") 深度解析PID
深度解析PID
很多同學(xué)都不清楚PID是個什么東西,因為很多不是自動化的學(xué)生。他們開口就要資料,要程序。這是明顯的學(xué)習(xí)方法不對,起碼,首先,你要理解PID是個什么東西。
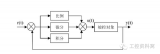
首先,為什么要做PID?
由于外界原因,小車的實際速度有時不穩(wěn)定,這是其一,要讓小車以最快的時間達達到既定的目標速度,這是其二。速度控制系統(tǒng)是閉環(huán),才能滿足整個系統(tǒng)的穩(wěn)定要求,必竟速度是系統(tǒng)參數(shù)之一,這是其三.小車調(diào)速肯定不是線性的,外界因素那么多,沒人能證明是線性的。如果是線性的,直接用P就可以了。比如在PWM=60%時,速度是2M/S,那么你要它3M/S,就把PWM提高到90%。因為90/60=3/2,這樣一來太完美了。完美是不可能的。那么不是線性的,要怎么怎么控制PWM使速度達到即定的速度呢?即要快,又要準,又要狠。(即快準狠)系統(tǒng)這個速度的調(diào)整過程就必須通過某個算法調(diào)整,一般PID就是這個所用的算法。可能你會想到,如果通過編碼器測得現(xiàn)在的速度是2.0m/s,要達到2.3m/s的速度,那么我把pwm增大一點不就行了嗎?是的,增大pwm多少呢?必須要通過算法,因為PWM和速度是個什么關(guān)系,對于整個系統(tǒng)來說,誰也不知道。要一點一點的試,加個1%,不夠,再加1%還是不夠,那么第三次你還會加1%嗎?很有可能就加2%了。通過PID三個參數(shù)得到一個表達式:△PWM=a *△V1+b *△V2+c *△V3,a b c是通過PID的那個長長的公式展開,然后約簡后的數(shù)字,△V1 ,△V2 ,△V3 此前第一次調(diào)整后的速度差 ,第二次調(diào)整后的速度差,第三次。。。。。一句話,PID要使當(dāng)前速度達到目標速度最快,需要建立如何調(diào)整pwm和速度之間的關(guān)系。
輸入輸出是什么輸入就是前次速度,前前次速度,前前前次速度。輸出就是你的PWM應(yīng)該增加或減小多少。
控制模型:你控制一個人讓他以PID控制的方式走110步后停下。
(1)P比例控制,就是讓他走110步,他按照一定的步伐走到一百零幾步(如108步)或100多步(如112步)就停了。
說明P比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關(guān)系。當(dāng)僅有比例控制時系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
(2)PI積分控制,就是他按照一定的步伐走到112步然后回頭接著走,走到108步位置時,然后又回頭向110步位置走。在110步位置處來回晃幾次,最后停在110步的位置。
說明在積分I控制中,控制器的輸出與輸入誤差信號的積分成正比關(guān)系。對一個自動控制系統(tǒng),如果在進入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡稱有差系統(tǒng)(System with Steady-state Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項”。積分項對誤差取決于時間的積分,隨著時間的增加,積分項會增大。這樣,即便誤差很小,積分項也會隨著時間的增加而加大,它推動控制器的輸出增大使穩(wěn)態(tài)誤差進一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進入穩(wěn)態(tài)后無穩(wěn)態(tài)誤差。
(3)PD微分控制,就是他按照一定的步伐走到一百零幾步后,再慢慢地向110步的位置靠近,如果最后能精確停在110步的位置,就是無靜差控制;如果停在110步附近(如109步或111步位置),就是有靜差控制。
說明在微分控制D中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關(guān)系。自動控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會出現(xiàn)振蕩甚至失穩(wěn),其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后(delay)組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差作用的變化“超前”,即在誤差接近零時,抑制誤差的作用就應(yīng)該是零。這就是說,在控制器中僅引入“比例P”項往往是不夠的,比例項的作用僅是放大誤差的幅值,而目前需要增加的是“微分項”,它能預(yù)測誤差變化的趨勢。這樣,具有比例+微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負值,從而避免了被控量的嚴重超調(diào)。所以對有較大慣性或滯后的被控對象,比例P+微分D(PD)控制器能改善系統(tǒng)在調(diào)節(jié)過程中的動態(tài)特性。
-
PID
+關(guān)注
關(guān)注
37文章
1480瀏覽量
87602
原文標題:用大白話告訴你什么是PID
文章出處:【微信號:weixin21ic,微信公眾號:21ic電子網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
Zstack中串口操作的深度解析(一)
java經(jīng)典面試題深度解析
解析深度學(xué)習(xí):卷積神經(jīng)網(wǎng)絡(luò)原理與視覺實踐
功能安全---AUTOSAR架構(gòu)深度解析 精選資料分享
AUTOSAR架構(gòu)深度解析 精選資料推薦
AUTOSAR架構(gòu)深度解析 精選資料分享
C語言深度解析
深度解析PID調(diào)節(jié)經(jīng)驗
深度解析Asp.Net2.0中的Callback機制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論