") 基于機器人操作的微流控片上檢測方法,提高現(xiàn)場即時診斷的準確性
基于機器人操作的微流控片上檢測方法,提高現(xiàn)場即時診斷的準確性

標準診斷方法由于依賴于醫(yī)療實驗室的基礎(chǔ)設(shè)施和專業(yè)人員,以及耗時的方案、高昂的人工成本和昂貴的設(shè)備等局限性而無法滿足要求。相比之下,即時診斷(POCT)方法利用簡化的儀器和樣本到答案的程序,可在醫(yī)療機構(gòu)之外進行定性診斷。這種簡化的模式加上及時的響應(yīng),使POCT易于采用和廣泛傳播。然而,這些方法往往需要在檢測復雜性和檢測可靠性之間進行權(quán)衡,因此不足以作為獨立的診斷工具。開發(fā)無需人工操作即可處理標準檢測的分散式、可實地部署的實驗室,可提高全球檢測能力,從而為公共安全提供更具成本效益、更方便用戶的醫(yī)療保健服務(wù)。
近期,中國科學技術(shù)大學潘挺睿教授課題組報道了一種可以使用機器人進行操作的微流控片上檢測方法,能夠?qū)崿F(xiàn)多色酶聯(lián)免疫吸附測定(ELISA)。相關(guān)成果以“Multicolor-Assay-on-a-ChipProcessed by Robotic Operation (MAC-pro) with Improved Diagnostic Accuracy forField-deployable Detection”為題發(fā)表在國際化學權(quán)威雜志AnalyticalChemistry上,并被遴選為當期補充期刊封面。
通過利用這種基于機器人進行操作處理的芯片上多色免疫測定(MACpro)方法,該研究可以滿足部署具有自主和可靠疾病診斷能力的分散實驗室的需求。MACpro平臺由機器人-微流控界面和手眼模塊組成,可提供靈活而穩(wěn)定的操作,以可編程的方式執(zhí)行任務(wù),如沿不同路徑精確操作微流控芯片。以干擾素-γ為例,MACpro的檢測靈敏度和檢測范圍相比于傳統(tǒng)方法提高了一個數(shù)量級。
MACpro平臺集成了手眼(EIH)校準功能,通過映射和重建整個平臺上目標的實際坐標,對機器人末端效應(yīng)器進行操作和運動校正。EIH耦合機器人-微流控界面提供了可編程的操作,以執(zhí)行多種任務(wù),如機械搬運(如微流控芯片的取放)和高穩(wěn)定性的流體操作。在微流控芯片的反應(yīng)腔中,裝入抗體結(jié)合微珠可提高抗體固定能力,而抗體的固定能力是影響檢測結(jié)果的關(guān)鍵參數(shù)。此外,MACpro利用AuNRs和蝕刻劑產(chǎn)生信號,取代了傳統(tǒng)ELISA中使用的常規(guī)酶(如辣根過氧化物酶)和底物,可根據(jù)不同濃度的分析物顯示不同的顏色。Cu2?作為催化劑可將蝕刻速度提高約3倍(<20分鐘),從而提高檢測效率。
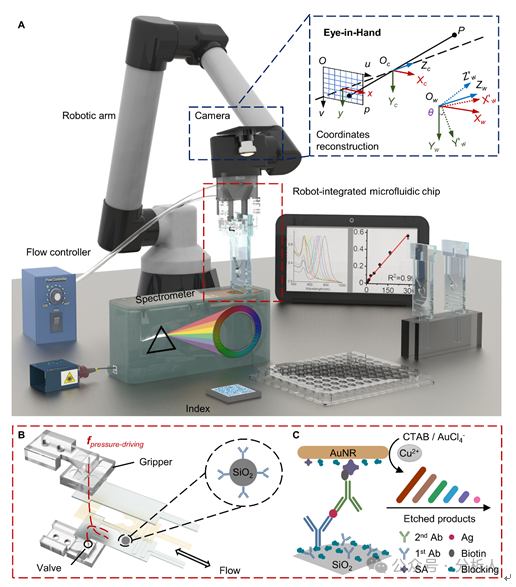
MACpro平臺示意圖
該研究開發(fā)的MACpro平臺通過機械臂的三維移動、末端效應(yīng)器對微流控芯片的取放等程序進行工作。在抓取和夾緊微流控芯片后,末端效應(yīng)器將通過氣動互連與芯片嚙合。末端不對齊會導致氣動壓力出現(xiàn)重大誤差,影響后續(xù)的液體處理過程。通過設(shè)置了手眼校準方法,可以定位芯片的空間坐標,同時校正末端效應(yīng)器的位置,實現(xiàn)機器人與微流控接口的自動分組。

MACpro平臺的功能說明
針對微流控芯片室在干擾素-γ(IFN-γ)濃度為0至600pg/mL時的檢測結(jié)果,數(shù)碼照片可以清晰地顯示出從紅棕色到黃色的漸變色。在45 pg/mL IFN-γ以上,λmax從1100 nm變?yōu)?00 nm。λmax與IFN-γ濃度的校準曲線是通過邏輯擬合繪制的(R2=0.998)。在較低的濃度范圍(0-35 pg/mL),只能在525 nm處測得吸收強度不同的單峰。因此,研究人員用邏輯擬合法繪制了二級校準曲線(R2=0.992)。與標準ELISA相比,檢測靈敏度和動態(tài)檢測范圍均提高10倍。
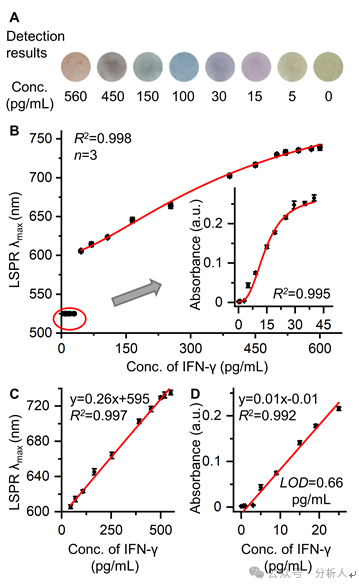
MACpro多色酶聯(lián)免疫吸附試驗的檢測結(jié)果
綜上所述,研究人員開發(fā)了基于機器人集成微流控芯片與等離子體生物傳感器的MACpro平臺。MACpro可自動執(zhí)行涉及標準ELISA的多項任務(wù),如通過手眼校準拾取和放置微流控芯片、高精度進出液處理以及通過光譜儀集成進行比色測量。抗體結(jié)合微珠和AuNRs生物傳感器的等離子刻蝕技術(shù)的應(yīng)用,有助于提高檢測靈敏度和動態(tài)范圍。得益于MACpro平臺的模塊化配置和工作流程的可編程自動化,所介紹的方法有利于現(xiàn)場和實地部署檢測,并可靈活地用于檢測診所和遠程環(huán)境中的各種目標。
論文鏈接: https://doi.org/10.1021/acs.analchem.3c05918
-
機器人
+關(guān)注
關(guān)注
213文章
29597瀏覽量
212110 -
微流控芯片
+關(guān)注
關(guān)注
13文章
302瀏覽量
19267 -
生物傳感器
+關(guān)注
關(guān)注
12文章
384瀏覽量
37819
原文標題:基于機器人操作的微流控片上檢測方法,提高現(xiàn)場即時診斷的準確性
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
手表外殼氣密性檢測儀:如何有效提升檢測效率與準確性
明遠智睿SSD2351開發(fā)板:語音機器人領(lǐng)域的變革力量
盤點#機器人開發(fā)平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
機器人氣密性檢測儀:確保機器人性能的關(guān)鍵

【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
如何提高OTDR測試的準確性
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
如何提高電位測量準確性
【「具身智能機器人系統(tǒng)」閱讀體驗】+數(shù)據(jù)在具身人工智能中的價值
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
如何提升ASR模型的準確性
如何保證測長機測量的準確性?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論