") 從4D到4D數(shù)字成像,雷達數(shù)字化升級助力實現(xiàn)更好的智能駕駛
從4D到4D數(shù)字成像,雷達數(shù)字化升級助力實現(xiàn)更好的智能駕駛

電子發(fā)燒友網(wǎng)報道(文/吳子鵬)近一段時間,智能汽車在傳感器方面的熱點從激光雷達逐步轉(zhuǎn)移到了4D成像雷達。傳統(tǒng)3D毫米波雷達只能檢測物體的距離、相對徑向速度、水平角度信息,4D雷達則加入了高度信息,并通過類似點云的方式提升了距離分辨率、角度分辨率、速度分辨率等關(guān)鍵信息,因此能夠讓智能駕駛邁上更高的臺階。
根據(jù)信號調(diào)制方式的不同,4D雷達分為模擬雷達和數(shù)字成像雷達。其中,前者采用基于模擬調(diào)制的調(diào)頻連續(xù)波(FMCW)方案,后者則采用數(shù)字編碼調(diào)制(DCM)方案。
作為一家專注于設(shè)計4D數(shù)字成像雷達解決方案的創(chuàng)新型高科技公司,Uhnder在4D數(shù)字成像雷達賽道目前處于領(lǐng)先位置。在該公司舉辦的以“數(shù)字化,新潮流”為主題的技術(shù)論壇上,電子發(fā)燒友網(wǎng)記者采訪了Uhnder首席執(zhí)行官兼聯(lián)合創(chuàng)始人Manju Hegde,他詳細闡述了Uhnder在4D數(shù)字成像雷達方面的技術(shù)領(lǐng)先優(yōu)勢,以及借助4D數(shù)字成像雷達,現(xiàn)階段的輔助駕駛,未來的自動駕駛,將會得到怎樣的性能加持。

Uhnder首席執(zhí)行官兼聯(lián)合創(chuàng)始人Manju Hegde
4D數(shù)字成像雷達的領(lǐng)先性
雷達在汽車領(lǐng)域有悠久的發(fā)展歷史,目前依然是汽車智能感知系統(tǒng)中的重要傳感器之一。不過,傳統(tǒng)車載毫米波雷達測高能力不足,輸出信息質(zhì)量與攝像頭、激光雷達的信息輸出質(zhì)量不在同一量級,4D成像雷達通過類似于激光雷達點云成像的方式改變了這一點。當然,雷達技術(shù)演進也是遞進式的,開始是3D到4D,然后是4D到4D數(shù)字成像。
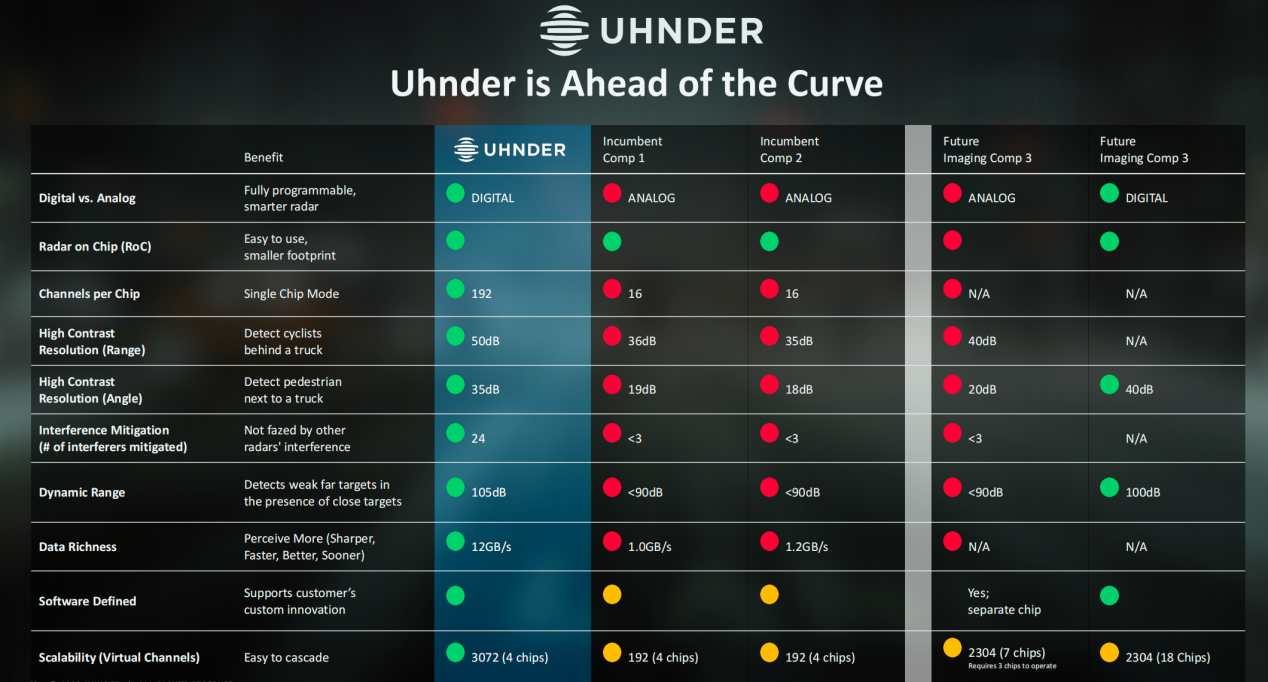
一般模擬雷達的通道數(shù)只有12-16個,分辨率較差。而Uhnder的4D數(shù)字成像雷達芯片提供最高192個虛擬通道,因此分辨率會得到顯著提升。在對比度上,如果車旁邊有位成人/小孩,模擬雷達便無法檢測到,Uhnder的4D數(shù)字成像雷達則能夠很好地避免這一情況。另外,在目標反射功率、抗干擾性、傳感器融合能力和安全性等方面,Uhnder的4D數(shù)字成像雷達解決方案都更具優(yōu)勢。
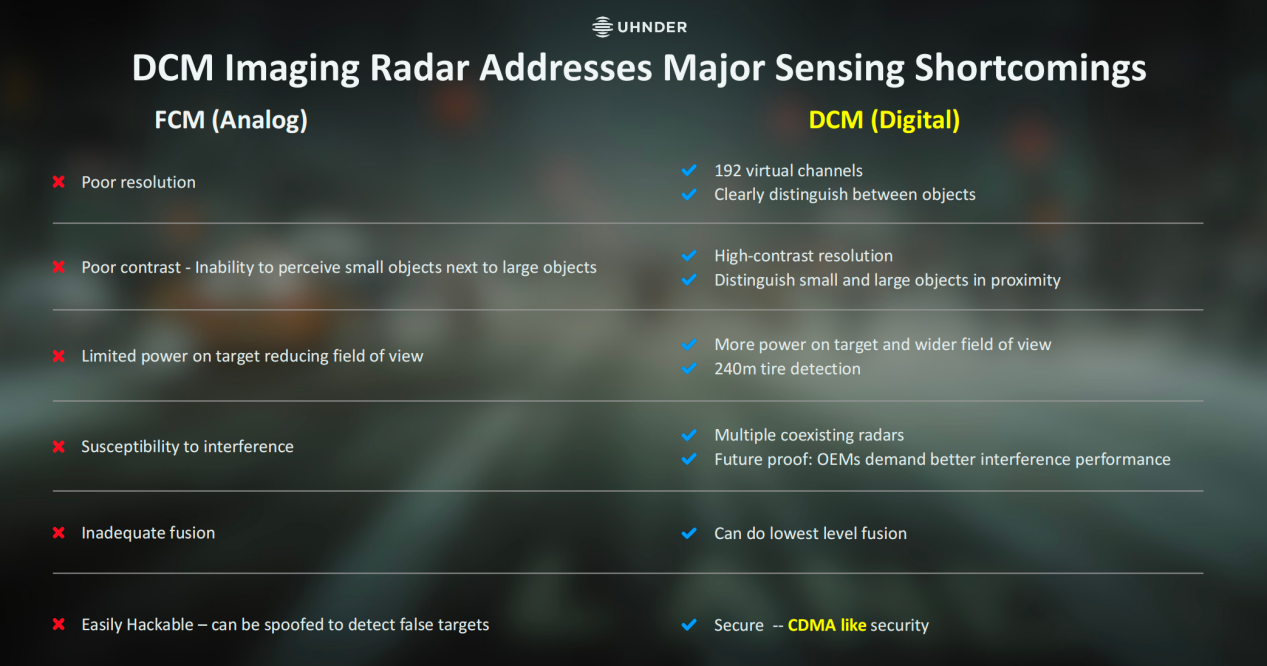
模擬雷達和數(shù)字雷達對比
通過Manju Hegde分享的下圖也可以看到,不僅是優(yōu)于模擬雷達,4D數(shù)字成像雷達相較于激光雷達和攝像頭而言,也做到了很好的性能補充,將能夠為輔助駕駛和自動駕駛帶來全面的性能和體驗提升。
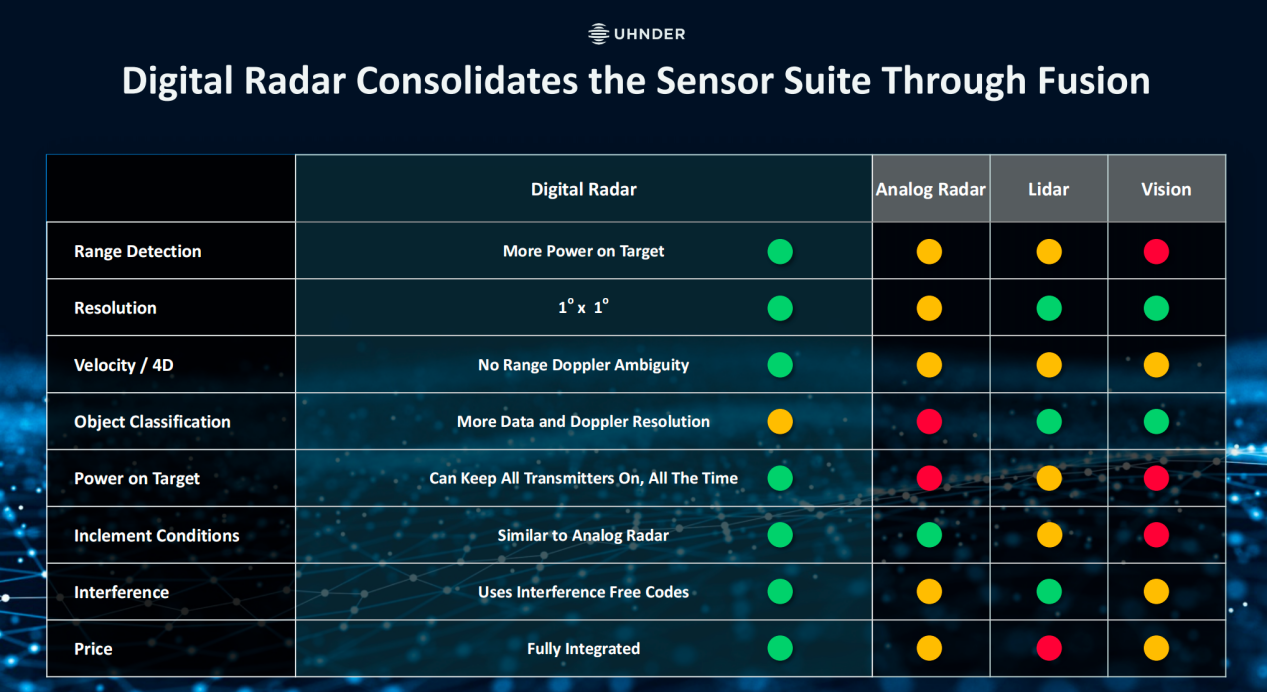
數(shù)字雷達和模擬雷達、激光雷達、攝像頭對比
2022年3月1日,我國正式實施《汽車駕駛自動化分級》(GB/T 40429-2021)國家標準,與國際汽車工程學(xué)會的劃分大體一致,將駕駛自動化劃分為6個等級,0級是應(yīng)急輔助,1級是部分駕駛輔助,2級是組合駕駛輔助,3級是有條件自動駕駛,4級是高度自動駕駛,5級是完全自動駕駛。
Manju Hegde在分享時提到,L2級自動駕駛實現(xiàn)至少需要3顆雷達——1個前置雷達和2個后置雷達,有時還需要在此基礎(chǔ)上增加兩個前置雷達,L3級自動駕駛可能需要6顆雷達,L4級自動駕駛可能是8-12個雷達。如此來看,車載雷達未來前景是非常好的。
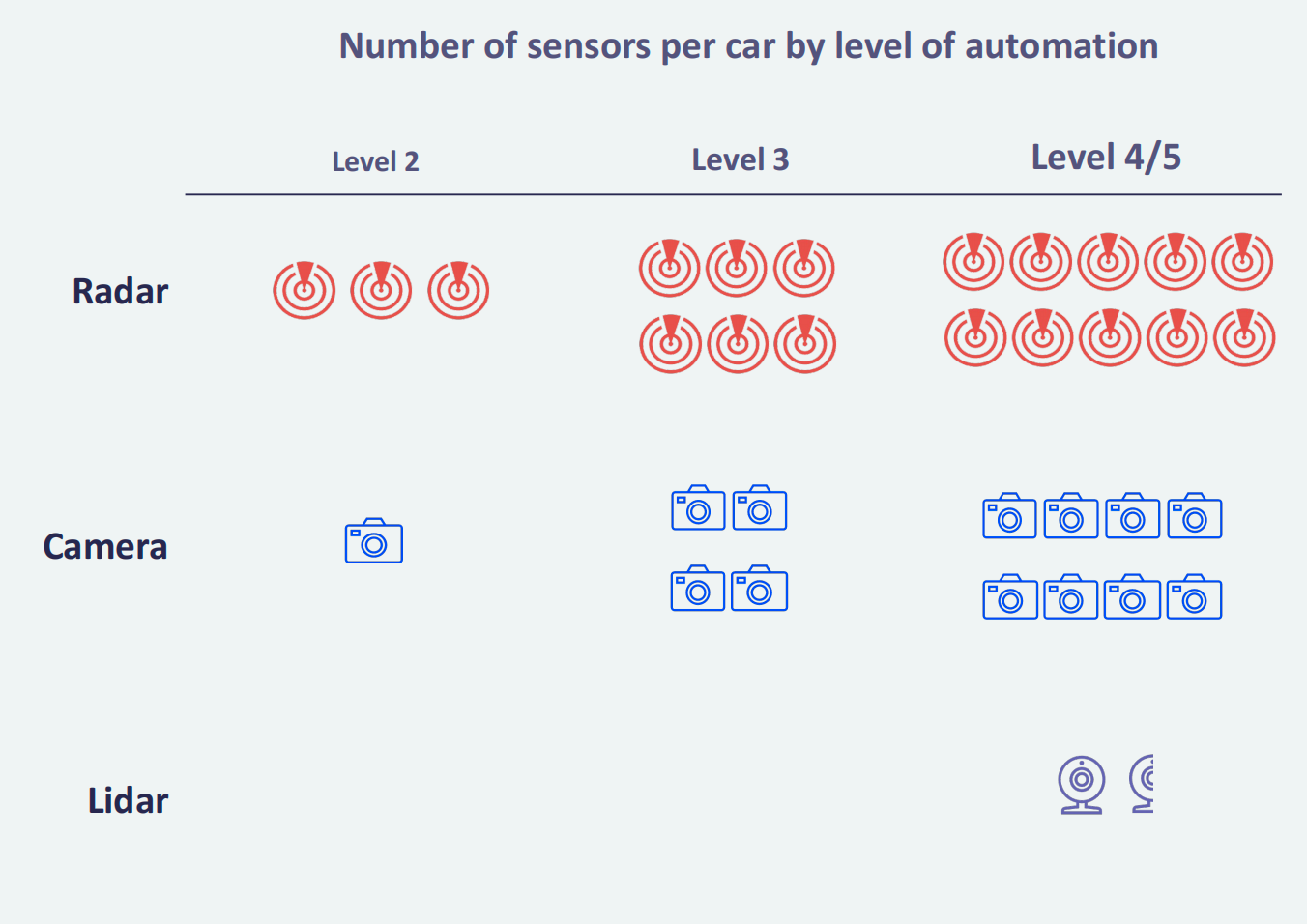
自動駕駛方案傳感器配置
從發(fā)展現(xiàn)狀來看,目前整個4D成像雷達市場還處于發(fā)展早期階段,市面上大部分車型采用的依然是傳統(tǒng)毫米波雷達。比如在中國市場,根據(jù)智研咨詢的統(tǒng)計數(shù)據(jù),2021年我國毫米波雷達出貨量已達2000萬顆,同比增幅超40%;到2026年出貨量有望超7000萬顆。實際上全球的情況也基本類似。Yole預(yù)測4D雷達將在2028年達到約60%的市場占比。2028年4D雷達市場規(guī)模將達到83億美元,較2022年增長36%;4D成像雷達市場規(guī)模將達22億美元,較2022年增長49%。
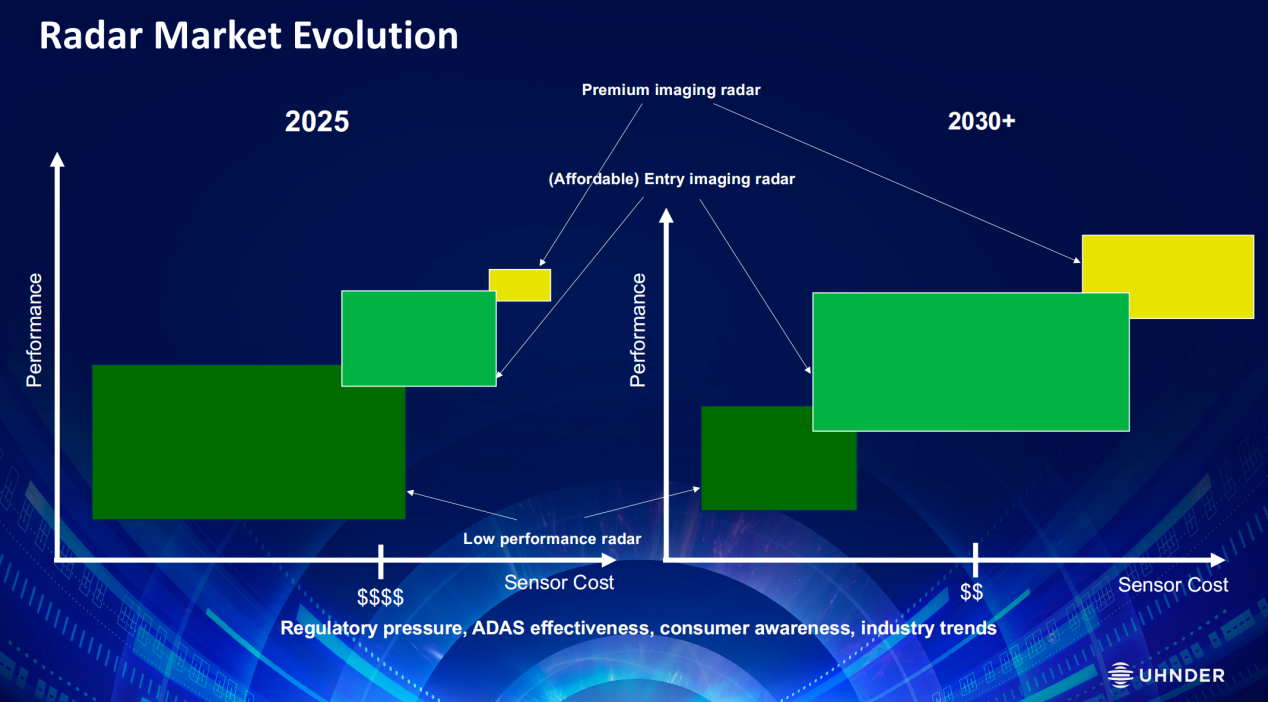
雷達市場解讀
4D數(shù)字成像雷達如何融入現(xiàn)有方案
要兌現(xiàn)上述提到的市場潛力,那么現(xiàn)階段我們就需要看到4D成像雷達對智能駕駛有什么價值?在這里面,Uhnder的4D數(shù)字成像雷達在實現(xiàn)智能駕駛方案時,又會展現(xiàn)出怎樣的領(lǐng)先性。
首先是如何融入當前的自動駕駛方案中,目前L2級自動駕駛方案已經(jīng)有一些固定方案,比如5V5R、6V5R或者11V5R等。對于這套體系,Manju Hegde表示:“Uhnder的4D數(shù)字成像雷達基本可以實現(xiàn)無縫對接Tier1和整車廠OEM的現(xiàn)有方案,其部署和傳統(tǒng)模擬雷達是一樣的。友商可能僅為Tier1和整車廠OEM提供一個設(shè)計參考平臺,沒有任何軟件支持。但我們會提供經(jīng)過 SPICE 認證的軟件設(shè)計支持,軟件團隊是我們公司非常重要的組成部分,我們還會提供API,方便Tier1和整車廠OEM在雷達上部署他們的算法。”
“Uhnder的4D數(shù)字成像雷達在架構(gòu)設(shè)計上有自己的獨特之處,我們的芯片內(nèi)嵌信號處理設(shè)計,因此不需要額外的處理器加持。友商想要達到相同的性能水平需要5顆芯片:4 顆FMCW芯片+1顆FPGA芯片或特殊的雷達處理器。因此我們的性價比是明顯優(yōu)于競品的,為智能安全駕駛帶來更高性能的同時實現(xiàn)降本增效。”Manju Hegde提到。
Uhnder 4D數(shù)字成像雷達和競品對比
在現(xiàn)有自動駕駛方案中,還有一顆關(guān)鍵器件——激光雷達,關(guān)于激光雷達和4D成像雷達的爭論已經(jīng)持續(xù)了很久。對此,Manju Hegde認為:“激光雷達和雷達之間的關(guān)系是很微妙的,激光雷達在光頻率方面比較有優(yōu)勢,高性能激光雷達可以獲得微米級的分辨率,雖然汽車可能用不到這么高的分辨率。從商業(yè)化、汽車安全性和性價比角度出發(fā),雷達可能還是要更勝一籌。”
不過,他也指出,激光雷達和4D成像雷達的爭論基本是在L2級自動駕駛階段,到了L3級自動駕駛將會開始融合,到L4級及以上時就會成為合作互補的方案。
此次活動上,Uhnder展示了領(lǐng)先的 4D 數(shù)字成像雷達解決方案在高級駕駛輔助系統(tǒng)(ADAS)領(lǐng)域的最新發(fā)展和應(yīng)用,并分享了與合作伙伴共同開發(fā)的 ICON 雷達(已量產(chǎn))、奧迪 MARS 樣機、原型機及評估套件等。
結(jié)語
從3D雷達到 4D 數(shù)字成像雷達,產(chǎn)品技術(shù)不斷進化讓雷達在自動駕駛領(lǐng)域擁有廣闊的發(fā)展前景。現(xiàn)階段,4D 數(shù)字成像雷達依然是一項比較新的技術(shù),但Uhnder的方案加速了4D 數(shù)字成像雷達上車的進程。目前,國內(nèi)已經(jīng)開始L3級和L4級自動駕駛試點,隨著高階自動駕駛時代到來,4D 數(shù)字成像雷達擁有巨大的發(fā)展?jié)摿ΑW鳛檫@個領(lǐng)域的領(lǐng)先玩家,Uhnder也會大受裨益。
-
智能駕駛
+關(guān)注
關(guān)注
4文章
2798瀏覽量
49876
發(fā)布評論請先 登錄
Litestar 4D:運動場所照明
LITESTAR 4D應(yīng)用:運動場照明設(shè)計流程
黑芝麻智能視覺與4D毫米波雷達前融合算法介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論