") PID參數(shù)整定試湊法介紹
PID參數(shù)整定試湊法介紹

PID 參數(shù)整定方法
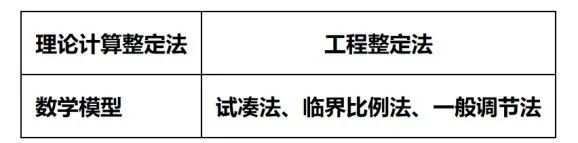
理論計(jì)算整定法:依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定 PID 參數(shù)。
這種方法是建立在理想化條件下的,其得到的參數(shù)不一定能夠直接使用,還需要結(jié)合經(jīng)驗(yàn)以及實(shí)際的系統(tǒng)進(jìn)行調(diào)整。
工程整定法:依靠工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行整定,此方法易于掌握,在實(shí)際調(diào)參中被廣泛采用。工程整定法包括:試湊法、臨界比例法和一般調(diào)節(jié)法。
注意:無論采用哪一種方法所得到的 PID 參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善,因此,在 PID 參數(shù)整定中,最重要的就是經(jīng)驗(yàn)的積累。
① 比例系數(shù):調(diào)節(jié)作用快,系統(tǒng)一出現(xiàn)偏差,調(diào)節(jié)器立即將偏差放大輸出
②積分系數(shù):積分系數(shù)的調(diào)節(jié)會(huì)改變輸入偏差對(duì)于系統(tǒng)輸出的影響程度。積分系數(shù)越大,消除靜差的時(shí)間越短,但是過大的積分系數(shù)則會(huì)導(dǎo)致系統(tǒng)出現(xiàn)超調(diào)現(xiàn)象,這在具有慣性的系統(tǒng)中尤為明顯。
③微分系數(shù):微分系數(shù)的調(diào)節(jié)是偏差變化量對(duì)于系統(tǒng)輸出的影響程度。微分系數(shù)越大,系統(tǒng)對(duì)于偏差量的變化越敏感,越能提前響應(yīng),進(jìn)而抑制超調(diào),但是過大的微分系數(shù)則會(huì)讓整個(gè)系統(tǒng)出現(xiàn)振蕩。
試湊法
內(nèi)容:
結(jié)合系統(tǒng)的具體情況以及經(jīng)驗(yàn),先試湊幾組合理的 PID
系數(shù),同時(shí)需要觀察系統(tǒng)的曲線變化,確定每一個(gè)系數(shù)對(duì)于整個(gè)系統(tǒng)曲線的大致影響,然后再根據(jù)具體的曲線進(jìn)行調(diào)整。
調(diào)節(jié)思路
① 先是比例(P),再積分(I),最后是微分(D)
② 按純比例系統(tǒng)整定比例系數(shù),使其得到比較理想的調(diào)節(jié)過程曲線,然后再把比例系數(shù)縮小 1.2
倍左右,將積分系數(shù)從小到大改變,使其得到較好的調(diào)節(jié)過程曲線
③ 在這個(gè)積分系數(shù)下重新改變比例系數(shù),再看調(diào)節(jié)過程曲線有無改善
④ 如果有改善,可將原整定的比例系數(shù)減少,改變積分系數(shù),這樣多次的反復(fù),就可得到合適的比例系數(shù)和積分系數(shù)
⑤ 如果存在外界的干擾,系統(tǒng)的穩(wěn)定性不好,可把比例、積分系數(shù)適當(dāng)減小,使系統(tǒng)足夠穩(wěn)定
⑥ 如果系統(tǒng)存在小幅度超調(diào),可以將整定好的比例系數(shù)和積分系數(shù)適當(dāng)減小,增大微分系數(shù),以得到超調(diào)量最小、調(diào)節(jié)作用時(shí)間最短的系統(tǒng)曲線
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6774瀏覽量
111996 -
PID
+關(guān)注
關(guān)注
37文章
1481瀏覽量
87781 -
調(diào)節(jié)器
+關(guān)注
關(guān)注
5文章
877瀏覽量
47595
發(fā)布評(píng)論請(qǐng)先 登錄
電機(jī)控制中PID整定的問題
最經(jīng)典的PID參數(shù)整定口訣
經(jīng)驗(yàn)法整定PID參數(shù)的實(shí)用口訣
關(guān)于PID整定
基于衰減頻率特性的PID參數(shù)優(yōu)化整定研究
關(guān)于湊試法來確定PID的參數(shù)
增量式pid分析及參數(shù)整定

PID控制參數(shù)的原理和整定的的計(jì)算方法整定PID參數(shù)的方法和概述





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論