") VCU驅(qū)動(dòng)行駛功能策略
VCU驅(qū)動(dòng)行駛功能策略
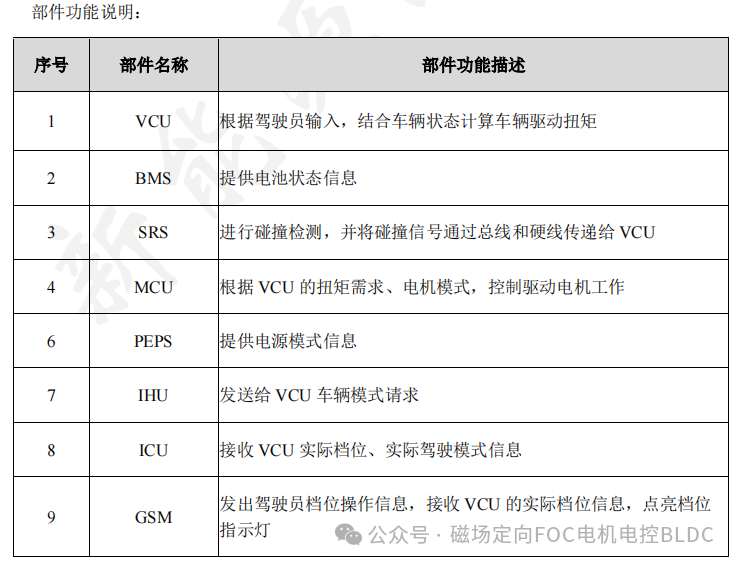
1、功能概述
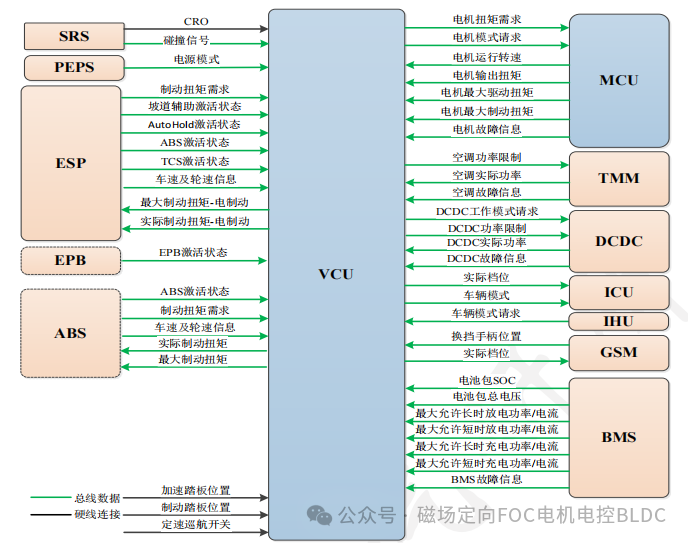
整車Ready狀態(tài),VCU根據(jù)駕駛員輸入信息(加速踏板、制動(dòng)踏板、檔位、駕駛模式),結(jié)合車輛狀態(tài)信息(車速、電池SOC、電池最大放電電流、電池最大充電電流、電機(jī)最大輸出扭矩),計(jì)算車輛驅(qū)動(dòng)扭矩需求,發(fā)送扭矩需求和電機(jī)模式請求給MCU,MCU控制驅(qū)動(dòng)電機(jī)輸出車輛驅(qū)動(dòng)行駛所需扭矩
1.1系統(tǒng)組成
2、功能描述
2.1、Ready模式
2.2、Ready模式進(jìn)入退出
Ready模式進(jìn)入條件:
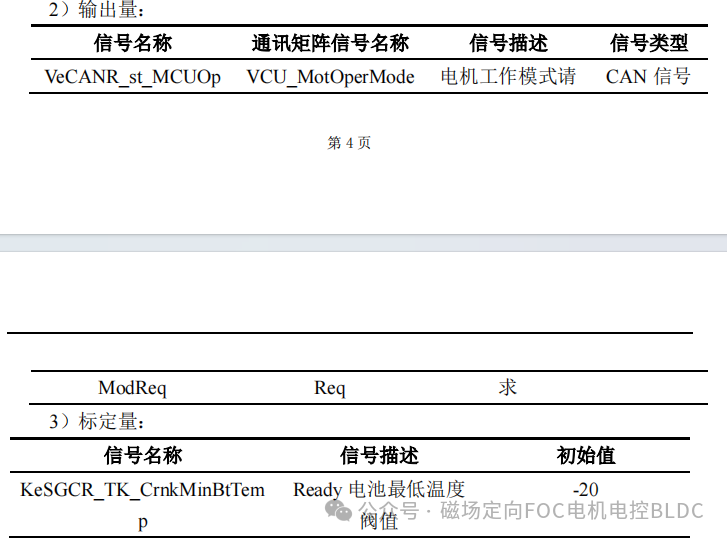
當(dāng)且只當(dāng)Peps處于ON檔或者Peps直接有Start請求的情況下,高壓上電完成后,以下條件都滿足,則動(dòng)力系統(tǒng)進(jìn)入可行駛模式,VCU向MCU發(fā)出VeCANR_st_MCUOpModReq模式請求為扭矩模式或轉(zhuǎn)速模式,MCU響應(yīng)VCU的扭矩請求或轉(zhuǎn)速請求:
?行駛模式高壓上電完成;
?Peps Start信號VeSGFR_b_KeyStrt為True;
?檔位器檔位位置VeCANR_st_GSMGrDsr為P/N檔;
?充電槍連接狀態(tài)VeCANR_b_BatChrgConn為“0”;
?電池包溫度高于標(biāo)定閥值KeSGCR_TK_CrnkMinBtTemp;
?系統(tǒng)無三級故障。
Ready模式退出條件:
以下條件有任意一個(gè)滿足,則動(dòng)力系統(tǒng)退出可行駛模式:
?檢測到充電槍連接狀態(tài)VeCANR_b_BatChrgConn不為“0”;
?系統(tǒng)有三級故障;
?Peps電源信號為Off檔;
2.3加速踏板及制動(dòng)踏板處理
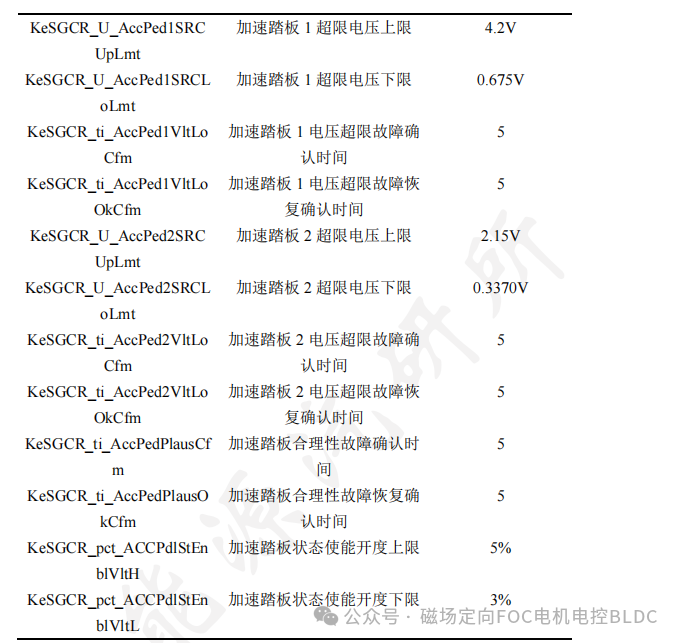
2.4、加速踏板
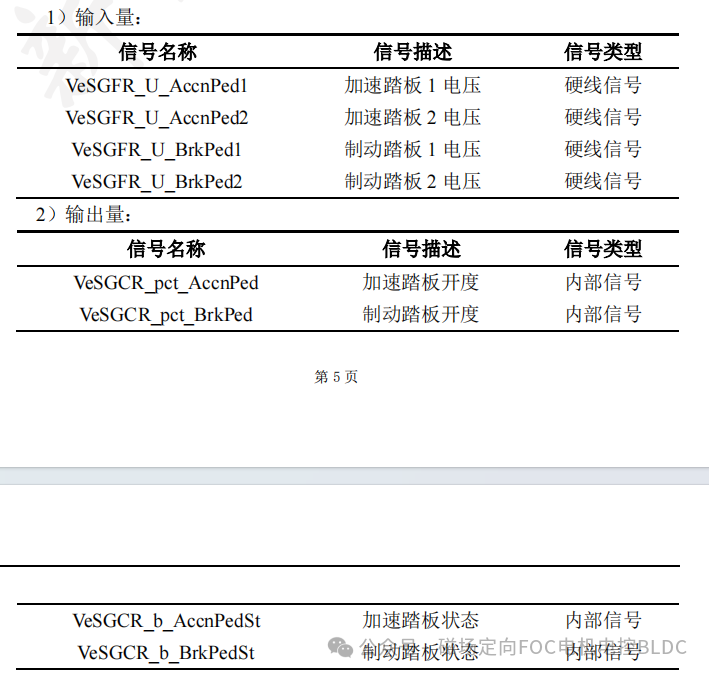
加速踏板應(yīng)在兩個(gè)相同方向安裝開度傳感器,與VCU的采集電路共同組成兩個(gè)分壓電路。加速踏板位置變化時(shí),其采集電壓應(yīng)同時(shí)增加或減小。VCU采集 兩 個(gè) 分 壓 電 路 的 電 壓 值 ,U1應(yīng)該是U2的兩倍關(guān)系。
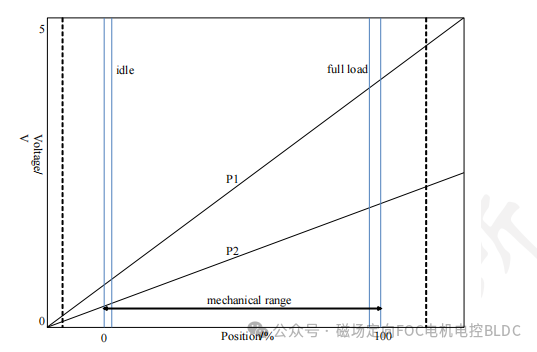
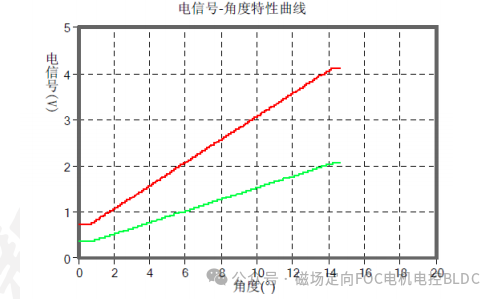
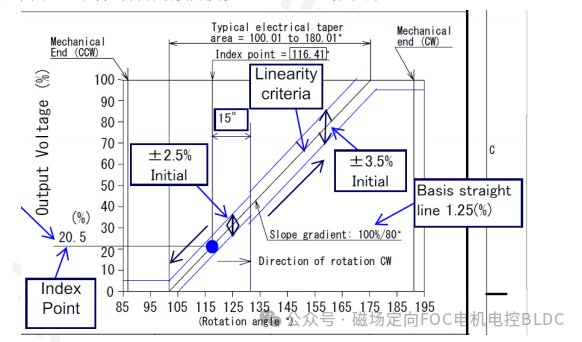
VCU根據(jù)加速踏板電壓信號和加速踏板傳感器電壓和開度的關(guān)系曲線,如
下圖,將采集得到的電壓信號轉(zhuǎn)換為加速踏板開度(0~100%)。
VCU輔MCU應(yīng)同時(shí)采集兩路油門電壓信號,并通過SPI反饋至主MCU,主MCU將采集到的兩路油門信號與輔MCU發(fā)送的電壓信號分別取小后,再進(jìn)行開度轉(zhuǎn)換。
VCU對加速踏板電壓信號和開度進(jìn)行濾波處理,在保證踏板反應(yīng)靈敏度的
前提下,濾除雜波及噪音干擾。VCU應(yīng)對加速踏板位置傳感器進(jìn)行診斷,包括電壓信號超范圍(最大、最小故障),兩路電壓信號合理性故障(信號偏差超范圍)。當(dāng)其中一路電壓信號超限時(shí),或者兩路電壓信號都超限時(shí),應(yīng)默認(rèn)開度為0;當(dāng)兩路合理性故障時(shí),可采用開度較小的一路作為輸出。VCU應(yīng) 對 加 速 踏 板 狀 態(tài) 進(jìn) 行 計(jì) 算 , 當(dāng) 加 速 踏 板 開 度 大 于(KeSGCR_pct_ACCPdlStEnblVltH,初始值5%),加速踏板狀態(tài)踩下;當(dāng)加速踏板開度小于(KeSGCR_pct_ACCPdlStEnblVltL,初始值3%),加速踏板狀態(tài)未踩下;KeSGCR_pct_ACCPdlStEnblVltH-KeSGCR_pct_ACCPdlStEnblVltL為遲滯區(qū)間。
2.5、制動(dòng)踏板
制動(dòng)踏板應(yīng)在兩個(gè)相同方向安裝開度傳感器,與VCU的采集電路共同組成兩個(gè)分壓電路。制動(dòng)踏板位置變化時(shí),其采集電壓應(yīng)同時(shí)增加或減小。
VCU輔MCU應(yīng)同時(shí)采集剎車電壓信號,并通過SPI反饋至主MCU,主
MCU將采集到的剎車電壓信號與輔MCU發(fā)送的電壓信號取大值后,進(jìn)行開度
轉(zhuǎn)換。VCU根據(jù)采集的制動(dòng)踏板電壓信號,和制動(dòng)踏板傳感器電壓與開度的曲線,如下圖,查表得到制動(dòng)踏板開度值(0-100%,線性關(guān)系)。
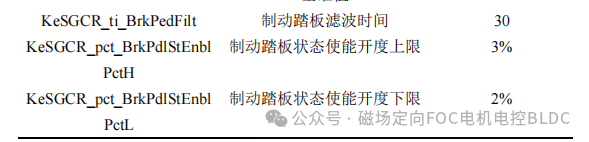
VCU對制動(dòng)踏板電壓信號和開度進(jìn)行濾波處理,在保證踏板反應(yīng)靈敏度的
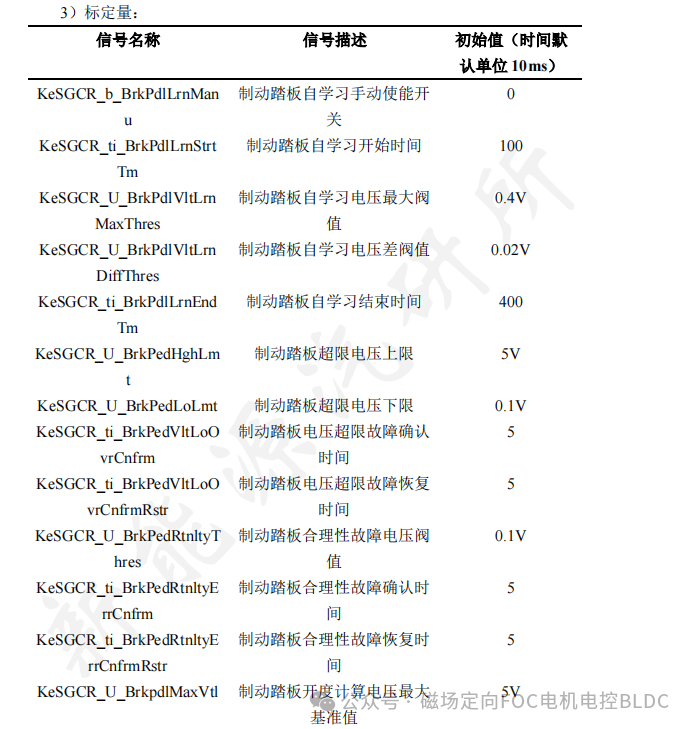
前提下,濾除雜波及噪音干擾。VCU應(yīng)對制動(dòng)踏板位置傳感器進(jìn)行診斷,包括電壓信號超范圍(最大、最小故障),兩路電壓信號合理性故障(信號偏差超范圍)。當(dāng)其中一路電壓信號超限時(shí),應(yīng)采用制動(dòng)開度100%;當(dāng)兩路電壓信號都超限時(shí),應(yīng)默認(rèn)開度為100%;當(dāng)兩路合理性故障時(shí),可采用開度較大的一路作為輸出,其中合理性故障判斷方式為:兩路踏板電壓差值的絕對值除以兩路踏板電壓的和的比例不大于某一百分比(初始值為5%)。VCU應(yīng) 對 制 動(dòng) 踏 板 狀 態(tài) 進(jìn) 行 計(jì) 算 , 當(dāng) 制 動(dòng) 踏 板 開 度 大 于
(KeSGCR_pct_BrkPdlStEnblPctH,初始值3%),制動(dòng)踏板踩下;當(dāng)制動(dòng)踏板開度小于(KeSGCR_pct_BrkPdlStEnblPctLL,初始值2%),制動(dòng)踏板狀態(tài)未踩下;KeSGCR_pct_BrkPdlStEnblPctH- KeSGCR_pct_BrkPdlStEnblPctL為遲滯區(qū)間。
2.6、制動(dòng)優(yōu)先
當(dāng)VCU檢測到制動(dòng)踏板狀態(tài)信號VeSGCR_b_BrkPedSt和加速踏板狀態(tài)信號VeSGCR_b_AccnPedSt同時(shí)為Ture時(shí),即駕駛員同時(shí)踩下制動(dòng)踏板和加速踏板時(shí),始終優(yōu)先保證制動(dòng)功能,以制動(dòng)優(yōu)先,VCU應(yīng)控制整車行駛模式進(jìn)入制動(dòng)模式,退出驅(qū)動(dòng)扭矩控制進(jìn)入制動(dòng)能量回收扭矩控制。
2.7驅(qū)動(dòng)扭矩控制
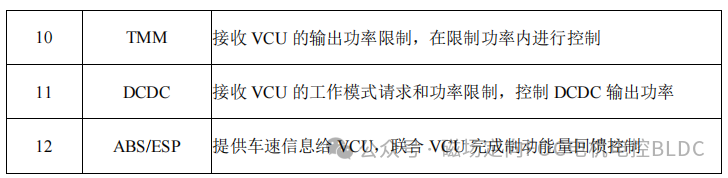
1)輸入量:
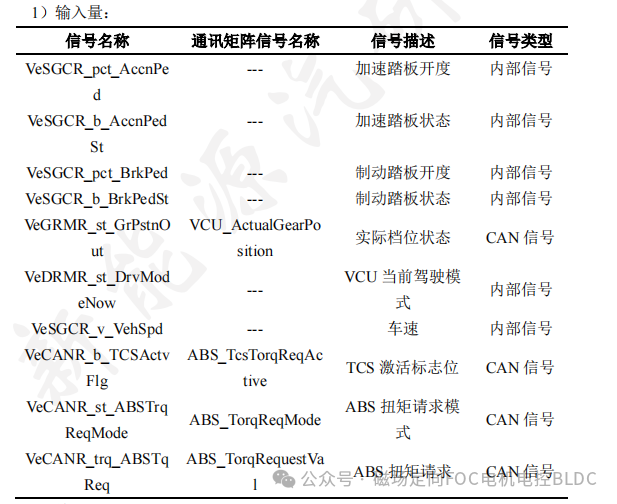


2.71驅(qū)動(dòng)模式進(jìn)入退出
驅(qū)動(dòng)模式進(jìn)入條件:
當(dāng)且只當(dāng)Peps處于ON檔情況下,車輛高壓上電完成,同時(shí)滿足下列條件,車輛進(jìn)入驅(qū)動(dòng)模式:
?車輛處于Ready模式;
?檔位處于D/R檔;
?加速踏板踩下;
?制動(dòng)踏板未踩下;
?定速巡航未激活;
?系統(tǒng)無三級故障;
驅(qū)動(dòng)模式退出條件:
當(dāng)車輛高壓上電完成,如果滿足下列任一條件,車輛將退出驅(qū)動(dòng)模式:
?車輛退出Ready模式;
?檔位處于P/N檔;
?加速踏板松開;
?制動(dòng)踏板踩下;
?定速巡航功能激活且巡航需求扭矩大于加速踏板需求扭矩
?系統(tǒng)有三級故障;
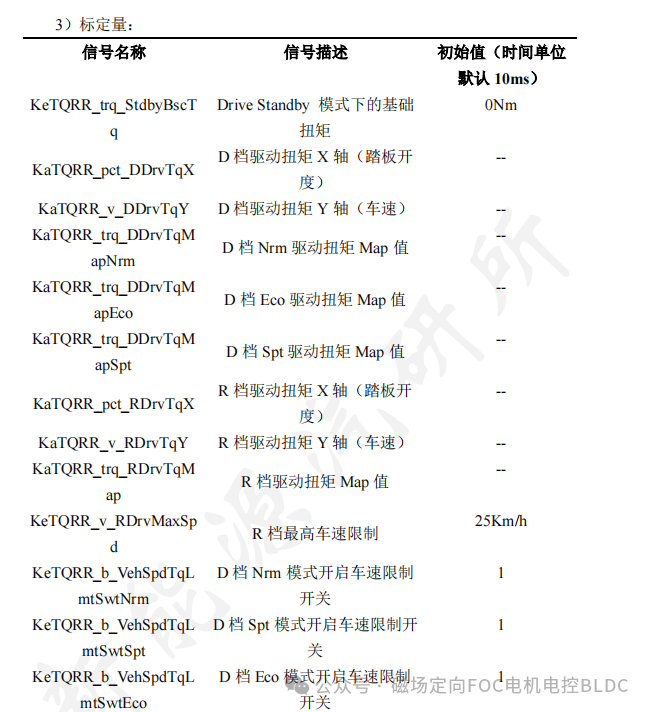
2.72駕駛員需求扭矩
在D檔下,在不同車輛模式下,VCU查不同踏板-車速二維表(根據(jù)不同車輛模式對動(dòng)力性的要求)得到駕駛員需求扭矩;在R檔下,VCU同樣對踏板-車速進(jìn)行二維查表。
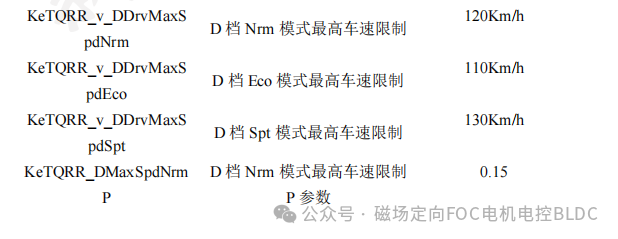
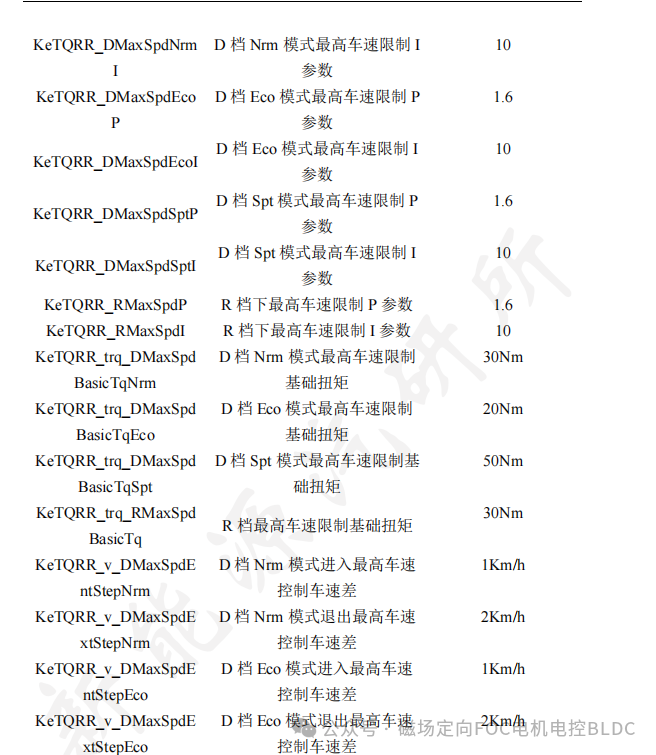
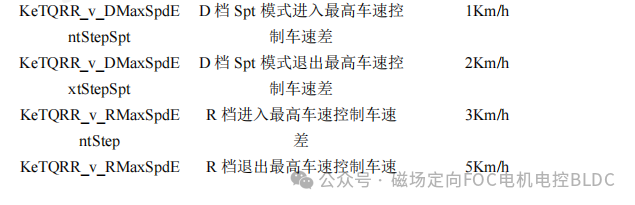
2.73車速及功率限制
在D檔下,VCU對驅(qū)動(dòng)扭矩通過最高車速進(jìn)行限制,不同車輛模式下設(shè)置不同限制值(TBD標(biāo)定值,ECO初始值為110Km/h,Nrm初始值為120Km/h,Sprt初始值為130Km/h);而R檔下,VCU只需要設(shè)置一個(gè)最高車速限制值(TBD標(biāo)定值,初始值為25Km/h)。在能量管理模塊,VCU依據(jù)不同車輛模式對動(dòng)力性舒適性的需求,計(jì)算電機(jī)最大可用功率(具體見能量管理功能規(guī)范),進(jìn)而計(jì)算出不同的功率扭矩限制。
2.74、底盤扭矩干預(yù)
當(dāng)ABS/ESP增減扭標(biāo)志位激活時(shí),且ABS/ESP請求扭矩有效時(shí),VCU采
用ABS/ESP發(fā)送的請求扭矩。當(dāng)定速巡航功能激活時(shí),VCU切換到定速巡航模式,采用定速巡航模塊計(jì)算的需求扭矩(具體見定速巡航功能規(guī)范)。
當(dāng)ACC功能激活時(shí),VCU切換到響應(yīng)ACC的扭矩請求(具體見自適應(yīng)巡
航功能規(guī)范);當(dāng)APS激活功能激活時(shí)候,VCU根據(jù)APS的加速度請求,計(jì)算整車行駛需求扭矩,滿足APS的期望行駛需求(具體見自動(dòng)泊車功能規(guī)范)。
2.75扭矩濾波
VCU在最終輸出電機(jī)驅(qū)動(dòng)扭矩需求前,根據(jù)車輛駕駛平順性,對驅(qū)動(dòng)扭矩
進(jìn)行濾波處理。在不同的駕駛工況下(Tipin/Tipout/過零)設(shè)置濾波標(biāo)志位和濾波值,在實(shí)車標(biāo)定中優(yōu)化參數(shù)保證在滿足加速性能的前提下,盡量避免抖動(dòng)或滑行時(shí)扭矩變化過大的現(xiàn)象.
來源:磁場定向FOC電機(jī)電控BLDC
-
mcu
+關(guān)注
關(guān)注
146文章
17877瀏覽量
361370 -
驅(qū)動(dòng)電機(jī)
+關(guān)注
關(guān)注
9文章
424瀏覽量
31220 -
電池
+關(guān)注
關(guān)注
84文章
11011瀏覽量
134215 -
VCU
+關(guān)注
關(guān)注
17文章
83瀏覽量
20967
原文標(biāo)題:VCU驅(qū)動(dòng)行駛功能策略
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
整車控制器VCU基于模型開發(fā)
整車控制器VCU EOL 測試系統(tǒng)
串聯(lián)式混合動(dòng)力汽車恒溫器/功率跟隨控制策略相關(guān)資料下載
整車VCU技術(shù)和開發(fā)流程剖析VCU
VCU(整車控制器)簡介
VCU功能測試需求
自動(dòng)駕駛線控底盤VCU功能介紹
電機(jī)控制器的定義及功能詳解
VCU信號的類型和VCU信號的應(yīng)用

Virtex UltraScale FPGA VCU108評估套件的功能介紹
新能源汽車電控系統(tǒng)VCU策略的開發(fā)以及匹配標(biāo)定
新能源汽車電動(dòng)化VCU控制器系統(tǒng)功能分類和概覽







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論