") PNI電子羅盤-TCM-XB 安裝及測試校準的簡要說明
PNI電子羅盤-TCM-XB 安裝及測試校準的簡要說明

介紹
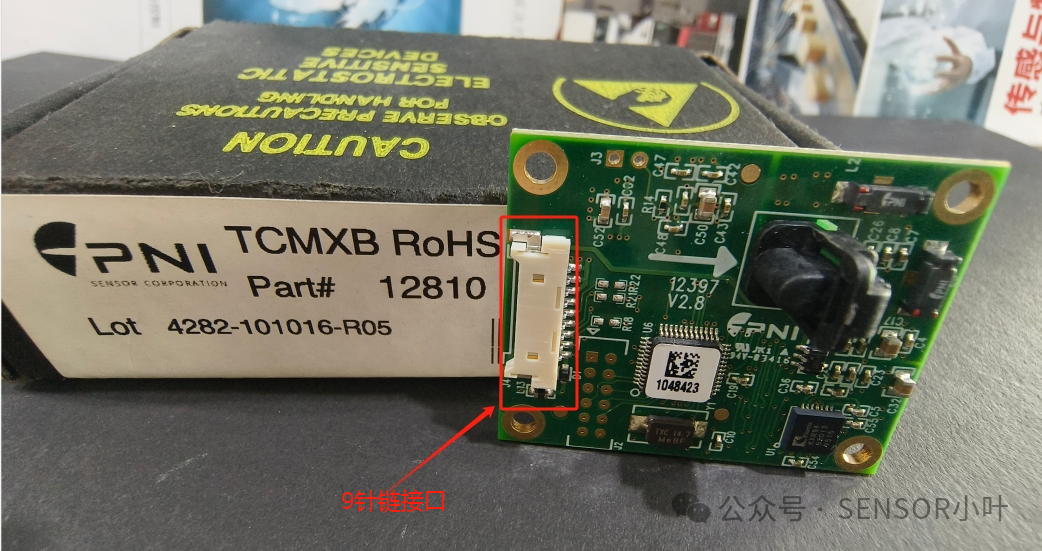
TCM XB(pn12810)或TCMMB(pn13095)傾斜補償?shù)?軸數(shù)字羅盤。TCM是一種高性能、低功耗、傾斜補償?shù)碾娮恿_盤模塊,它集成了PNI的動態(tài)磁失真補償和校準評分算法,以提供行業(yè)領(lǐng)先的頭部精度。TCM結(jié)合了PNI的專利磁感應(yīng)傳感器和測量電路技術(shù)與3軸MEMS加速度計,以實現(xiàn)絕對的協(xié)同效率和性能。
電子羅盤應(yīng)用
無人駕駛飛行器-水下、地面和空中無人駕駛飛行器
遠距離目標定位器和激光測距儀
死亡清算系統(tǒng)
用于校準的傾角受到物理約束的系統(tǒng)
機械結(jié)構(gòu)
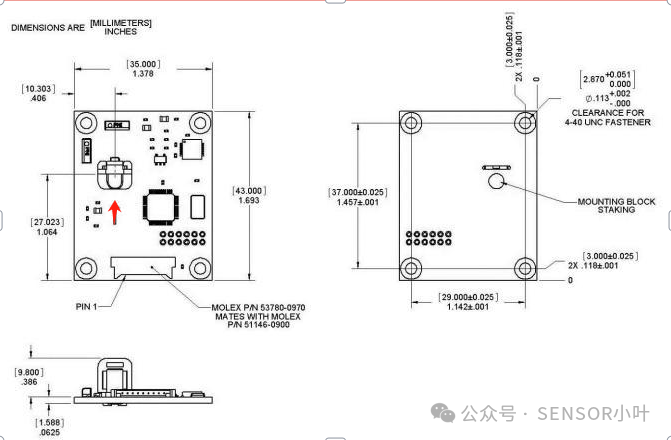
默認的方向是絲印箭頭指向“向前”的方向。
設(shè)置步驟
要在系統(tǒng)中安裝TCM,請遵循以下步驟:
1.與TCM-XB進行電氣連接。
2.使用TCM Studio或二進制終端仿真程序(如RealTerm或TeraTerm)評估TCM,以確保指南針總體上正常工作。(軟件調(diào)試)
3.選擇安裝位置。
4.在主控系統(tǒng)中進行機械安裝TCM-XB。
5.執(zhí)行用戶校準。
詳細說明
第一步:電器連接
TCM XB包含一個9針分子連接器,在完成電氣連接后,最好先進行一些簡單的測試,以確保能正常工作。
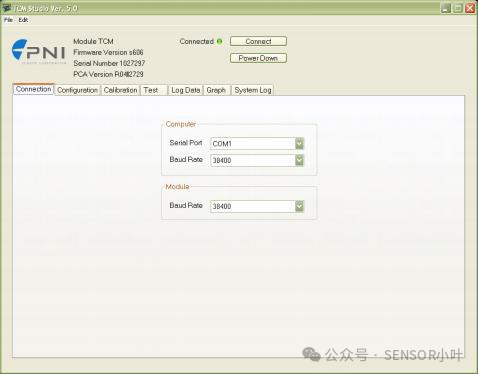
第二步:軟件調(diào)試
TCM Studio在TCM使用的二進制命令語言上放置了一個易于使用的圖形用戶界面(GUI)。TCM Studio旨在評估、演示和校準TCM模塊。該程序包括記錄和保存輸出文件的能力。TCM Studio評估軟件通過計算機的RS232串口與TCM進行通信。TCM Studio是一個可執(zhí)行程序,可以聯(lián)系工程師獲取軟件包。
第三步:選擇安裝位置
TCM是根據(jù)安裝孔進行因素校準的。它必須與主機系統(tǒng)中的這些安裝孔對齊。確保用于安裝模塊的任何支架或螺釘都是非磁性的。TCM可以按不同的方向安裝,如圖所示:所有參考點均基于電路板頂部的白色絲印箭頭,定向應(yīng)使用TCM Studio配置進行編程,默認方向為“STD0°”。
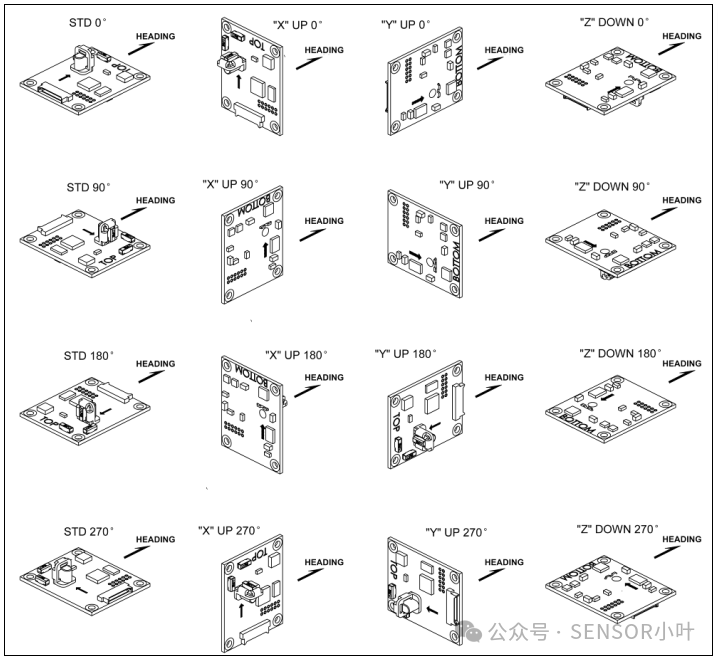
注意:TCMXB,Z軸傳感器和連接器位于模塊的頂面上。
安裝TCM時應(yīng)該考慮以下注意事項:
在TCM的動態(tài)范圍內(nèi)進行操作
定位,遠離不斷變化的磁場
安裝在穩(wěn)定的位置
位置驗證測試確定現(xiàn)場失真的距離,確定磁場在導(dǎo)通的動態(tài)范圍內(nèi)。
安裝指南針后,盡可能在多個位置旋轉(zhuǎn)和傾斜系統(tǒng)。在此過程中,監(jiān)測磁強計的輸出,觀察是否超過了最大線性范圍。
第四步:用戶校準
TCM需要安裝在主機系統(tǒng)中,而在用戶校準過程中,整個主機系統(tǒng)需要作為單個單元進行移動。TCM允許用戶僅在2D平面或有限的傾斜度下進行校準,但如果用戶可以旋轉(zhuǎn)360°的航向和至少±45°的傾斜度,則提供最大的精度。
在繼續(xù)進行校準之前,請確保TCM已正確安裝在主機系統(tǒng)中。此外,軟件應(yīng)在主題方向、方位、北參考等方面正確配置。
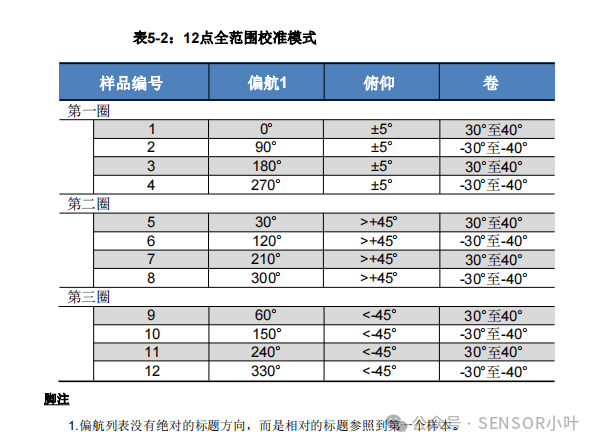
12點校準法
當(dāng)TCM可以傾斜土45°或更多時,全范圍校準是合適的。該方法補償了三維硬鐵和軟鐵的影響,并允許獲得最高精度的讀數(shù)。推薦的12點校準模式是一系列3個圓點均勻分布的圓點,如下表所示,校準的第二圈和第三圈中使用的間距應(yīng)至少與設(shè)備在使用中遇到的最大和最小間距相匹配。
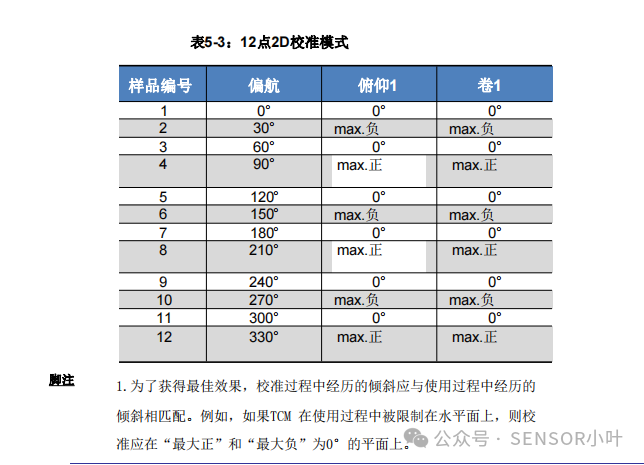
2D校準法
2D校準可用于非常低的傾斜操作(<5)。更大的傾斜度校準TCM是不實用的。該程序僅是校準二維的硬鐵和軟鐵效應(yīng),通常在傾斜-5范圍內(nèi)對操作和校準有效。12點校準模式是一個均勻間隔點,
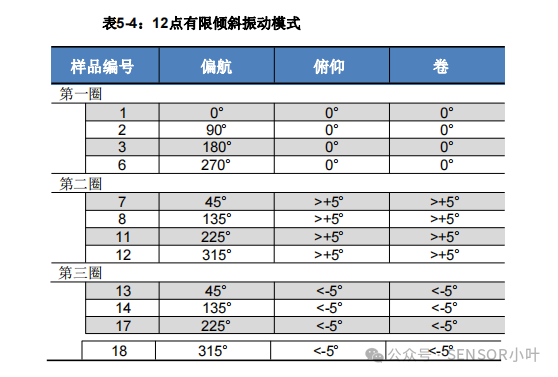
有限的傾斜范圍校準
當(dāng)45°時,建議進行有限傾斜范圍校準。但>5°的傾斜是可能的,它提供了硬鐵和軟鐵扭曲校正。下面給出的推薦的12點校準模式是3個均勻間隔點,在使用過程中傾斜變化與預(yù)期的相同。
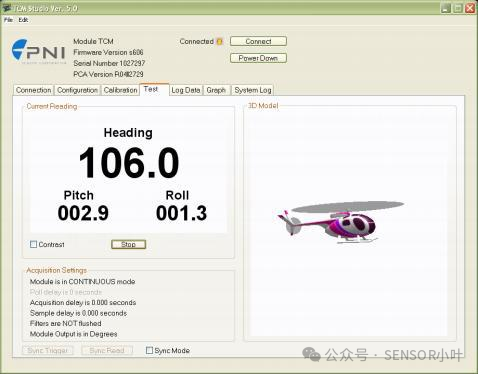
加速度計校準
TCM使用MEMS加速度計來測量羅盤的方向。這些數(shù)據(jù)以俯仰和滾轉(zhuǎn)數(shù)據(jù)的形式輸出。此外,當(dāng)TCM傾斜時,加速度計數(shù)據(jù)對于建立準確的航向讀數(shù)至關(guān)重要,如PNI的白皮書“2軸羅盤中的傾斜引起的航向誤差”中所討論的,可以在PNI的網(wǎng)站上找到.
PNI在發(fā)貨前會在工廠校準加速度計,但隨著時間的推移,加速度計的偏差和偏移會飄移。出于這個原因,PNI建議每6到12個月重新校準一次加速度計。
-
測試
+關(guān)注
關(guān)注
8文章
5675瀏覽量
128639 -
電子羅盤
+關(guān)注
關(guān)注
1文章
123瀏覽量
23756 -
TCM
+關(guān)注
關(guān)注
0文章
37瀏覽量
13055
發(fā)布評論請先 登錄
傳感器對消防有多重要
請問參與競標時應(yīng)該做什么類型的簡要說明?
熔絲位簡要說明
Socket API簡要說明
接口技術(shù)-USB驅(qū)動程序簡要說明及應(yīng)用例子
電子羅盤的工作原理及校準
一文讀懂電子羅盤的原理、校準和應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論