 1030 nm單光子探測激光雷達技術研究
1030 nm單光子探測激光雷達技術研究

1 μm波段單光子探測激光雷達因大氣透過率高、背景噪聲低、紅外隱蔽性好、激光脈沖能量高,在遠距離激光測距和成像方向極具發展前景。然而,傳統的1064 nm激光器缺少對應的高性能的單光子探測器,成為1 μm波段單光子探測激光雷達的發展瓶頸。蓋革Si APD單光子探測器(SiSPAD)具有優異的探測性能,但是其在1064 nm波長的探測效率極低。
據麥姆斯咨詢報道,近期,華東師范大學精密光譜科學與技術國家重點實驗室的科研團隊在《激光與紅外》期刊上發表了以“1030 nm單光子探測激光雷達技術”為主題的文章。該文章第一作者為楊函霖,主要從事近紅外單光子測距與成像技術方面的研究工作;通訊作者為吳光研究員,主要從事低噪聲高速單光子探測技術方面的研究工作。
針對這個激光器與探測器的矛盾,本文研究1030 nm波長單光子探測激光雷達技術,SiSPAD在1030 nm的探測效率是1064 nm的2.9倍,相同條件的單光子探測激光雷達探測距離提升67.8%。另外,本文搭建雙棱鏡光束掃描裝置,演示了1030 nm波長的單光子三維成像。
SiSPAD在1 μm波段探測效率
SPAD的探測概率由量子效率和光生載流子觸發雪崩電流概率組成。量子效率指入射光子被APD吸收層的半導體材料吸收后產生光生載流子的概率,其中最主要的吸收形式為本征吸收。半導體材料對不同波長入射光子的本征吸收強度不同,導致SPAD的探測效率存在差異。在1 μm波段,Si的本征吸收強度隨波長增大而降低。本文首先測量SiSPAD在1 μm波段的探測效率,從而分析比較1030 nm與1064 nm兩種波長單光子探測激光雷達的性能差異。
本文采用德國Laser Components公司的Si APD器件(Sap500),發展主動抑制電路,研制成SiSPAD,所測探測效率與其他同類產品存在絕對數值上的差異,但探測效率隨波長的變化趨勢是一致的。在暗室中對SiSPAD探測效率標定結果如圖1所示。從標定結果可見,SiSPAD在1 μm附近的探測效率隨波長增長而快速下降,其在1064 nm波長的探測效率僅1.1%,而在1030 nm波長的探測效率達到3.2%,兩者存在約2.9倍差異。
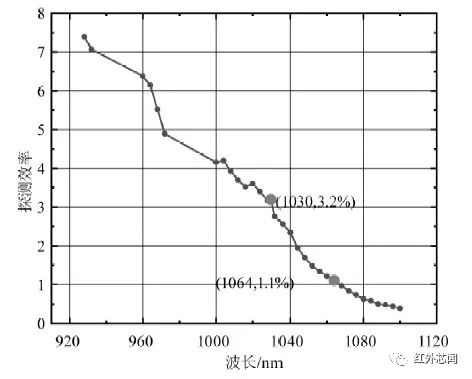
圖1 SiSPAD探測效率標定結果
使用雷達方程來計算探測效率差距對測距能力的影響。1030 nm激光雷達的探測距離比1064 nm激光雷達高出約67.8%,更高的探測距離意味著更大的應用潛力。另一方面,激光光源的性能也與探測距離密切相關。現主流的1064 nm單光子探測激光雷達多使用Nd:YAG激光器作為光源,該激光器技術成熟且應用廣泛。相比之下,雖然使用Yb:YAG晶體的1030 nm激光器相關研究較少,但該晶體擁有量子效率高、能級結構簡單、無激發態吸收和上轉換作用、無濃度猝滅現象,高吸收帶寬等獨特優勢。已經有許多高性能的1030 nm激光器產品相繼推出,解決了1030 nm單光子探測激光雷達的光源問題。雖然1064 nm激光器輸出功率高于1030 nm激光器,但對于汽車自動駕駛、地形測繪等需要符合人眼安全條件的應用領域,現有1030 nm激光器已滿足功率要求。
單光子探測激光雷達實驗設計
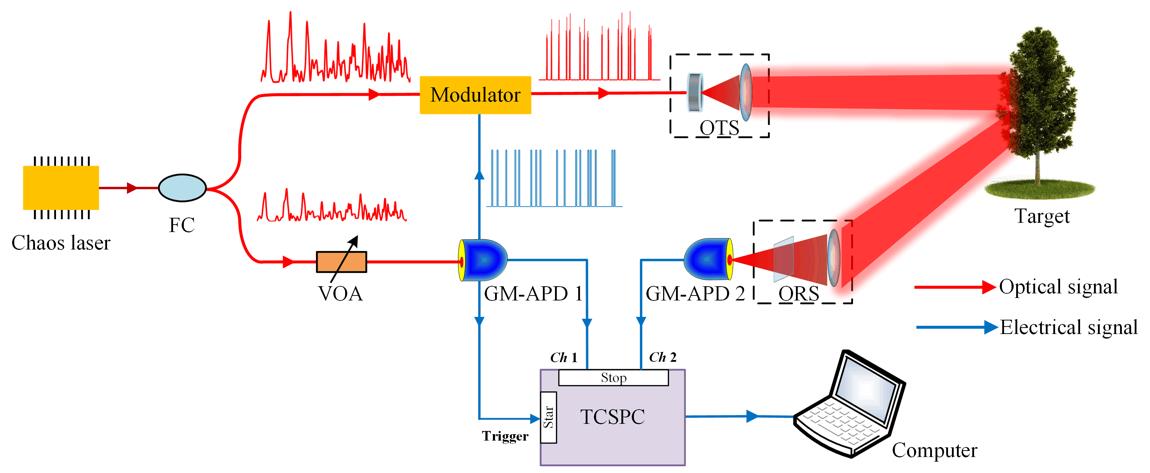
圖2為單光子探測激光雷達系統示意圖。實驗中使用的1030 nm固態激光器輸出脈寬為1.5 ns、重復頻率為1.5 kHz,輸出光束的直徑為1.1 mm、發散角為1.2 mrad、單脈沖能量最大可調至100 μJ。1064 nm激光器的輸出脈寬為2.2 ns、重復頻率為1 kHz、光束的直徑為1 mm,發散角為3.5 mrad,單脈沖能量0.5 μJ。兩波長激光器可以拆卸替換,便于開展兩個波長的單光子測距對比實驗。出射光束經過組合濾光片衰減后,由有機玻璃板進行分光(分光比為3.7:96.2),其中反射光束進入PIN光電二極管產生同步信號,透射光束穿過50 mm直徑的打孔反射鏡(打孔孔徑10 mm)后出射。掃描裝置采用雙棱鏡設計,由一對直徑25.4 mm、頂角18.2°的楔形棱鏡組成,并使用兩個金屬傳感器反饋棱鏡的旋轉角度。1030 nm窄帶濾光片用于抑制背景噪聲。同步信號、金屬傳感器兩路方位角信號、SPAD總共4路信號輸入到TCSPC系統中記錄。
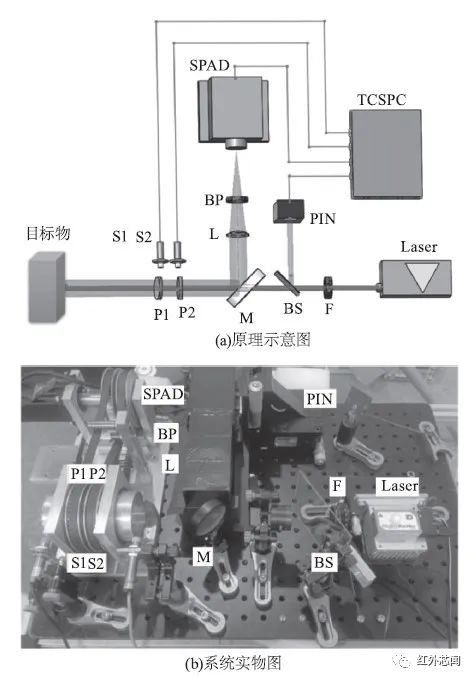
圖2 單光子探測激光雷達系統
1030 nm / 1064 nm單光子測距對比
本文分別開展1030 nm和1064 nm波長的單光子測距實驗,以驗證兩個波長探測效率差異對單光子測距能力的影響。按照圖2原理圖搭建單光子探測激光雷達,固定雙棱鏡的方位角使激光光束方向恒定,并通過改變濾光片調節脈沖強度,將兩個光源調整到單脈沖能量基本一致。同時確保探測器計數保持在平均每脈沖0.1個光子以下,以規避多光子計數的影響。經過測試,光路中打孔反射鏡、耦合透鏡等其他光學原件在兩波長處的光學損耗差異可以忽略不計。每個波長均測試5次,單次累計時間t=20 s,測距目標為實驗室走廊后面60 m遠的白色墻壁,圖3展示了其中兩次測量的結果。
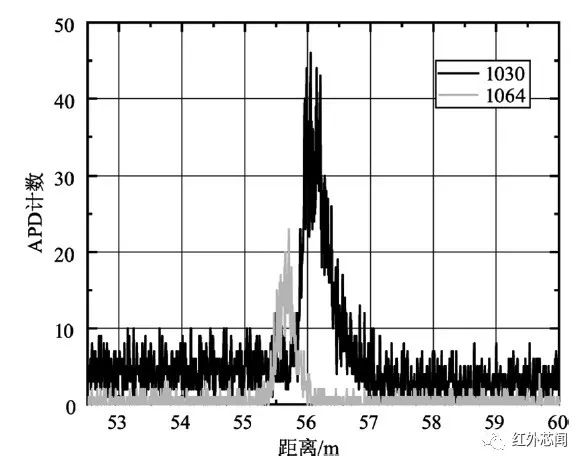
圖3 1030 nm / 1064 nm測距結果
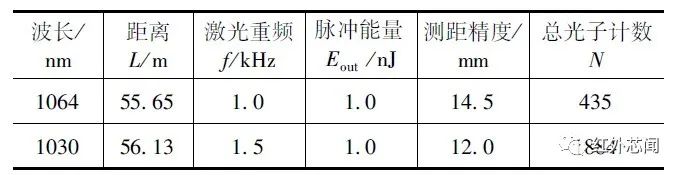
圖3中1030 nm測距得到的信號峰在高度上明顯超過1064 nm。因為1030 nm激光器功率比1064 nm激光器更大,其初始出射光束被濾光片反射回來并散射到周圍后會對探測器產生干擾,所以兩波長的噪聲強度存在差異。本文在后續分析中先做了去底噪處理。兩個波長測距時雷達系統的位置有一些變動,導致測距結果不一致。該差異在后續計算中已經代入,不影響驗證比對。使用Matlab對兩個波長的測距結果進行積分,得到信號峰內回波信號的總和,結果如表1所示。
表1 相關參數和測距結果
單光子三維成像實驗
掃描裝置的性能高低是影響雷達光束在空間上指向精確與否的關鍵性因素。聲光、電光偏轉器等非機械性的掃描裝置會引發光電效應等現象,因此存在通光孔徑偏小和光束傳輸質量較差等問題。機械性掃描裝置包括以旋轉電機為代表的云臺法、以振鏡為代表的反射法和以楔形棱鏡為代表的折射法。其中云臺法大都體積笨重,無法高精度且快速的掃描;反射法因鏡子角度改變量與光束偏轉角度為2倍關系,在機械誤差上更為敏感,面對機械震動等外界因素時抗干擾能力不足。與上述方法相比,雙棱鏡結構更為緊密、響應速度快、抗干擾能力更強,在復雜環境的適用性上也更好。
組成掃描裝置的一對楔形棱鏡安置在金屬套筒中。套筒上安裝有傳動輪,通過傳動帶與步進電機相連,最高轉速10 r/s。步進電機上安裝了兩個不同齒數的傳動輪用于帶動雙棱鏡旋轉,其驅動信號由高精度信號發生器給出,雙棱鏡的方位角信息由棱鏡套筒旁的兩個金屬傳感器給出。雙棱鏡的轉動速度由電機轉速和各自傳動輪齒數比共同決定,通過更換傳動輪即可改變掃描軌跡。實驗中的齒數比為50:47,掃描軌跡如圖4(b)所示。
為進一步減少背景噪聲,本文在打孔反射鏡到單光子探測器的光路上用吸光材料做了遮蔽處理。配合帶寬10 nm的窄帶濾光片,背景噪聲最終被控制在10 kHz以內。
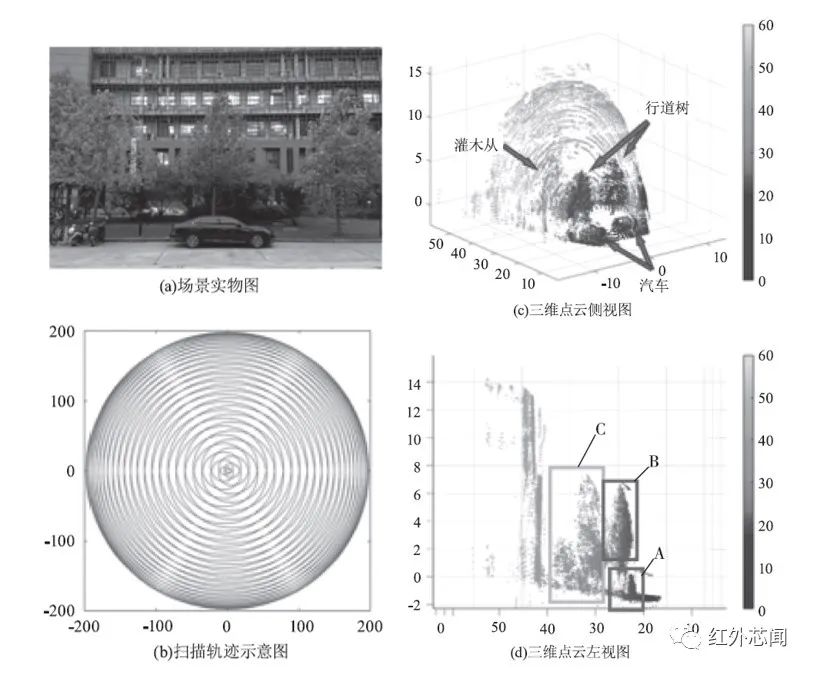
圖4 單光子成像點云圖
為演示1030 nm單光子探測激光雷達的成像效果,本文在實驗室周圍選取了一個合適的場景。如圖4(a)所示,整體場景可分為3層:距離最近的兩輛汽車和兩顆行道樹、靠中間的灌木叢、以及最外層的辦公樓外墻。掃描范圍為一個頂角36°的圓錐,從系統到辦公樓外墻的距離約50 m,最大掃描半徑16 m。本文將連續掃描的軌跡平均劃分為若干個像素點,用TCSPC技術處理單個像素點對應時間段內的所有回波信號。在多個脈沖周期累計后,背景噪聲接近平均的分布在時間軸上,而與同步信號相關性強的目標信號集中累積在一處,形成計數值遠超噪聲的信號峰。設定一個比較閾值去噪后對該信號峰提取質心對應的時間T,即可求出該像素點的距離D=cT/2。
盡管在白天使用1030 nm單光子探測激光雷達也能獲得目標場景的距離信息,但過高的背景計數會導致系統信噪比過低、運算處理時間過長,所以本章實驗在夜間進行。設置掃描時間250 s,電機轉速為0.2 r/s,雙楔形棱鏡分別轉動50圈和47圈。每個像素點的累計時間為6.6 ms,掃描軌跡被劃分為約38000個像素點。掃描結果如圖4(c)、(d)所示。
圖中目標場景的重建效果良好。距離約25 m的藍色點云中,靠上部分為兩顆行道樹,靠下部分為兩輛汽車,在圖4(d)中分別“A”框和“B”框標出。第二層灌木叢距離約35 m,用淺藍灰色點云顯示,在圖4(d)中用“C”框標出。最后的辦公樓外墻距離約50 m,用橙色點云顯示其3層結構。汽車和樹木的總體輪廓清晰,而辦公樓外墻在細節上效果一般。這是因為汽車和樹木的表面反射率較高,而辦公樓外側有大量低漫反射率的玻璃窗,導致回波光子數量有差異。同時在雙楔形棱鏡掃描軌跡劃分的像素點中,中心區域的像素點較為密集,而邊際區域的像素點分布稀疏,進而造成了外墻部分成像模糊。
結論
本文搭建了一套基于SiSPAD的1030 nm單光子探測激光雷達,采用雙棱鏡作為掃描裝置。從SiSPAD探測效率標定數據的分析和1064 nm / 1030 nm兩個波長測距比較實驗這兩個方面驗證,說明1030 nm單光子探測激光雷達能夠獲得67.8%左右的探測距離提升。另外,本文還演示了50 m范圍的近距離三維成像,證明了1030 nm單光子探測激光雷達的可行性。同時,目前已經研發出高性能的1030 nm激光器貨架產品,解決了激光光源的問題。相較于傳統的近紅外激光雷達,這種1030 nm單光子探測激光雷達在未來汽車自動駕駛、地形測繪等方面有很大的應用潛力。
審核編輯:劉清
-
激光器
+關注
關注
17文章
2701瀏覽量
62182 -
單脈沖
+關注
關注
0文章
28瀏覽量
12875 -
激光雷達
+關注
關注
971文章
4214瀏覽量
192316 -
光電二極管
+關注
關注
10文章
416瀏覽量
36593 -
單光子探測器
+關注
關注
1文章
32瀏覽量
4613
原文標題:1030 nm單光子探測激光雷達技術
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
激光雷達(LiDAR)技術方案與工作原理全解析

自動駕駛激光雷達:原理、類型與應用梳理

激光雷達技術在自動駕駛汽車中的應用

鐳神智能無人機探測激光雷達產品矩陣:構筑低空安防的智慧天眼

DeepSeek:2025年激光雷達技術與行業應用趨勢


使用單光子探測技術設計的數字混沌激光雷達系統

單光子激光雷達:航空遙感技術的革命性突破

激光雷達技術的發展趨勢
中科院微電子所在光子集成激光探感技術方面取得進展
LIDAR激光雷達逆向建模能用到revit當中嗎
光學雷達和激光雷達的區別是什么
基于SPAD單光子相機的LiDAR技術革新

一文看懂激光雷達






 工商網監
工商網監
評論