") CAN總線位時(shí)序的介紹
CAN總線位時(shí)序的介紹

CAN控制器根據(jù)兩根線上的電位差來判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發(fā)送方通過使總線電平發(fā)生變化,將消息發(fā)送給接收方。
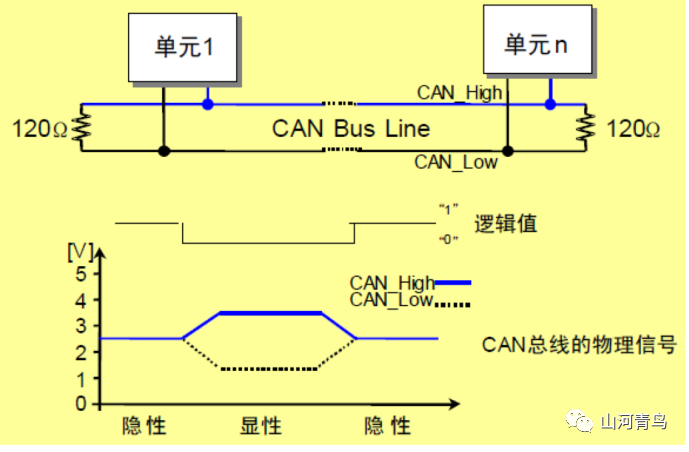

顯性電平對(duì)應(yīng)邏輯 0,CAN_H 和 CAN_L 之差為 2.5V 左右。而隱性電平對(duì)應(yīng)邏輯 1,CAN_H 和 CAN_L 之差為0V。隱形電平具有包容的意味,只有所有的單元都輸出隱性電平,總線上才為隱性電平(顯性電平比隱性電平更強(qiáng))。
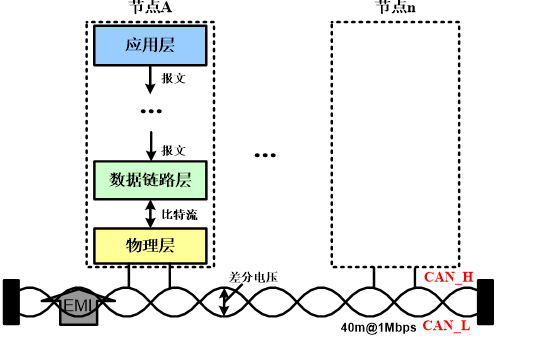
CAN總線是采用NRZ(Non-Return to Zero)方法進(jìn)行通訊的,這種通信有一種不好的地方,就是各個(gè)位的開頭或者結(jié)尾都沒有附加同步信號(hào)。CAN總線在長距離運(yùn)輸中,由于發(fā)送單元和接收單元存在的時(shí)鐘頻率誤差及傳輸路徑上的相位延遲等,都會(huì)引起同步偏差。
這就導(dǎo)致信息傳輸不穩(wěn)定,信號(hào)質(zhì)量有問題。所以發(fā)送單元和接受單元都采用了一些通訊同步的方法來使二者電平傳輸能達(dá)到同步。
同步有兩種方式,一種是硬件同步,一種是再同步。在解釋同步之前,先介紹下位時(shí)序。
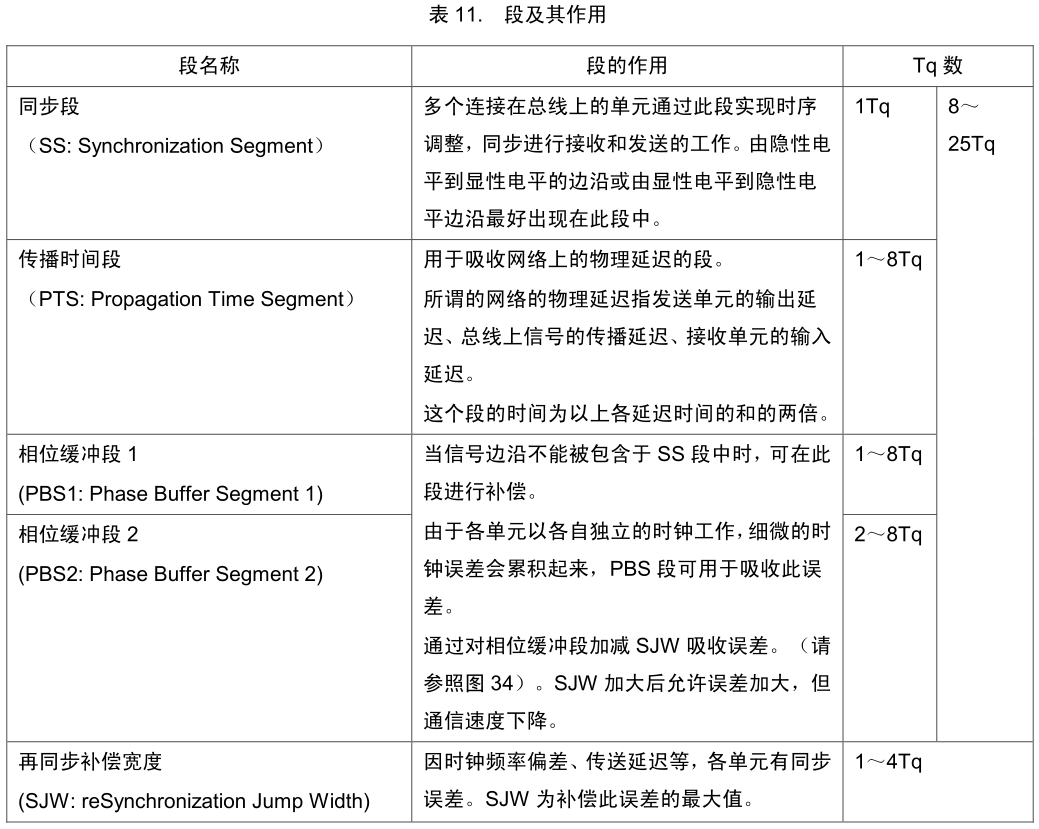
位時(shí)序--由發(fā)送單元在非同步的情況下發(fā)送的每秒鐘的位數(shù)稱為位速率。一個(gè)位可分為 4 段。
? 同步段(SS)
? 傳播時(shí)間段(PTS)
? 相位緩沖段 1(PBS1)
? 相位緩沖段 2(PBS2)
這些段又由可稱為 Time Quantum(以下稱為 Tq)的最小時(shí)間單位構(gòu)成。
1 位分為 4 個(gè)段,每個(gè)段又由若干個(gè) Tq 構(gòu)成,這稱為位時(shí)序。
1 位由多少個(gè) Tq 構(gòu)成、每個(gè)段又由多少個(gè) Tq 構(gòu)成等,可以任意設(shè)定位時(shí)序。通過設(shè)定位時(shí)序,多個(gè)單元可同時(shí)采樣,也可任意設(shè)定采樣點(diǎn)。各段的作用和Tq 數(shù)如下圖:

一個(gè)位的構(gòu)成如下:

-
CAN
+關(guān)注
關(guān)注
57文章
2901瀏覽量
467124 -
總線
+關(guān)注
關(guān)注
10文章
2958瀏覽量
89496 -
時(shí)序
+關(guān)注
關(guān)注
5文章
397瀏覽量
37846
發(fā)布評(píng)論請(qǐng)先 登錄

can總線位時(shí)序是什么
CAN通信控制的位時(shí)序邏輯--Bit Timing Logic具體實(shí)現(xiàn)
STM32的CAN外設(shè)位時(shí)序
探討一下CAN總線的位時(shí)序與參數(shù)設(shè)置
CAN總線仲裁示意圖_CAN總線位仲裁技術(shù)及優(yōu)缺點(diǎn)
CAN總線基礎(chǔ)的詳細(xì)資料概述
CANOpen系列教程04 _CAN總線波特率、位時(shí)序、幀類型及格式說明
CAN總線錯(cuò)誤的類型介紹
虹科干貨 | 帶你全面認(rèn)識(shí)“CAN總線錯(cuò)誤”(二)——CAN錯(cuò)誤類型

虹科干貨 | 帶你全面認(rèn)識(shí)“CAN總線錯(cuò)誤”(二)——CAN錯(cuò)誤類型
高速CAN速率 CAN總線位的4段
CAN位時(shí)序參數(shù)計(jì)算器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論