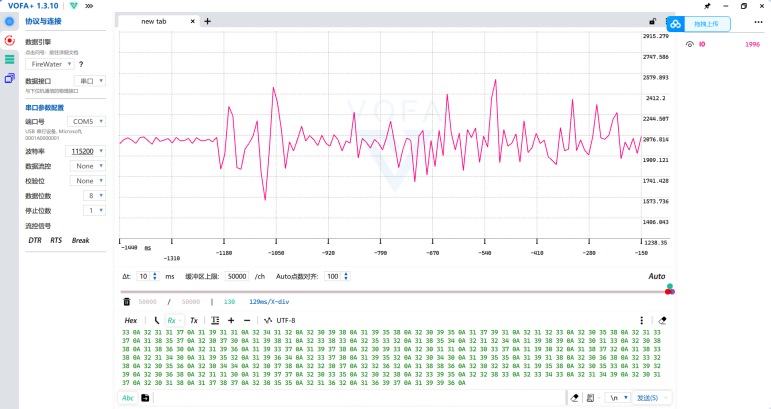
①配置協(xié)議與連接:數(shù)據(jù)引擎選擇”FireWater”,(注意:在程序中使用printf函數(shù)時(shí),必須在%d后面加上 才能在FireWater模式下被上位機(jī)正確識(shí)別),數(shù)據(jù)接口選擇”串口”,正確選擇端口號(hào)和配置波特率;
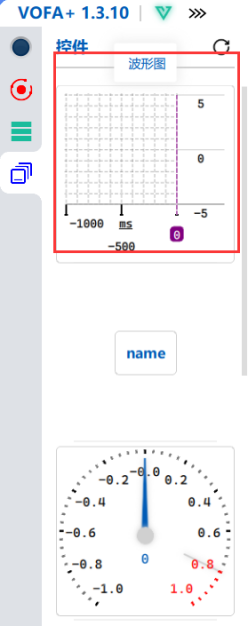
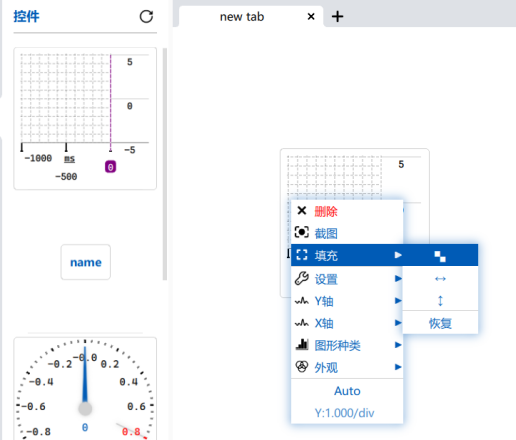
②在控件中找到波形圖,拖拽到主窗口中,選擇整窗口填充;
 |
 |
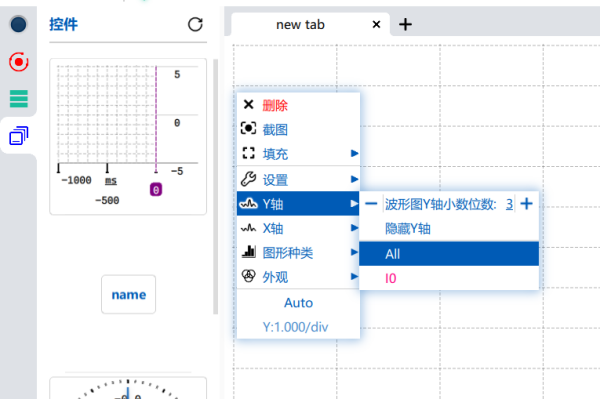
④右擊窗口選擇Y軸中的All打開(kāi)Y軸數(shù)據(jù)顯示;
⑤在圖形種類(lèi)中(默認(rèn))選擇波形圖;
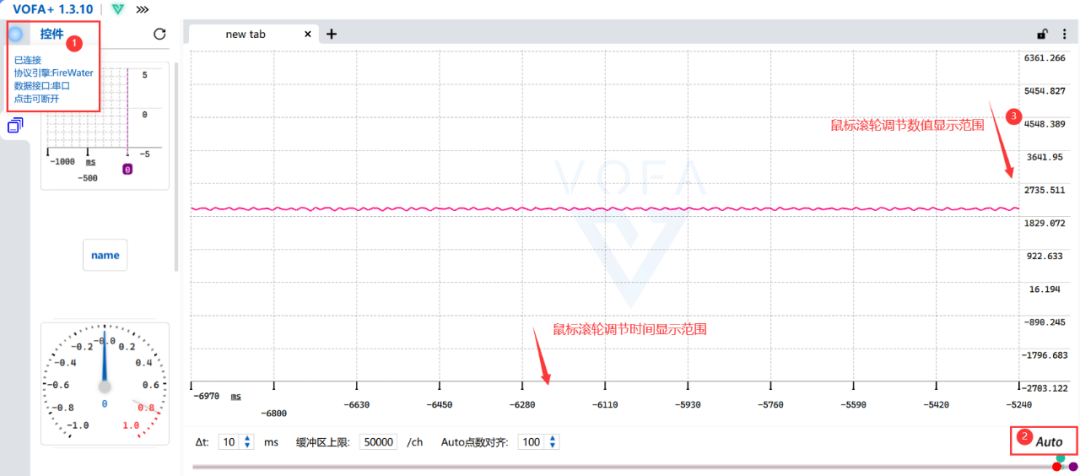
⑥點(diǎn)擊左上角灰黑色圓圈打開(kāi)串口進(jìn)行通信,看到圓圈變藍(lán)并且閃爍代表通信正常,之后可以像調(diào)節(jié)示波器顯示一樣通過(guò)鼠標(biāo)滾輪手動(dòng)將波形調(diào)整到合適的顯示范圍,也可以點(diǎn)擊Auto一鍵調(diào)整波形顯示范圍。
五、效果演示
 正常音量 |
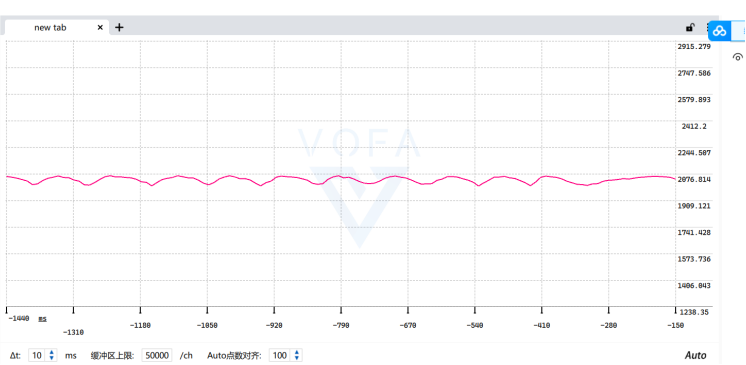 正常音量波形圖 |
 較大音量 |
 較大音量波形圖 |
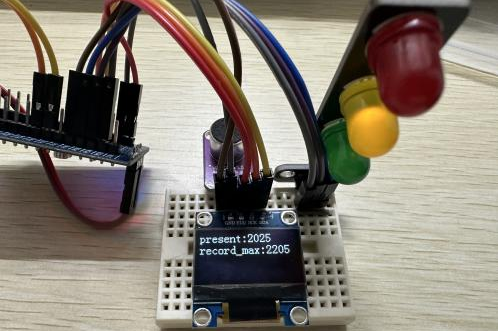
 過(guò)大音量 |
 過(guò)大音量波形圖 |
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2564文章
52792瀏覽量
765403 -
led
+關(guān)注
關(guān)注
242文章
23786瀏覽量
672457 -
放大器
+關(guān)注
關(guān)注
145文章
14124瀏覽量
216723 -
麥克風(fēng)
+關(guān)注
關(guān)注
15文章
659瀏覽量
55684 -
CW32
+關(guān)注
關(guān)注
1文章
243瀏覽量
1177
原文標(biāo)題:【CW32】基于CW32的MAX4466放大器模塊的應(yīng)用
文章出處:【微信號(hào):武漢芯源半導(dǎo)體,微信公眾號(hào):武漢芯源半導(dǎo)體】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
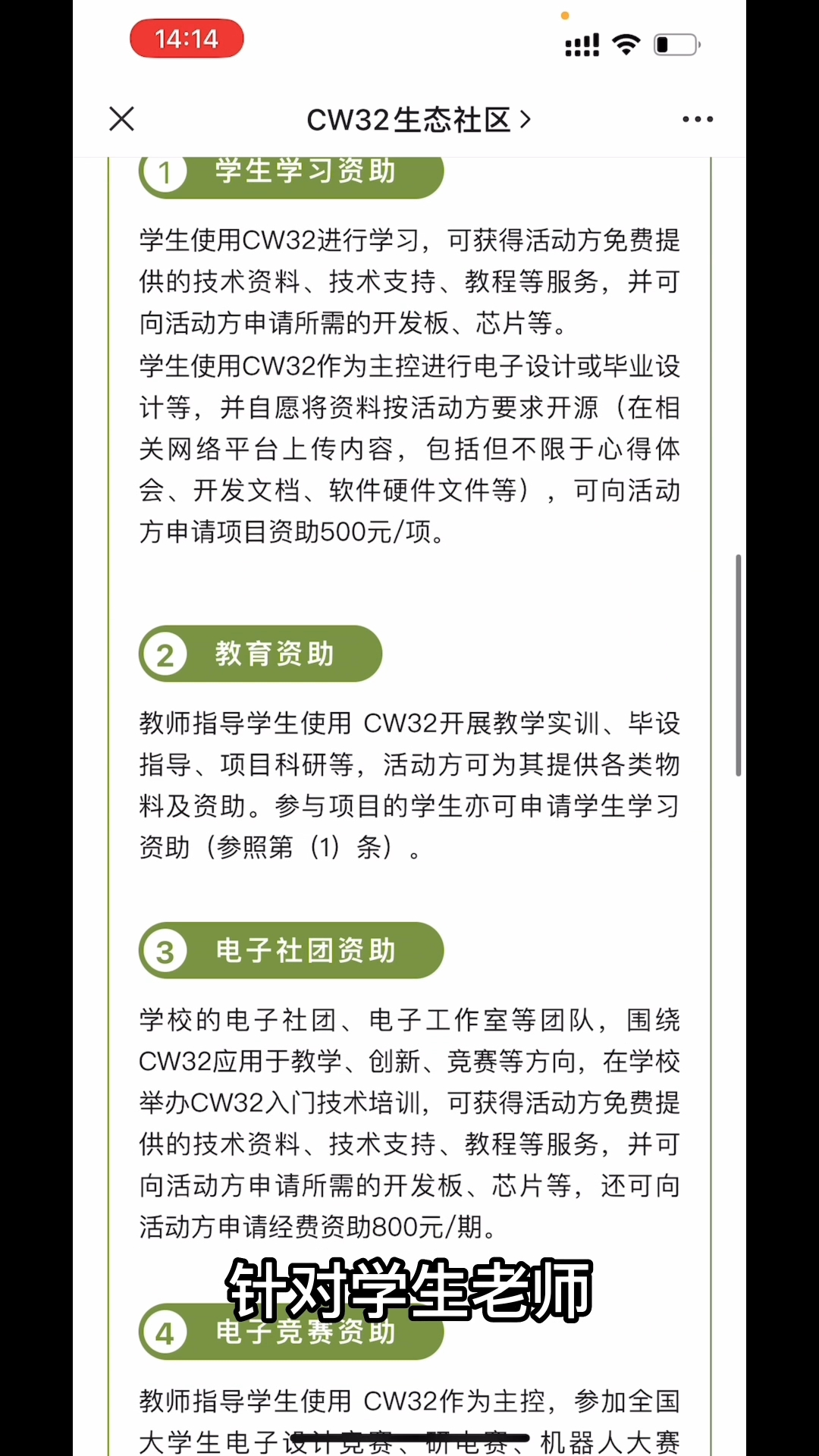
【CW32移植Free-RTOS】CW32開(kāi)發(fā)者扶持計(jì)劃
基于CW32的MAX4466(放大器)麥克風(fēng)模塊的應(yīng)用

MAX4466/MAX4468 pdf datasheet

MAX4466EXK+T - (Maxim Integrated) - 線性 - 放大器 - 音頻

MAX4466EXK-T - (Maxim Integrated) - 線性 - 放大器 - 音頻
MAX4466EUK+T - (Maxim Integrated) - 線性 - 放大器 - 音頻
cw32和stm32的區(qū)別
cw32和gd32的區(qū)別

基于CW32的遙控循跡小車(chē)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論