") 基于CW32的無刷直流空心杯電機(jī)無感方波控制驅(qū)動(dòng)方案
基于CW32的無刷直流空心杯電機(jī)無感方波控制驅(qū)動(dòng)方案

1. 方案概述
本方案采用CW32F030C8T6作為主控芯片,采用無感方波控制算法控制無刷直流空心杯電機(jī)。CW32F030C8T6是一款高性能、低功耗的32位微控制器,具有豐富的片上外設(shè)資源,可以適合用于電機(jī)控制。無感方波控制算法是一種簡單有效的電機(jī)控制算法,不需要使用霍爾傳感器,可以降低硬件成本。
本次采用的電機(jī)驅(qū)動(dòng)板仍然為CW32_BLDC_EVA V5開發(fā)板,具體開發(fā)板的信息可以翻看上一節(jié)《基于CW32的無刷空心杯電機(jī)有感控制驅(qū)動(dòng)方案》,采用的空心杯電機(jī)與上一節(jié)有所不同,這次使用的空心杯電機(jī)的額定電壓為 24 V。
由于本次采用無感方案,所以只需要將 U、V、W三相電源接上即可,并且三相的順序并無強(qiáng)制要求,下面我們重心將放在對(duì)于無感方波控制的原理部分。
2. 無感方波控制原理
無感方波控制(Sensorless Square Wave Control)是一種用于無刷直流電機(jī)(BLDC)驅(qū)動(dòng)的控制方法。與傳統(tǒng)的有感控制方法相比,無感方波控制不需要使用位置或速度傳感器來反饋電機(jī)狀態(tài),而是通過檢測電機(jī)自身的懸空相反電動(dòng)勢變化(Back Electromotive Force,簡稱BEMF)來實(shí)現(xiàn)控制。
在無感方波控制中,通過檢測電機(jī)的懸空相電壓的過零點(diǎn),可以推斷出電機(jī)轉(zhuǎn)子的位置,根據(jù)轉(zhuǎn)子位置進(jìn)行步狀態(tài)的切換即可控制電機(jī)轉(zhuǎn)動(dòng)。
2.1 梯形波電壓
無感方波的驅(qū)動(dòng)電路采用三相全橋逆變電路,在理想的情況下,三相全橋逆變電路的電壓波形如下圖2-1所示,每相導(dǎo)通角度為120°,相與相之間相隔120°。
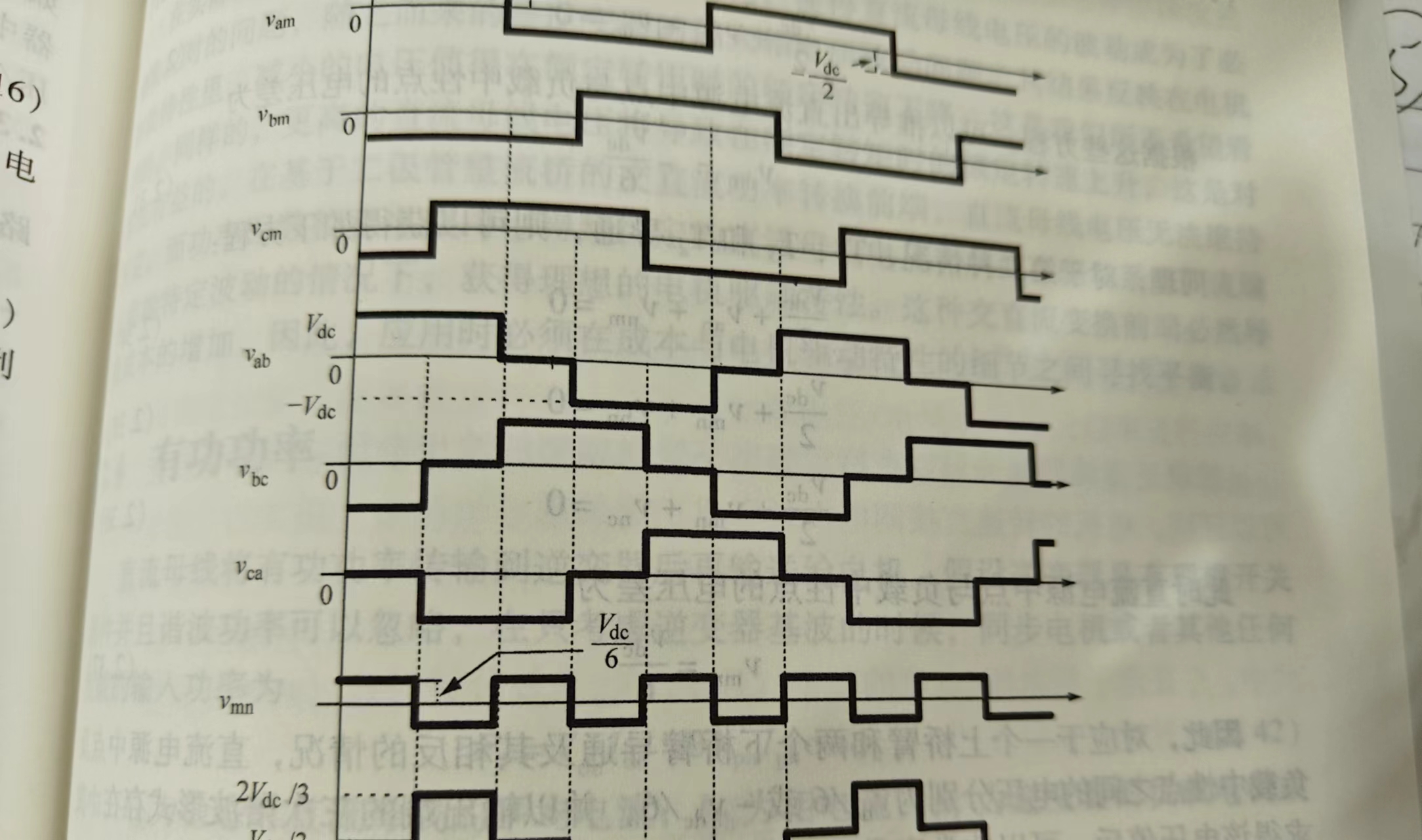
圖2-1 三相全橋逆變電壓波形
無刷直流電機(jī)驅(qū)動(dòng)所需的電流波形也是上圖里的方波,因?yàn)殡姍C(jī)存在漏感 L ,定子電流會(huì)有一定的上升和下降時(shí)間,所以使得理想的方波變成了梯形波。

圖2-2 BLDC運(yùn)行三相電壓波形
從圖2-2中可以看出,無刷直流電機(jī)實(shí)際運(yùn)行時(shí)的三相電壓波形并不是圖2-1里的方波,而是梯形波。由于采用了脈寬調(diào)制計(jì)數(shù)(PWM),所以波形看上去由一道道脈沖組成。
2.2 確定換相信號(hào)
無感方波驅(qū)動(dòng)與有感最大的區(qū)別就在于獲取換相信號(hào)的方式不同,有感方波通過檢測三相霍爾信號(hào)的電平,再根據(jù)三相電平確定電機(jī)此時(shí)應(yīng)該運(yùn)行在的步狀態(tài);無感方波是檢測梯形波“斜線”上的反電動(dòng)勢電壓來確定換相時(shí)刻。霍爾信號(hào)對(duì)應(yīng)的相是確定的,所以電機(jī)的供電相也要根據(jù)霍爾相的順序來連接,而無感方波驅(qū)動(dòng)只需要檢測“斜線”上的“過零點(diǎn)”確定換相時(shí)刻后自動(dòng)換相到下一步狀態(tài),而每一個(gè)步狀態(tài)對(duì)應(yīng)事先已經(jīng)安排好的開關(guān)管通斷,所以電機(jī)的供電相可以隨意連接。


圖2-3 反電動(dòng)勢采樣電路
PA0、PA1、PA5分別對(duì)應(yīng)CW32F030 ADC的0、1、5通道,我們使用ADC采集三相的電壓,但在“過零點(diǎn)”比較中我們實(shí)際使用的是未導(dǎo)通相,即懸空相的電壓。
2.3 電機(jī)驅(qū)動(dòng)思路
驅(qū)動(dòng)電機(jī)旋轉(zhuǎn)的原理與上一章有感驅(qū)動(dòng)的原理相同,本質(zhì)上是對(duì)電機(jī)定子的通電情況進(jìn)行控制,也稱為換相。這里我們結(jié)合上一章霍爾傳感器的信號(hào)波形與電機(jī)運(yùn)行時(shí)的三相電壓波形來看,如下圖。
暫時(shí)無法在飛書文檔外展示此內(nèi)容
我們將電機(jī)運(yùn)行狀態(tài)分為三種: 停止、啟動(dòng)、運(yùn)行 ,其中停止?fàn)顟B(tài)不需要過多關(guān)注。首先是電機(jī)的啟動(dòng),啟動(dòng)狀態(tài)首先要對(duì)轉(zhuǎn)子進(jìn)行定位,因?yàn)殡姍C(jī)在停止時(shí)轉(zhuǎn)子可以在任何位置。確定轉(zhuǎn)子的位置可以給某一步狀態(tài)對(duì)應(yīng)的 MOS 管通電,等待一小段轉(zhuǎn)子復(fù)位的時(shí)間后,轉(zhuǎn)子就在此步狀態(tài)中,然后進(jìn)入啟動(dòng)階段。
無感電機(jī)的啟動(dòng)也稱為“強(qiáng)拖”,以復(fù)位時(shí)的步狀態(tài)為基準(zhǔn),手動(dòng)換步,之后若檢測到 “過零點(diǎn)”,則切入第三種正常運(yùn)行的狀態(tài),如果沒有檢測到,則提高占空比再手動(dòng)換步,嘗試一定次數(shù)后如果沒有成功則電機(jī)啟動(dòng)失敗。
正常運(yùn)行狀態(tài)時(shí),在每次輸出 PWM 脈沖時(shí)由比較器觸發(fā) ADC 采樣,根據(jù)當(dāng)前步狀態(tài)確定要使用的反電動(dòng)勢在哪一相。取得反電動(dòng)勢后需要判斷是否已經(jīng)來到 “過零點(diǎn)”,這里還需要判斷當(dāng)前步狀態(tài)是電壓上升還是下降狀態(tài):上升狀態(tài)需要判斷反電動(dòng)勢大于 “過零點(diǎn)” 值,下降狀態(tài)需要判斷反電動(dòng)勢小于 “過零點(diǎn)”值。還需要注意的是,ADC的采樣時(shí)刻的選擇會(huì)影響到 “過零點(diǎn)”值的大小:如果是在 PWM 高電平時(shí)采集,則過零點(diǎn)值為電源電壓的一半;低電平時(shí)的比較值需要自己根據(jù)實(shí)際大小去調(diào)試。通常在 PWM 占空比大于 50% 時(shí)采樣高電平,低于 50%時(shí)采樣低電平。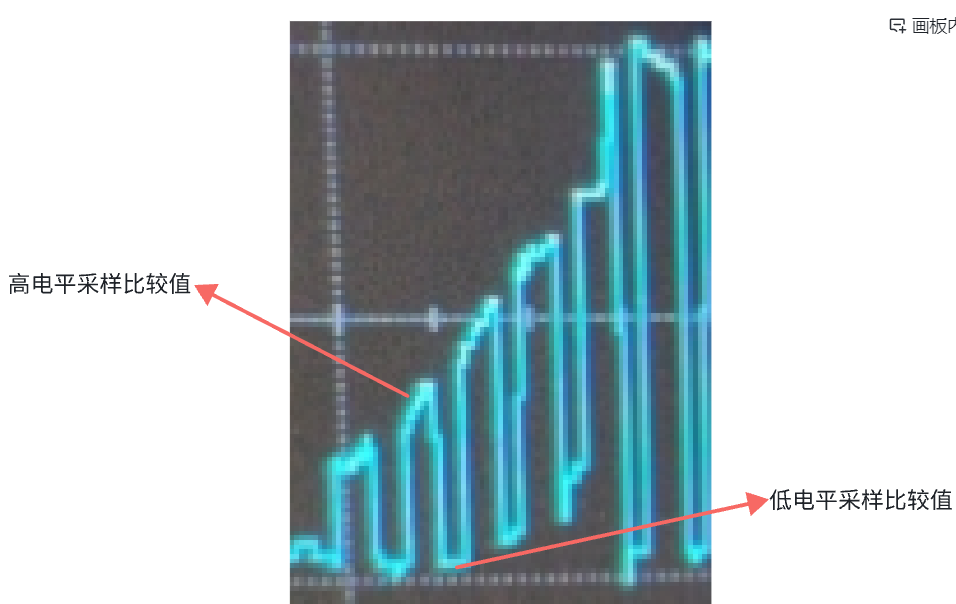
圖2-5 采樣點(diǎn)比較值選擇
在檢測到 “過零點(diǎn)” 之后,需要延遲一定的時(shí)間再進(jìn)行換相,以保證電機(jī)的轉(zhuǎn)矩。延遲時(shí)間由定時(shí)器記錄的上次換相到本次換相的時(shí)間間隔,取其部分大小作為延遲時(shí)間。
注意,電機(jī)在換相時(shí)由于新的電流通路的建立,電壓在換相處會(huì)產(chǎn)生尖峰毛刺,此時(shí)進(jìn)行 ADC 電壓采集到的數(shù)據(jù)是不準(zhǔn)確的,所以在換相后還需要進(jìn)行退磁狀態(tài)的判斷,如果處于退磁狀態(tài),則本次不采樣。
3. 軟件設(shè)計(jì)
3.1 MCU資源分配
本次使用到的CW32內(nèi)部資源如下:
- ATIM :CH1、CH2、CH3 三個(gè)通道比較產(chǎn)生 PWM 波用于驅(qū)動(dòng)電機(jī),CH4為芯片內(nèi)部通道,無外部引腳,只有一路比較捕獲寄存器 (ATIM_CH4CCR),且只能用于比較,不能用來捕獲。我們使用 CH4 的比較功能觸發(fā) DMA 傳輸。
- DMA :使用4路 DMA 通道:CH1、CH2、CH3、 CH4:
- CH1 將 ADC 單次單通道的采樣結(jié)果傳入 RAM
- CH2 將 ADC 的 CR1 寄存器的配置值從 RAM 傳入寄存器
- CH3 將 ADC 的 START 寄存器的配置值從 RAM 傳入寄存器
- CH1、CH2、CH3由 ADC 硬件觸發(fā),CH4 由 ATIM 硬件觸發(fā),啟動(dòng) ADC
- ADC :ADC 采樣的時(shí)鐘設(shè)置需要與 PWM 載波頻率結(jié)合,計(jì)算采樣時(shí)間;采用單通道單次采樣,首次采樣由 ATIM 硬件觸發(fā),ADC 轉(zhuǎn)換完畢后觸發(fā) DMA 傳輸,通過 DMA 傳輸自動(dòng)改變采樣通道。這樣設(shè)置可以實(shí)現(xiàn) ATIM 觸發(fā)一次就采樣五個(gè)數(shù)據(jù)(U、V、W 相電壓、母線電壓、外部電位器調(diào)速電壓)
- BTIM1 :BTIM1 設(shè)置 1ms 進(jìn)入一次中斷,在中斷里改變標(biāo)志位實(shí)現(xiàn)主程序的控制
- BTIM2 :BTIM2 作為換相時(shí)間間隔的記錄定時(shí)器,決定延遲多長時(shí)間后換相
- BTIM3 :BTIM3 設(shè)置中斷,在中斷里完成退磁和換相
3.2 部分重要程序介紹
操作 ATIM CH4 的 CCR 寄存器,可以選擇 ADC 在一個(gè) PWM 周期內(nèi)不同位置的采樣:
CW_ATIM- >CH4CCR=(數(shù)字);
首先是核心函數(shù):調(diào)制換相
/*step,為當(dāng)前換相序號(hào),PWM_ON_flag=1時(shí)啟動(dòng)PWM輸出
**Step_Last,記錄上一次步狀態(tài)用于 PWM 占空比的刷新
**Step_Time,記錄上一次換相時(shí)間
**Flag_Start_OK,判斷電機(jī)是否啟動(dòng)成功
**Flag_Demagnetize_State,判斷退磁狀態(tài),1:需要退磁;2:退磁完成;3:檢測到過零點(diǎn),可以換相
**HALLcount,記錄換相次數(shù)用于轉(zhuǎn)速計(jì)算
*/
void Commutation(uint32_t step,uint32_t PWM_ON_flag)
{
if(PWM_ON_flag==0) //不啟動(dòng)則關(guān)閉輸出
{
CW_ATIM- >CH1CCRA=0;CW_ATIM- >CH2CCRA=0;CW_ATIM- >CH3CCRA=0;
PWM_AL_OFF; PWM_BL_OFF;PWM_CL_OFF;
CW_ATIM- >CH4CCR=PWM_TS-800;
return;
}
//關(guān)閉下管
if(step==0||step==5){PWM_AL_OFF;PWM_CL_OFF;}
else if(step==1||step==2){PWM_AL_OFF;PWM_BL_OFF;}
else if(step==3||step==4){PWM_BL_OFF;PWM_CL_OFF;}
//打開上管
if(step==0||step==1){CW_ATIM- >CH2CCRA=0;CW_ATIM- >CH3CCRA=0;CW_ATIM- >CH1CCRA=OutPwm;}
if(step==2||step==3){CW_ATIM- >CH1CCRA=0;CW_ATIM- >CH3CCRA=0;CW_ATIM- >CH2CCRA=OutPwm;}
if(step==4||step==5){CW_ATIM- >CH1CCRA=0;CW_ATIM- >CH2CCRA=0;CW_ATIM- >CH3CCRA=OutPwm;}
//打開下管
if(step==0||step==5){PWM_BL_ON;}//AB
else if(step==1||step==2){PWM_CL_ON;}//AC
else if(step==3||step==4){PWM_AL_ON;}//BA
Step_Last=step;
//判斷占空比修改采樣時(shí)刻
if(OutPwm >=1200&&Flag_ON_or_OFF==0){Flag_ON_or_OFF=1;CW_ATIM- >CH4CCR=300;}
else if(OutPwm< 1200&&Flag_ON_or_OFF==1){Flag_ON_or_OFF=0;CW_ATIM- >CH4CCR=PWM_TS-600; }
//記錄上一次的換相時(shí)間
Step_Time=BTIM_GetCounter(CW_BTIM2);
BTIM_SetCounter(CW_BTIM2,0);
//電機(jī)未啟動(dòng)則快速換相
if(Flag_Start_OK==0)
BTIM_SetAutoreload(CW_BTIM3,Step_Time/8);
else
BTIM_SetAutoreload(CW_BTIM3,Step_Time/6);//退磁延遲時(shí)間
BTIM_SetCounter(CW_BTIM3,0);
BTIM_Cmd(CW_BTIM3, ENABLE);
//啟動(dòng)退磁
Flag_Demagnetize_State=1;//退磁狀態(tài)
HALLcount++;
}
接著是第二個(gè)核心:換相。
/*Direction,電機(jī)運(yùn)行方向,0:步狀態(tài)012345,1:步狀態(tài)054321
**Cur_Step,電機(jī)目前的步狀態(tài),步狀態(tài)正常運(yùn)行順序?yàn)?012345、543210。0:AB、1:AC ……
*/
void BTIM3_IRQHandler(void)
{
if(BTIM_GetITStatus(CW_BTIM3, BTIM_IT_OV))
{
BTIM_ClearITPendingBit(CW_BTIM3, BTIM_IT_OV);
if(Flag_Demagnetize_State == 1) //說明退磁結(jié)束后第一次進(jìn)入BTIM3中斷
{
Flag_Demagnetize_State = 2; //退磁結(jié)束標(biāo)志
BTIM_Cmd(CW_BTIM3, DISABLE);
}
else if(Flag_Demagnetize_State == 3 && Flag_Start_OK == 1) //退磁完成和啟動(dòng)成功后,決定下一次換相
{
BTIM_Cmd(CW_BTIM3, DISABLE);
if(Direction == 0) //與RisingFalling的順序要對(duì)應(yīng)
{
Cur_Step++;
if(Cur_Step == 6)Cur_Step = 0;
}
else
{
if(Cur_Step == 0)Cur_Step = 5;
else Cur_Step--;
}
Commutation(Cur_Step,Motor_Start_F);
}
}
}
過零點(diǎn)比較函數(shù)如下,此函數(shù)在 ADC 完成五次采樣后調(diào)用。
/*SampleData[5] U反電動(dòng)勢 V反電動(dòng)勢 母線電壓 W反電動(dòng)勢 電位器調(diào)速電壓值
**TAB_BEMFChannel[6]={3,1,0,3,1,0};
**TAB_RisingFalling[2][6]={//判斷此刻電壓為上升沿還是下降沿,Rising=1;Falling=2
{FALLING,RISING,FALLING,RISING,FALLING,RISING},
{RISING,FALLING,RISING,FALLING,RISING,FALLING} }
**Flag_ON_or_OFF,高低電平采樣標(biāo)志位
**RisingFalling,上升沿下降沿比較標(biāo)志位
**Count_0V,過零點(diǎn)檢測計(jì)數(shù) STCount = 15
**Flag_Confirm,啟動(dòng)確認(rèn)標(biāo)志位
*/
void ADC_Process(void)
{
static uint8_t count = 0; //過零檢測計(jì)數(shù)
uint32_t Voltage_Bus = 0; //母線電壓
uint8_t Flag_0V = 0; //成功檢測到過零點(diǎn)標(biāo)志
if(Flag_Demagnetize_State != 2)return; //說明退磁未結(jié)束
BEMFConvertedValue =SampleData[TAB_BEMFChannel[Cur_Step]]; //取得反電動(dòng)勢
RisingFalling=TAB_RisingFalling[Direction][Cur_Step]; //判斷上升沿還是下降沿
if(Flag_ON_or_OFF == 0)Voltage_Bus = 50; //在PWM低電平時(shí)采樣則與地比較電壓
else Voltage_Bus = SampleData[2]; //在PWM高電平時(shí)采樣則與電源正極比較電壓
if(RisingFalling == FALLING)
{
if(BEMFConvertedValue < Voltage_Bus)
{
count++;
if(count >= 2) //連續(xù)兩次都檢測到過零,則認(rèn)為確實(shí)過零了
{
count = 0;
Flag_Demagnetize_State = 3; //退磁完成,可以換相
Count_0V++;
Flag_Confirm = 1;
Flag_0V = 1; //成功檢測到過零點(diǎn)
}
}
else count = 0;
}
else if(RisingFalling == RISING)
{
if(BEMFConvertedValue > Voltage_Bus)
{
count++;
if(count >= 2)
{
count = 0;
Flag_Demagnetize_State = 3;
Count_0V++;
Flag_Confirm = 1;
Flag_0V = 1;
}
}
else count = 0;
}
if(Count_0V >= STCount && Flag_Start_OK == 0)
{
Flag_Start_OK = 1; //連續(xù)檢測到固定數(shù)量的過零時(shí),認(rèn)為啟動(dòng)成功
}
if(Flag_Start_OK == 1 && Flag_0V == 1)
{
Flag_0V = 0;
BTIM_SetAutoreload(CW_BTIM3,Step_Time/8); //換相延遲時(shí)間
BTIM_SetCounter(CW_BTIM3,0);
BTIM_Cmd(CW_BTIM3, ENABLE);
}
}
最后是電機(jī)的啟動(dòng)部分:
/*TimeCountTemp,計(jì)時(shí),1ms增加1
**Com_time, 啟動(dòng)次數(shù)
**RAMP_TABLE[64],存儲(chǔ)時(shí)間的數(shù)組
*/
do
{
if(Direction == 0) //與RisingFalling的順序要對(duì)應(yīng)
{
Cur_Step++;
if(Cur_Step >= 6)Cur_Step = 0; //以復(fù)位時(shí)的步狀態(tài)為基準(zhǔn),手動(dòng)換步
}
else
{
if(Cur_Step == 0)Cur_Step = 5;
else Cur_Step--;
}
Flag_Confirm = 0;
if(Flag_Start_OK == 0)
{
Commutation(Cur_Step,Motor_Start_F);
}
TimeCountTemp = 0;
while(TimeCountTemp < RAMP_TABLE[Com_time]) //等待過零點(diǎn)檢測
{
if(Flag_Confirm == 1 || Flag_Start_OK == 1)break; //啟動(dòng)成功則不再執(zhí)行do.....while里的內(nèi)容
}
Com_time++;
OutPwm+=10; //沒有啟動(dòng)則依次提高占空比
}while(Flag_Start_OK==0 && Com_time< 60 && ErrorCode==0);
//跳出循環(huán)則 啟動(dòng)成功/超出啟動(dòng)次數(shù)/啟動(dòng)報(bào)錯(cuò)
4. 調(diào)試心得
- 在調(diào)試電機(jī)的過程中要做好限流保護(hù),電機(jī)換相失敗會(huì)導(dǎo)致其停在某一相,對(duì)應(yīng)的MOS 管持續(xù)導(dǎo)通。
- 退磁延遲時(shí)間和延遲換相時(shí)間的設(shè)置會(huì)影響電機(jī)的性能,過早地?fù)Q相會(huì)降低電機(jī)轉(zhuǎn)矩,過晚地?fù)Q相會(huì)使電機(jī)電流過大,效率較低發(fā)熱嚴(yán)重。
- 電壓比較值的設(shè)置同樣會(huì)造成上一條的影響,在低電平時(shí)采樣比較的值如果設(shè)置過小,會(huì)造成上升沿處換相過早、下降沿處換相過晚的后果。
- 電機(jī)的啟動(dòng)需要緩慢進(jìn)行,不可以將 PWM 的占空比增加過快,否則電機(jī)容易換相失敗。
- BTIM3中斷服務(wù)程序里的方向檢測設(shè)置要與數(shù)組 TAB_RisingFalling 里的 Rising 和 Falling 順序?qū)?yīng),否則會(huì)啟動(dòng)失敗。
- 由于空心杯電機(jī)的內(nèi)部為三角形接線,在 PWM 低電平時(shí)仍保有較多的能量,所以在 MOS 管關(guān)斷期間的反電動(dòng)勢較高,并且隨著轉(zhuǎn)速的增加此電壓的大小呈上升態(tài)勢。對(duì)于 “過零點(diǎn)” 電壓數(shù)據(jù)的設(shè)置也需要適應(yīng)這種變化,下圖展示了空心杯電機(jī)運(yùn)行在 35000 rpm 時(shí)的一相電壓波形。


圖4-1 空心杯電機(jī)運(yùn)行電壓波形
審核編輯 黃宇
-
電機(jī)
+關(guān)注
關(guān)注
143文章
9273瀏覽量
148827 -
無刷直流電機(jī)
+關(guān)注
關(guān)注
61文章
700瀏覽量
47423 -
控制驅(qū)動(dòng)
+關(guān)注
關(guān)注
0文章
11瀏覽量
8544 -
方波控制
+關(guān)注
關(guān)注
0文章
10瀏覽量
5066 -
CW32
+關(guān)注
關(guān)注
1文章
243瀏覽量
1173
發(fā)布評(píng)論請(qǐng)先 登錄
無刷直流電機(jī)的控制研究
CW32L010 ESC Driver 電機(jī)控制套件使用
【電機(jī)】了解無刷直流電機(jī)BLDC
電機(jī):無刷直流電機(jī)的原理
靜音、高效、智能,無刷電推剪驅(qū)動(dòng)方案的技術(shù)亮點(diǎn)--其利天下

其利天下無刷水泵驅(qū)動(dòng)方案性能參數(shù)細(xì)節(jié)

無感無刷直流電機(jī)驅(qū)動(dòng)全攻略
無刷電機(jī)和空心杯電機(jī)哪個(gè)好?
空心杯電機(jī)類型有哪些?工作原理是什么?
探索吸塵器無刷直流電機(jī)驅(qū)動(dòng)板的精妙控制方案
探索 MS37549 直流無刷馬達(dá)驅(qū)動(dòng)方案的奧秘
探索無刷直流電機(jī)驅(qū)動(dòng)方案的技術(shù)應(yīng)用
使用TI智能柵極驅(qū)動(dòng)器輕松實(shí)現(xiàn)無刷直流(BLDC)電機(jī)的磁場定向控制(FOC)

ACM6754 24V/4.8A三相無感無刷直流BLDC電機(jī)驅(qū)動(dòng)芯片方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論