 機器視覺學習筆記:攝像機標定技術
機器視覺學習筆記:攝像機標定技術

攝像機標定的目的:三維重建
空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系是由攝像機成像的幾何模型決定的,這些幾何模型參數就是攝像機參數,為了得到這些參數而進行的實驗與計算的過程稱為攝像機標定。
在標定過程中通常要利用數學方法對從數字圖像中獲得的數據進行處理。通過這些數學處理,可以得到攝像機的內部和外部參數。
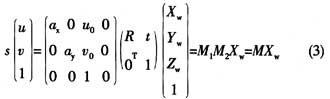
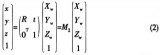
一、成像幾何模型
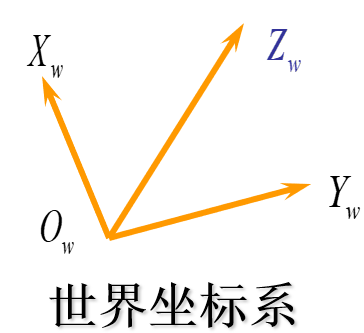
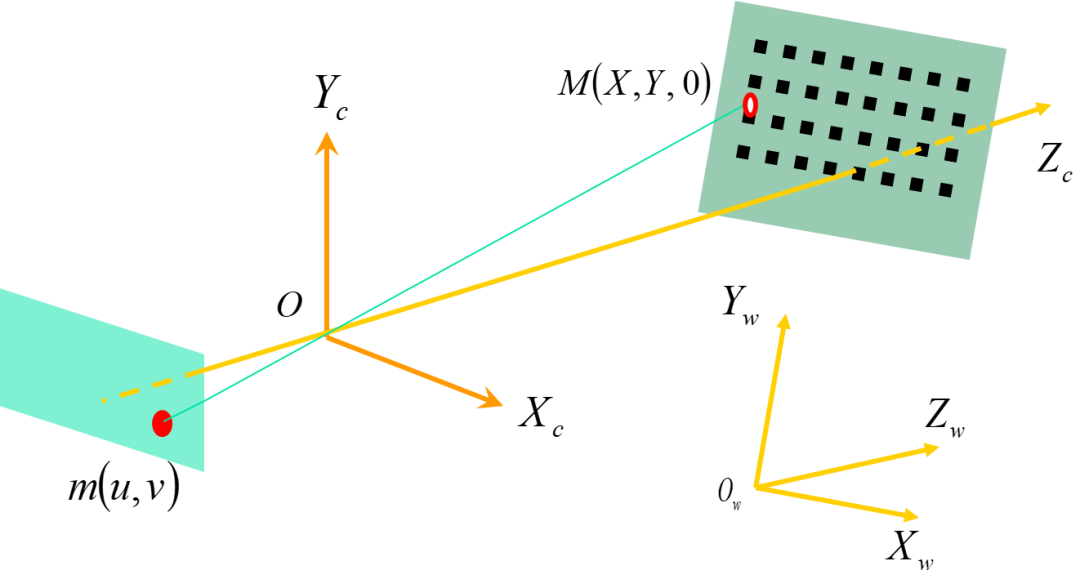
1.世界坐標系
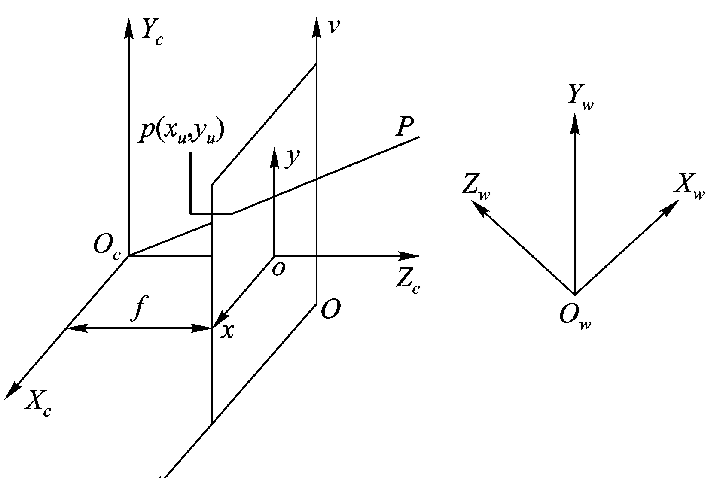
2.攝像機坐標系
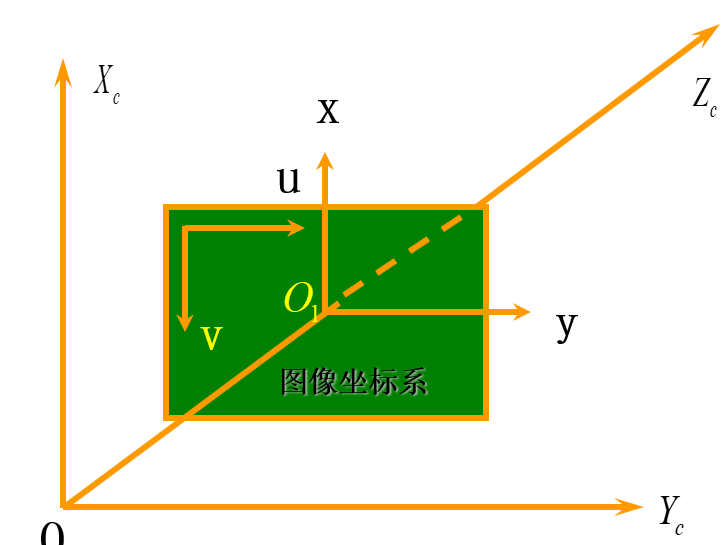
3.圖像坐標系
M1只與攝像機內部結構有關,稱為攝像機內部參數;M2只與攝像機相對于世界坐標系的方位有關,稱為攝像機外部參數;X為空間點在世界坐標系下的齊次坐標,M為矩陣,稱為透視變換矩陣。
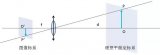
4.空間點與像點的非線性關系分析
由于攝像機的光學成像系統與理論模型之間的差異,二維圖像存在著不同程度的非線性變形,目標像點與理論成像點相比存在著多種類型的幾何畸變.
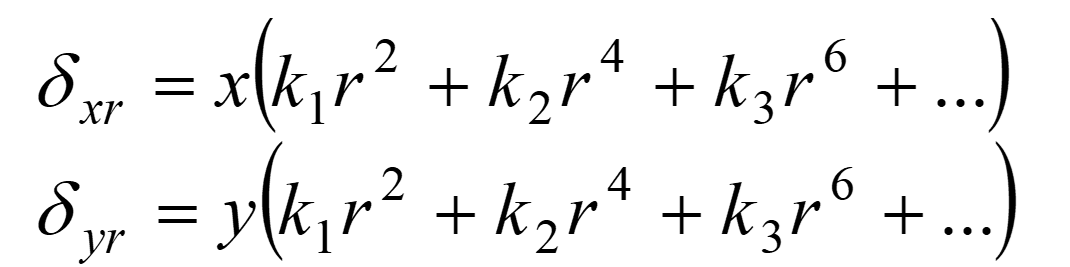
徑向畸變主要是由鏡頭形狀缺陷造成的,是關于攝像機鏡頭的主光軸對稱的。
正向畸變是枕形畸變,負向畸變是桶形畸變,其數學模型為:

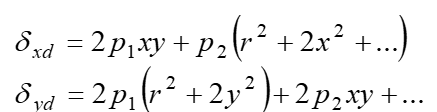
偏心畸變主要是由光學系統光心與幾何中心不一致造成的,即各透鏡的光軸中心不能嚴格共線。
這類畸變既含有徑向畸變,又含有切向畸變。
切向畸變的數學模型為:

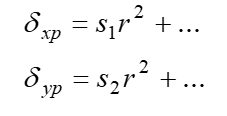
薄棱鏡畸變是由于鏡頭設計、制造缺陷或加工安裝誤差所造成的,如鏡頭與攝像機像面有很小的傾角等。
這類畸變相當于在光學系統中附加了一個薄棱鏡,不僅會引起徑向偏差,而且引起切向誤差。
其數學模型為:

二、典型標定方法
1.傳統攝像機標定方法
優點:可以使用于任意的攝像機模型,標定精度高。
不足:標定過程復雜,需要高精度的已知結構信息。在實際應用中很多情況下無法使用標定塊。
2.攝像機自標定方法
特點:僅依靠多幅圖像之間的對應關系進行標定。
優點:僅需要建立圖像之間的對應,靈活性強,潛在應用范圍廣。
不足:非線性標定,魯棒性不高。
3.傳統的攝像機標定方法
利用已知的景物結構信息。常用到標定塊。
?利用最優化算法的標定方法
?利用攝像機變換矩陣的標定方法
?兩步法
?雙平面標定法
基本原理:
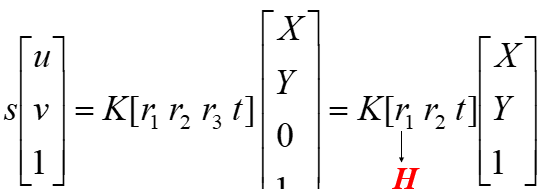
其中,K為攝像機的內參數矩陣。由于攝像機有5個未知內參數,所以當所攝取得的圖象數目大于等于3時,就可以線性唯一求解出K。
張正友方法所用的平面模板
4.攝像機自標定方法
利用本質矩陣和基本矩陣的攝像機標定方法;利用主動系統控制攝像機作特定運動的自標定方法(主動視覺標定方法)。
5.基于平面單應矩陣的正交運動方法原理
t(1)、t(2)為攝像機一組正交的平移運動,兩個單應矩陣:
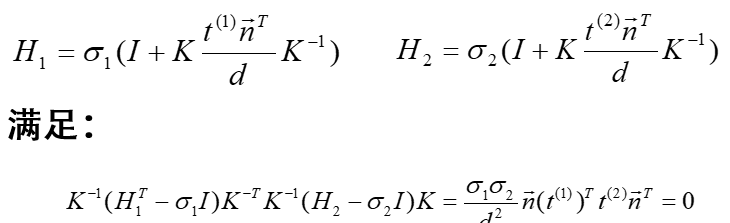
五組兩正交運動可完全求解5個內參數。
本文來源于CSDN博主liutangplease
審核編輯:湯梓紅
-
攝像機
+關注
關注
3文章
1697瀏覽量
61254 -
機器視覺
+關注
關注
163文章
4526瀏覽量
122694 -
坐標系
+關注
關注
0文章
29瀏覽量
7473 -
三維重建
+關注
關注
0文章
27瀏覽量
10069 -
幾何模型
+關注
關注
0文章
4瀏覽量
6176
原文標題:機器視覺(三):攝像機標定技術
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于Dragonboard 410c平臺的機器3D視覺—攝像機標定原理
【國外開源】STM32 機器人視覺攝像機OpenMV Cam設計(硬件+固件源碼等)

基于OpenCV的單目攝像機標定
機器視覺中的攝像機標定和自標定分析
攝像機標定技術及應用
常見的機器人視覺伺服中的標定技術有哪些

機器視覺中攝像機標定的目的是什么






 工商網監
工商網監
評論