 LabVIEW運動控制(一):EtherCAT運動控制器的SCARA機械手應用
LabVIEW運動控制(一):EtherCAT運動控制器的SCARA機械手應用

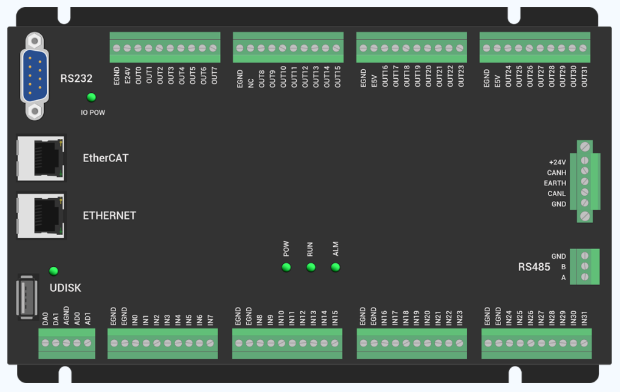
ZMC408CE 高性能總線型運動控制器
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應用于各種需要脫機或聯機運行的場合。

ZMC408CE支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE硬件功能特性:
1.支持8軸運動控制(脈沖+EtherCAT總線),EtherCAT同步周期可快至125us;
2.24路通用輸入、16路通用輸出,模擬量AD/DA各兩路;
3.8路10MHz高速差分脈沖輸出,總線軸、脈沖軸可混合插補;
4.高性能處理器,提升運算速度、響應時間和掃描周期等;
5.一維/二維/三維、多通道視覺飛拍,高速高精;
6.位置同步輸出PSO,連續軌跡加工中對精密點膠膠量控制和激光能量控制等;
7.多軸同步控制,多坐標系獨立控制等;
8.直線插補、任意空間圓弧插補、螺旋插補、樣條插補等;
9.應用靈活,可PC上位機開發,也可脫機獨立運行;
ZMC408CE視頻介紹可點擊→“高性能EtherCAT總線運動控制器,帶你玩轉“8通道獨立PSO”應用場景”查看。
更多關于ZMC408CE的詳情介紹,點擊“推薦|8通道PSO的高性能EtherCAT總線運動控制器”查看。
PCIE464M PCIe EtherCAT總線運動控制卡
PCIE464M是一款基于PCIe的PCI Express的EtherCAT總線運動控制卡,具有多項實時和高精度運動控制控制功能。
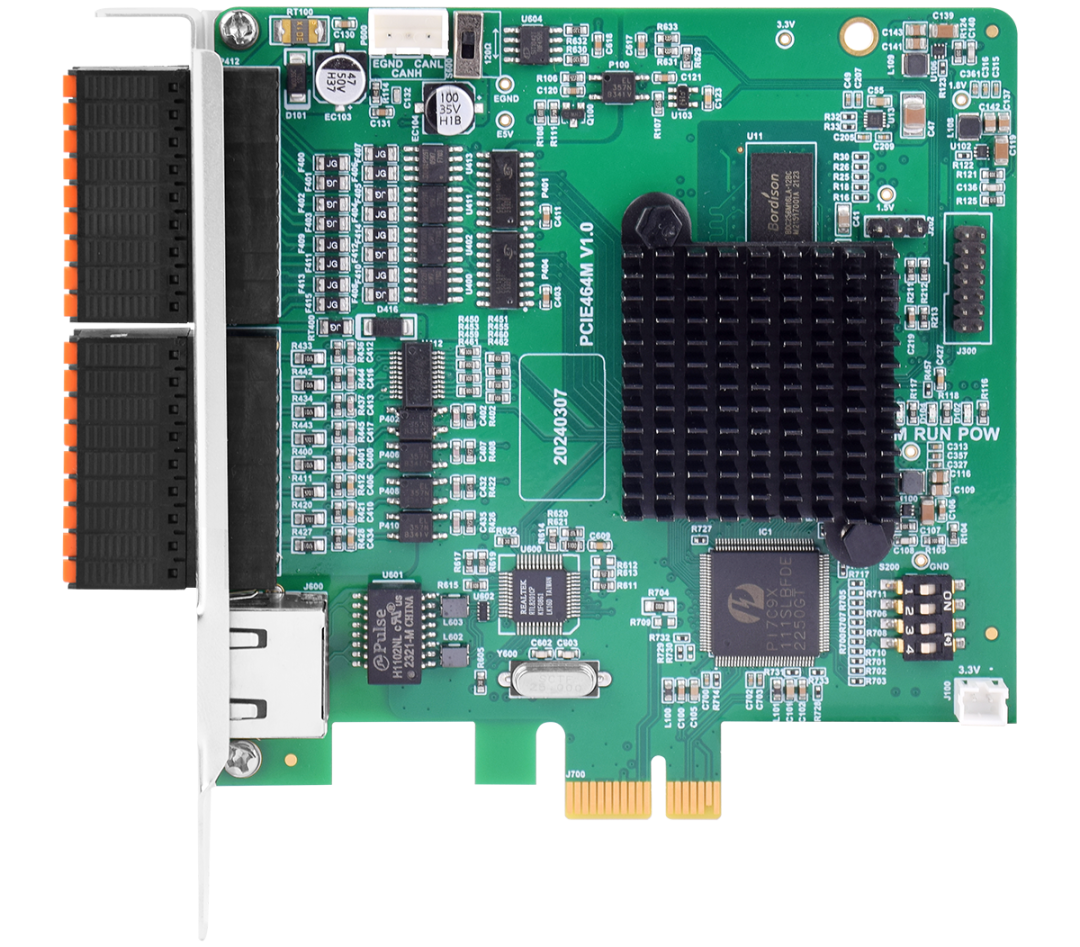
PCIE464M運動控制卡上自帶16進16出,第三方圖像處理工控機或PC無需額外配置IO數據采集卡和PLC,即可實現IPC形態的機器視覺運動控制一體機,簡化硬件架構,節省成本,軟硬件一體化。

PCIE464M硬件功能特性:
1.可選6-64軸運動控制,支持EtherCAT總線/脈沖/步進伺服驅動器;
2.聯動軸數最高可達16軸,運動周期最小為100μs;
3.標配16進16出,其中4路高速鎖存輸入、4路高速PWM和12路高速硬件比較輸出PSO;
4.支持PWM輸出、1D/2D/3D PSO硬件位置比較輸出、視覺飛拍、連續軌跡插補等;
5.支持30+機械手模型正逆解模型算法,比如SCARA、Delta、UVW、4軸/5軸 RTCP...;
6.支持掉電存儲和掉電中斷,多重加密,提供程序更安全機制;
7.8路單端脈沖軸、4路單端編碼器軸;
8.具有一維、二維螺距補償控制,實現更高的加工精度;
PCIE464M視頻介紹可點擊→“超高速PCle EtherCAT控制卡PCIE464M,即刻提升高速高精智能裝備生產力!”查看。
更多關于PCIE464M的詳情介紹,點擊“PCIE464M-高速高精,超高速PCIe EthrtCAT實時運動控制卡”查看。
ECI2A18B 高性價比10軸運動控制卡
ECI2A18B是正運動推出的一款高性價比10軸脈沖型、模塊化的網絡型運動控制卡,采用優化的網絡通訊協議可以實現實時的運動控制,同時支持多種通信協議,方便與其他工業控制設備連接和集成。安裝配置相對便捷,適合于模塊化和靈活性要求較高的控制系統。
ECI2A18B控制卡最大可擴展至12脈沖軸,支持8路高速輸入和4路高速輸出,集成豐富的運動控制功能,包含多軸點位運動、電子凸輪,直線插補,圓弧插補,連續插補運動等,滿足多樣化的工業應用需求。

ECI2A18B硬件功能特性:
1.支持6路差分脈沖軸+4路單端脈沖軸運動控制;
2.支持1路專用的手輪輸入接口;
3.差分脈沖軸最大輸出脈沖頻率10MHz;
4.標配24+12進16+6出,其中支持4路高速鎖存,4路高速PWM,2路高速硬件比較輸出PSO(可選支持HW2功能);
5.可支持RTSys+其他高級上位機編程語言的混合編程支持;
6.支持RTBasic多任務編程;

ECI2A18B視頻介紹可點擊→“【加量不加價】高性價比十軸脈沖運動控制卡ECI2A18B 讓您的設備在自動化行業內卷中脫穎而出!”查看。
更多關于ECI2A18B的詳情介紹,點擊“【加量不加價】正運動網絡型運動控制卡ECI2618B/ECI2A18B”查看。
??? LabVIEW進行運動控制開發
1.找到廠家提供的光盤資料里面的LabVIEW的VI庫文件,路徑如下。
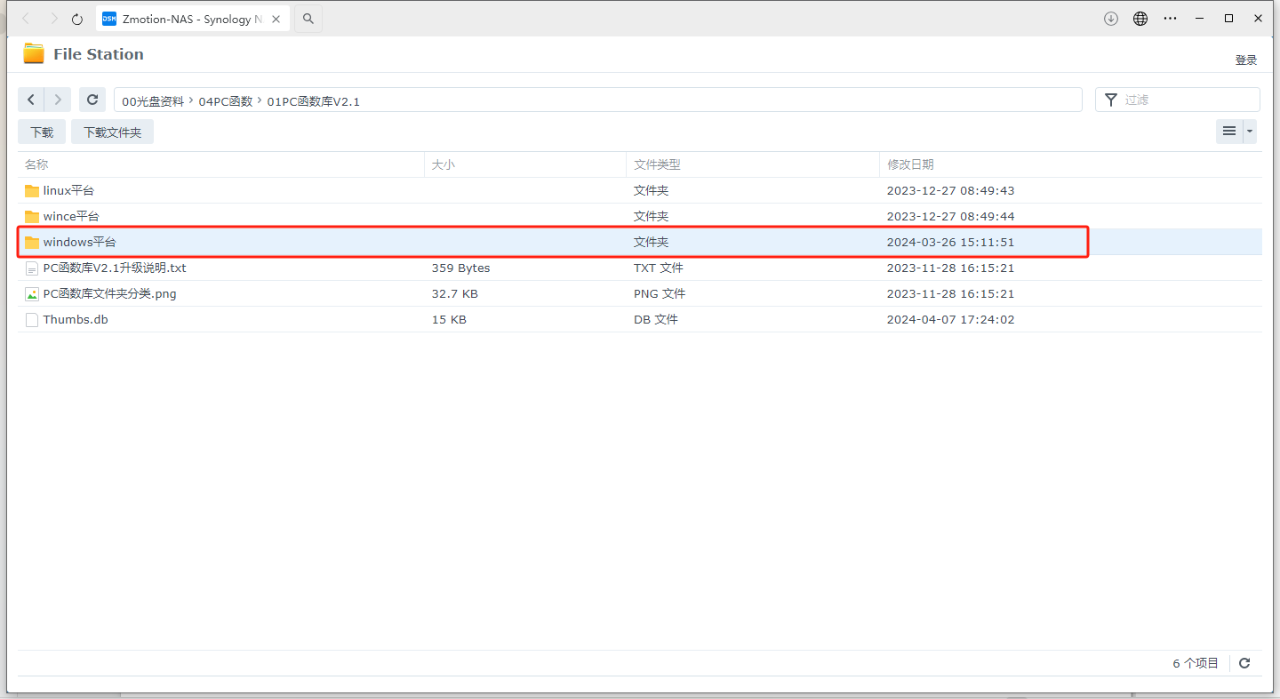
1)進入廠商提供的光盤資料找到“04PC函數”文件夾,并點擊進入。
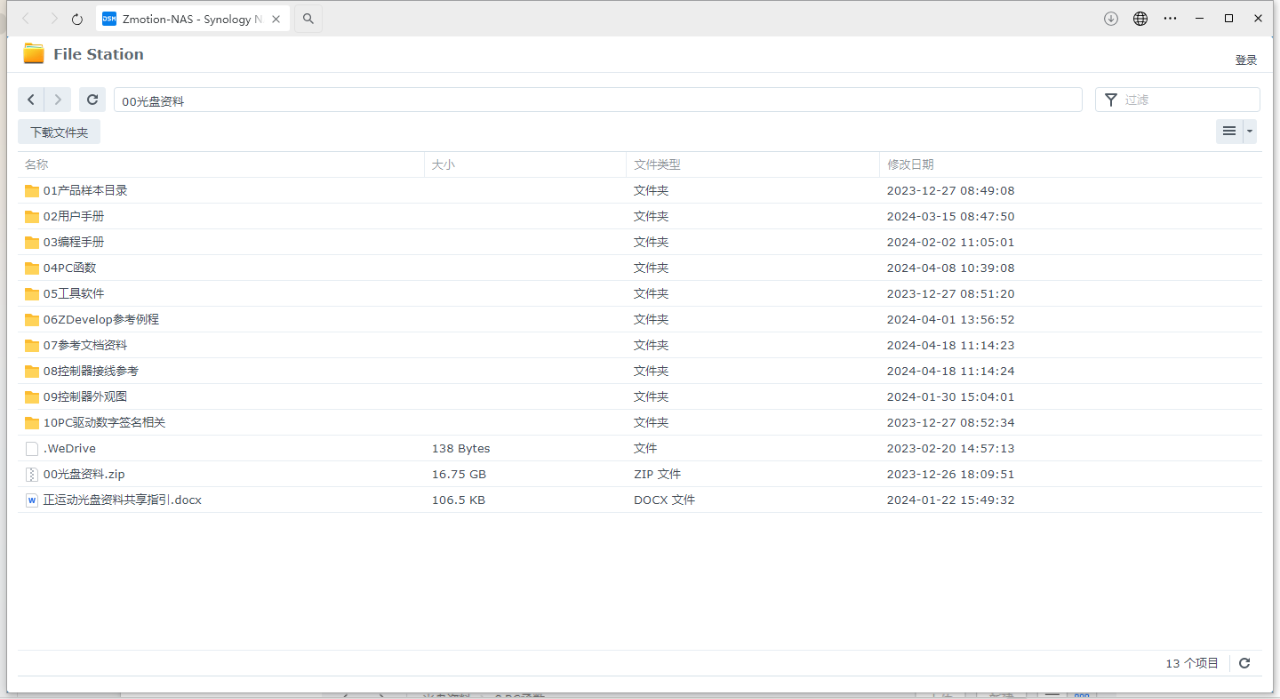
2)選擇“01 PC函數庫V2.1”文件夾。
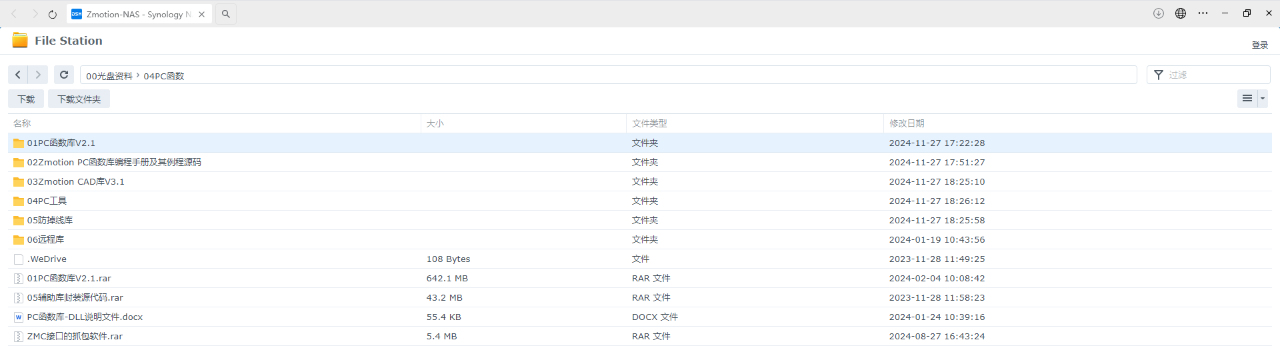
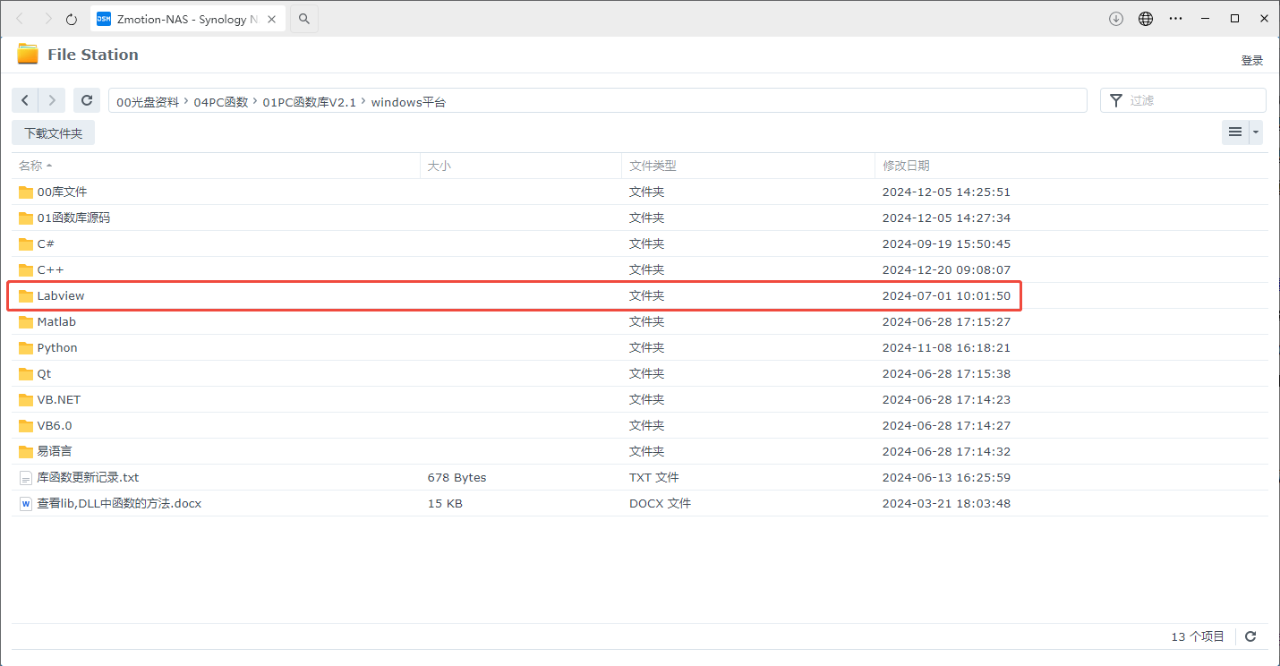
3)選擇“Windows平臺”文件夾。
4)選擇“LabVIEW文件夾”,里面有32位和64位的動態庫和例程。
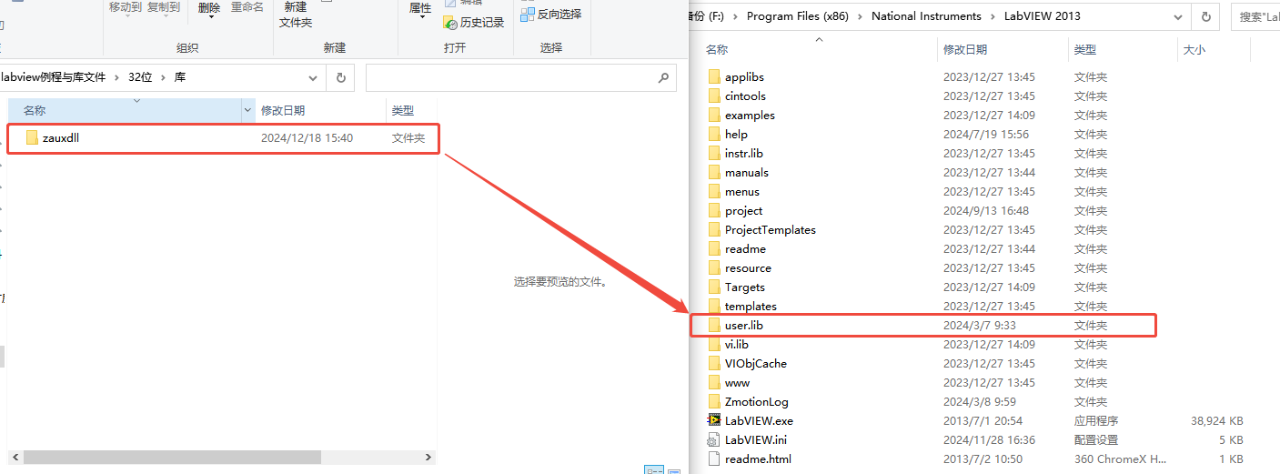
2.將廠商提供的LabVIEW的VI庫文件復制到LabVIEW安裝路徑下LabVIEW/user.lib的文件夾內。
1)找到解壓的VI庫文件夾(zaudll是32位的VI庫,64的VI庫是newZauxDll64)。


2)選中LabVIEW右擊打開文件所在位置(這里以LabVIEW2013-32位為演示)。
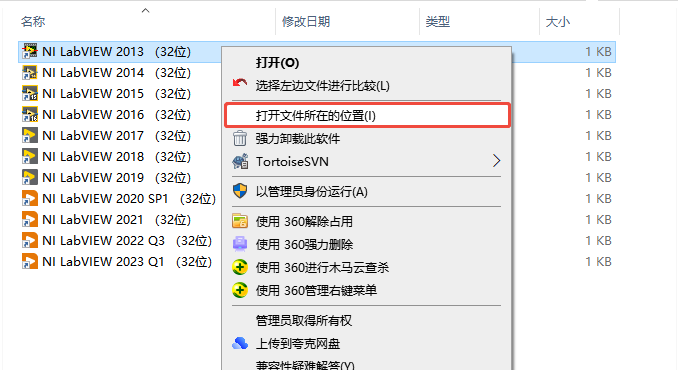
3)將整個VI庫文件夾直接復制放到user.lib該目錄,然后關閉LabVIEW軟件重新啟動。
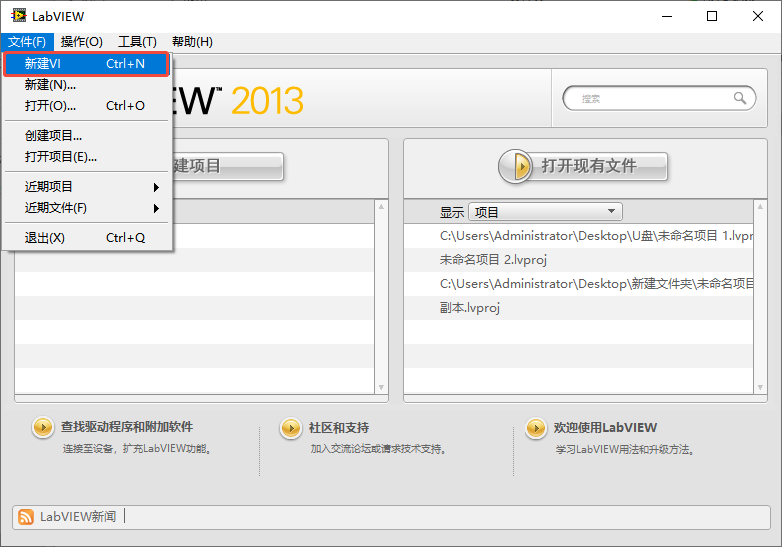
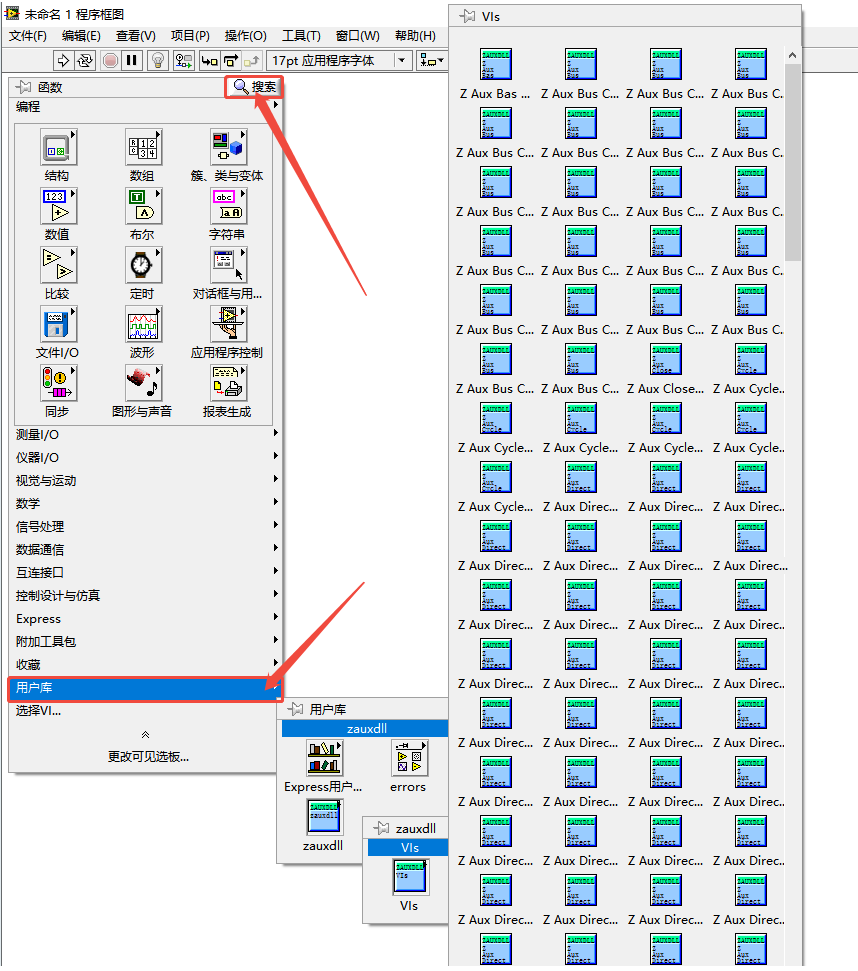
3.重新啟動LabVIEW后,選擇新建VI,然后右鍵點擊VI程序框圖空白處,選擇用戶庫來找到添加的VI庫,或者直接搜索VI,最后將需要的函數直接拖到面板上。
???例程相關函數說明
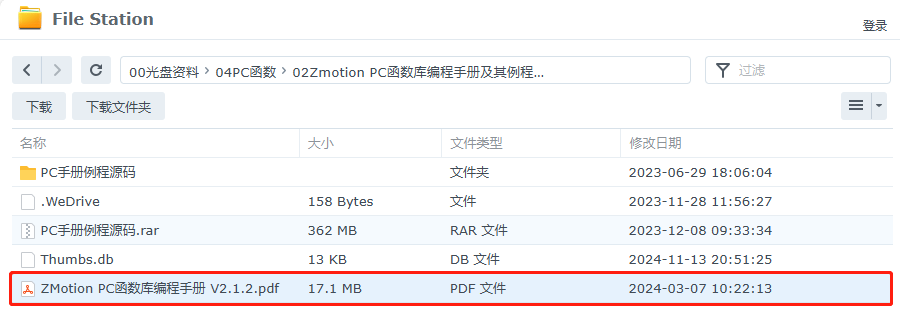
PC函數手冊可在光盤資料查看,具體路徑如下。

??? SCARA機械手說明
01SCARA機械手算法與原理
SCARA(Selective Compliance Assembly Robot Arm,中文譯名:選擇順應性裝配機器手臂)是一種圓柱坐標型的特殊類型的工業機器人。
SCARA機器人具有3個旋轉自由度和一個移動自由度,可以實現水平和垂直運動。可以被制造成各種大小,最常見的工作半徑在100毫米至1000毫米之間,此類的SCARA機器人的凈載重量在1千克至200千克之間。
SCARA系統在x,y方向上具有順從性,而在Z軸方向具有良好的剛度。其結構簡單、體積小、質量輕、動作迅速、剛性好及定位精度高。故SCARA系統大量用于裝配印刷電路板、電子零部件、集成電路板此外,塑料、汽車、電子產品、藥品和食品等工業領域也有廣泛的應用。

(1)空間中的自由度:
以標準SCARA為例,末端的工作點可以在xy方向移動(2 軸),可以繞z旋轉(3 軸),可以z方向上下(4 軸),最多有4個自由度。
(2)關節坐標系:
包含機械手所有關節,各關節之間相互獨立,坐標單位為角度,一般簡寫作J。操作其中一個關節時不影響其他關節坐標。J1:0° J2:0° J3:0° J4:0°
(3)世界坐標系:
世界坐標系是被固定在空間上的標準直角坐標系,其位置根據機械手類型確定。虛擬軸操作時就是根據世界坐標系運動,此時各關節會自動解算需要旋轉的角度。
(4)關節軸:
關節軸是指實際機械結構中的旋轉關節,在程序中一般顯示旋轉角度(某些結構也是平移軸)。由于電機與旋轉關節會存在減速比,所以設置UNITS時要按照實際關節旋轉一圈來設置,同時TABLE中填寫結構參數時也要按照旋轉關節中心計算,而不是按照電機軸中心計算。
(5)虛擬軸:
虛擬軸不是實際存在的,抽象為世界坐標系的6個自由度,依次為X、Y、Z、RX、RY、RZ。可以理解為直角坐標系的三個直線軸和三個旋轉軸,用來確定機械手末端工作點的加工軌跡與坐標。
(6)正解運動:
通過操作關節坐標,再根據機械結構參數可以計算出末端位置在直角坐標系的空間位置,這個過程稱為正解運動,此時操作的是實際關節軸,虛擬軸自動計算坐標。
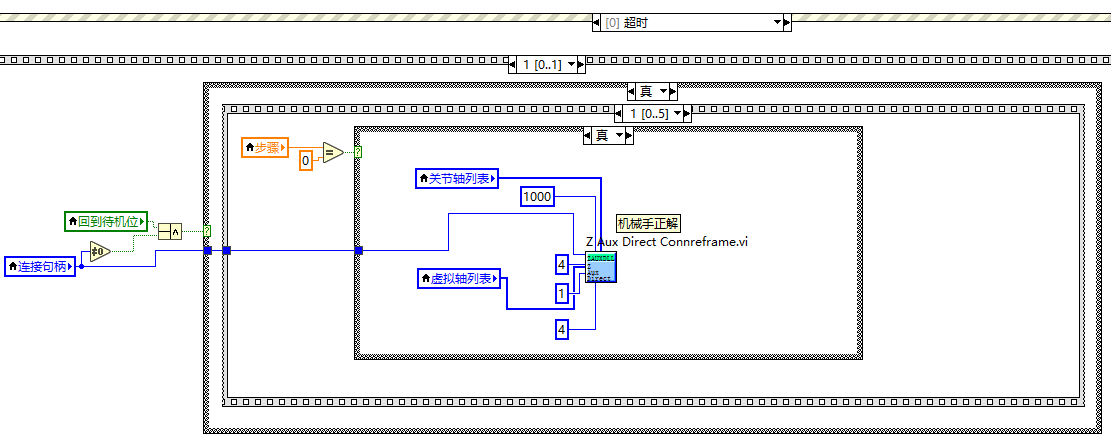
(7)控制器使用CONNREFRAME指令建立正解模式:
此指令作用在虛擬軸上,此時只能操作關節軸,關節軸也可以做各種運動,但實際運動的軌跡不是直線圓弧,正解模式一般用于手動調整關節位置或上電點位回零。
(8)逆解運動:
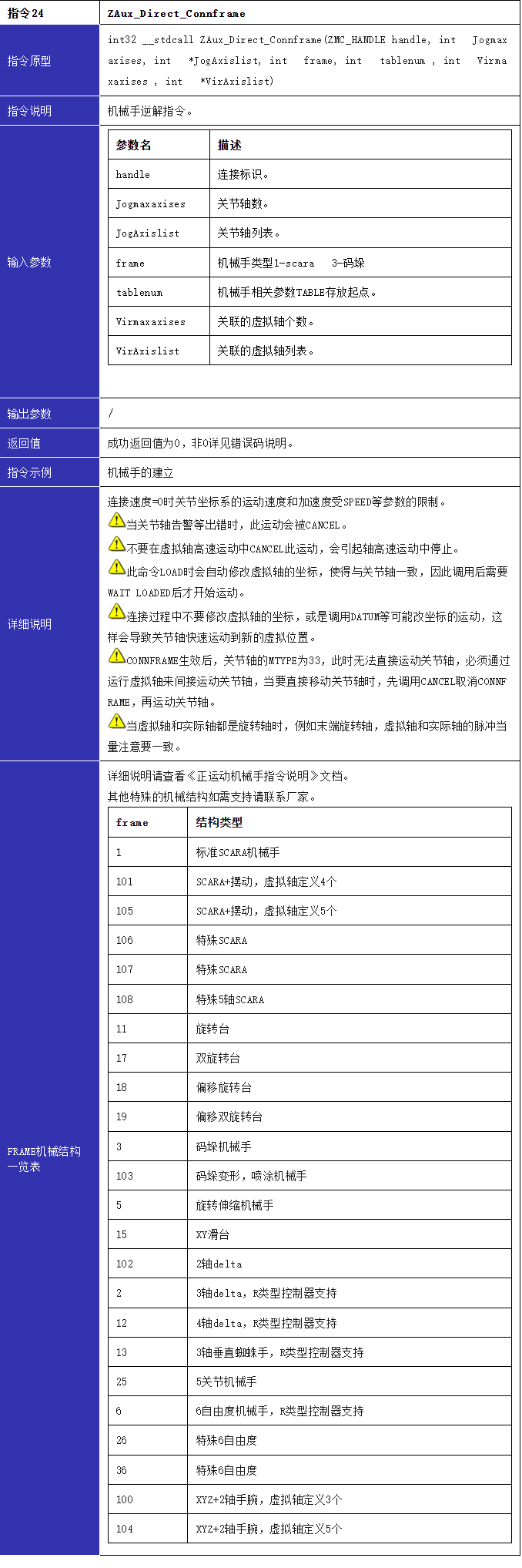
給定一個直角坐標系中的空間位置,反推出各關節軸坐標,這個過程稱為逆解運動,此時操作的是虛擬軸,實際關節軸自動解算坐標并運動。控制器使用CONNFRAME指令建立逆解模式,此指令作用在關節軸上,此時只能操作虛擬軸,對虛擬軸發送運動指令,可以在笛卡爾坐標系中做直線,圓弧,空間圓弧等運動,關節軸在CONNFRAME的作用下會自動運動到逆解后的位置。
02 機械手指令算法
1.CONNFRAME--建立逆解連接
描述:
將當前關節坐標系的目標位置與虛擬坐標系的位置關聯;關節坐標系的運動最大速度受SPEED參數的限制;當關節軸告警等出錯時,此運動會被CANCEL。
語法:
CONNFRAME(frame,tablenum,viraxis0,viraxis1)
frame:
坐標系類型,1-scara
tablenum:
存儲轉換參數的TABLE位置,frame=1時,以此存放:第一個關節軸長度,第二個關節軸長度,第一個關節軸一圈脈沖數,第二個關節軸一圈脈沖數。
viraxis0:
虛擬坐標系第一個軸
viraxis1:
虛擬坐標系第二個軸
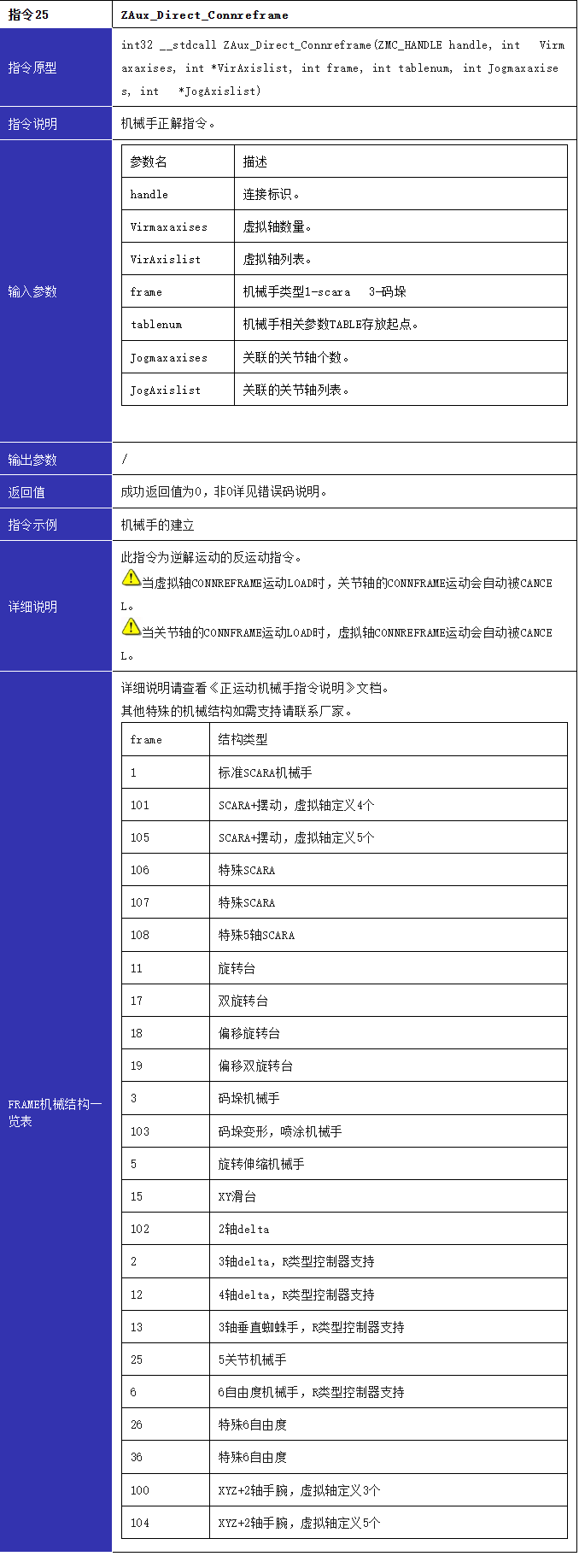
2.CONNREFRAME--建立正解連接
描述:
將虛擬軸的坐標與關節軸的坐標關聯,關節軸運動后,虛擬軸自動走到相應的位置。
語法:
CONNREFRAME(frame,tablenum,viraxis0,viraxis1)
frame:
坐標系類型, 1- scara
tablenum:
存儲轉換參數的TABLE位置,frame=1時,以此存放:第一個關節軸長度,第二個關節軸長度,第一個關節軸一圈脈沖數,第二個關節軸一圈脈沖數。
axis0:
關節坐標系第一個軸
axis1:
關節坐標系第二個軸
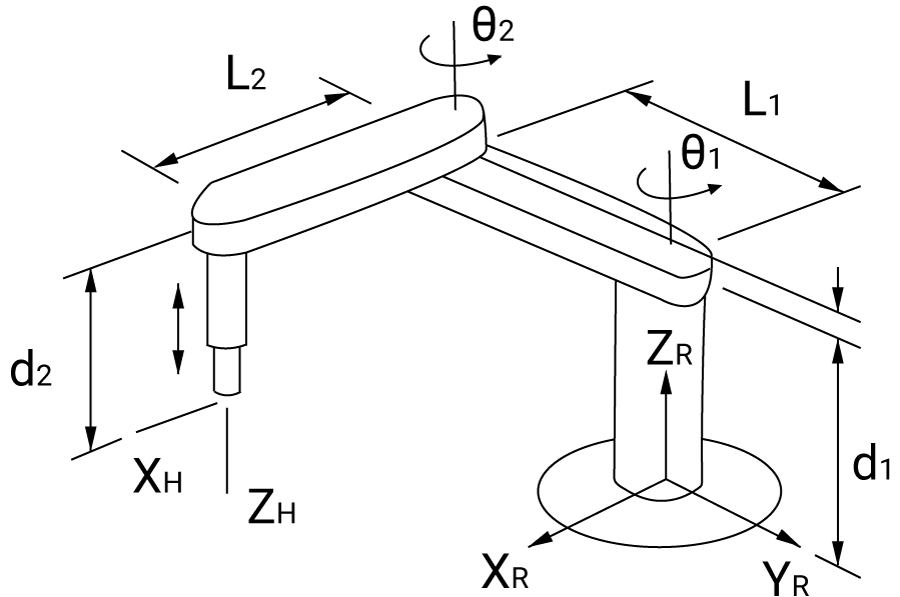
FRAME描述:
Frame=1,SCARA,如下圖,旋轉軸為關節軸,末端對應位置為虛擬的位置。
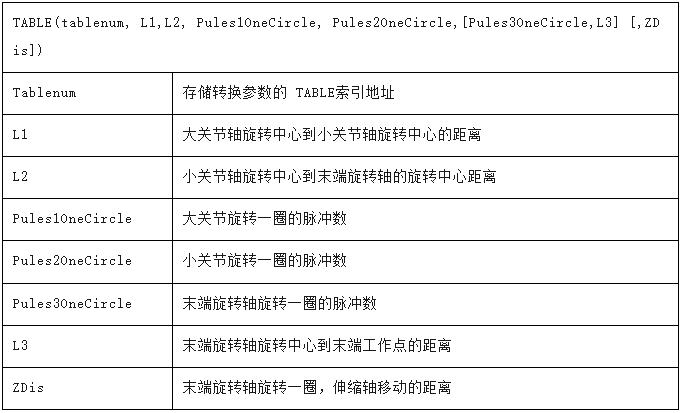
在TABLE中設置好機械結構相關參數。建立機械手連接時,需要將機械結構參數按照如下次序依次填寫到TABLE數組中。
??? 例程說明
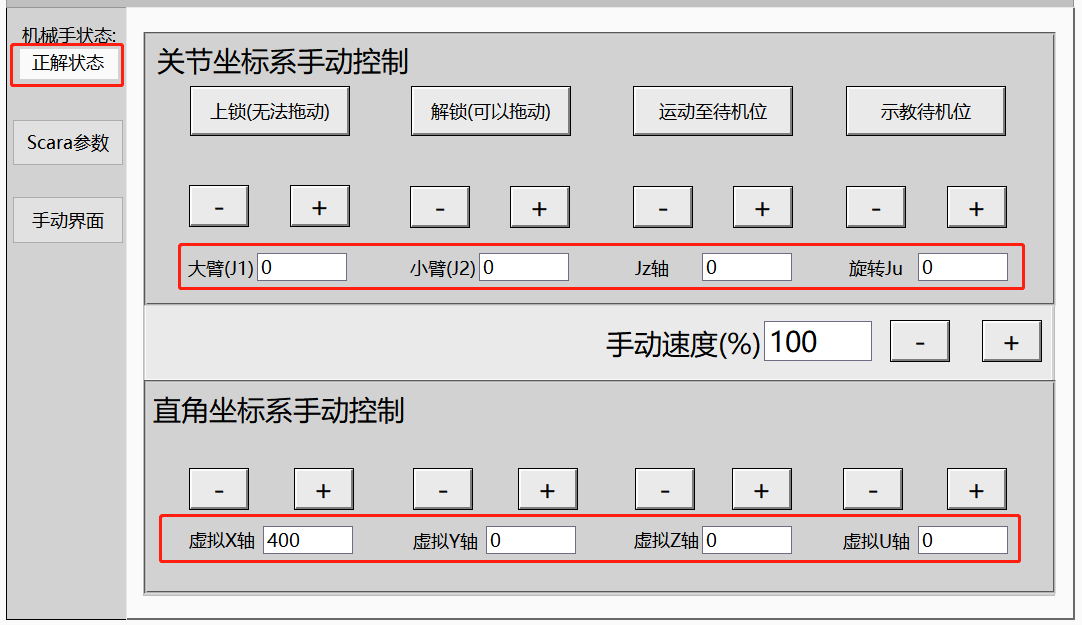
1.SCARA機械手例程界面如下。
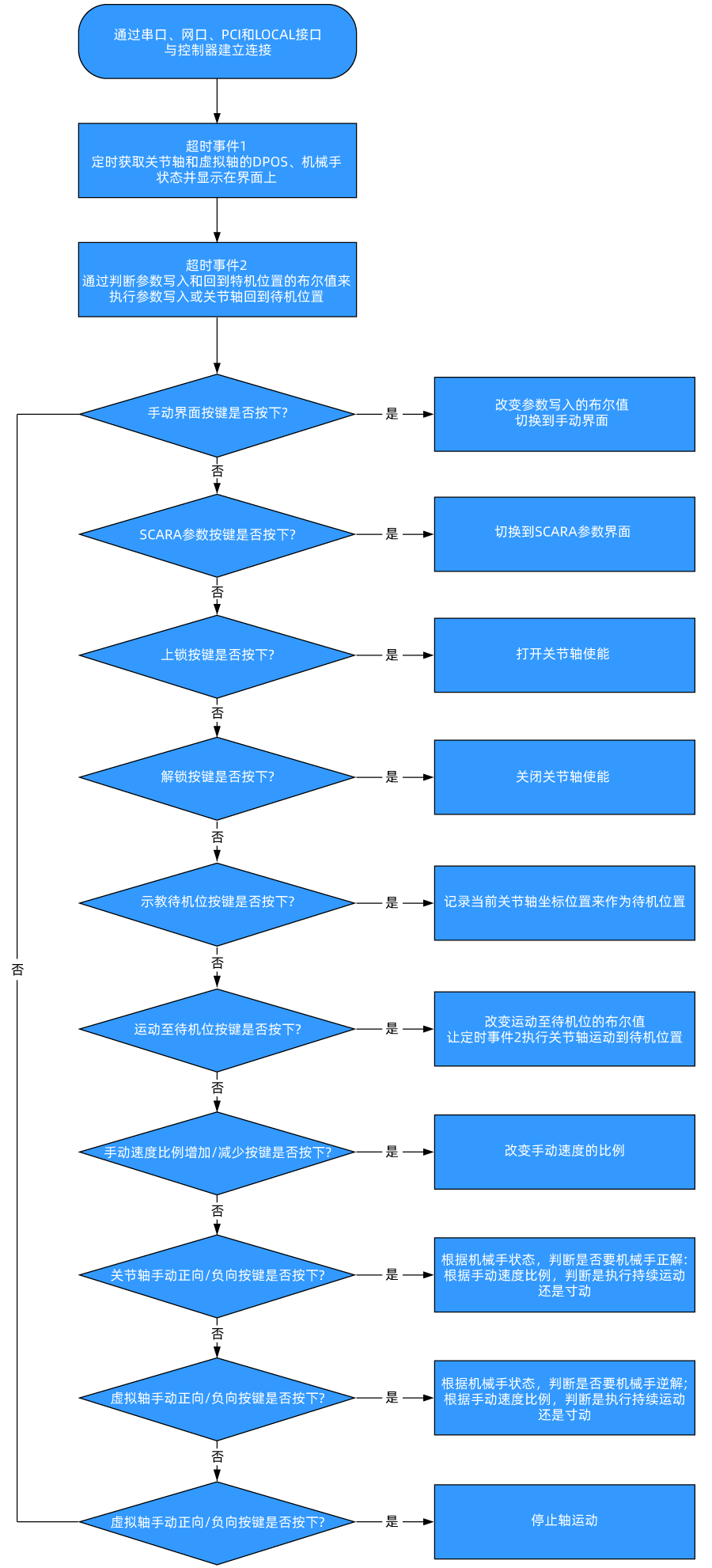
2.例程簡易流程圖。
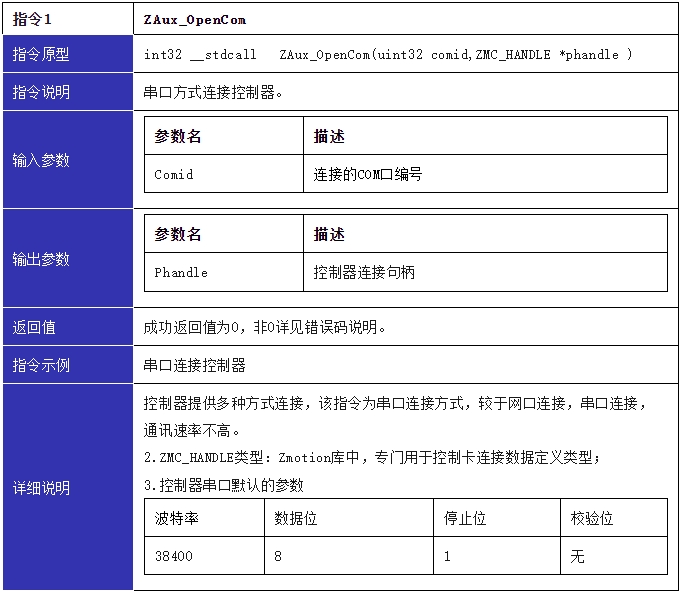
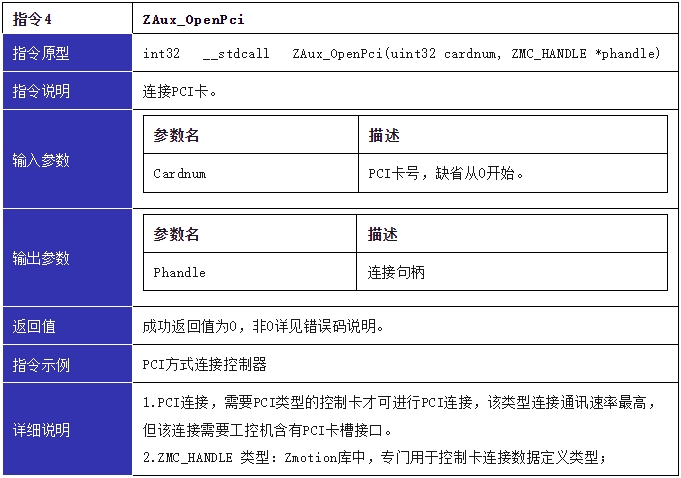
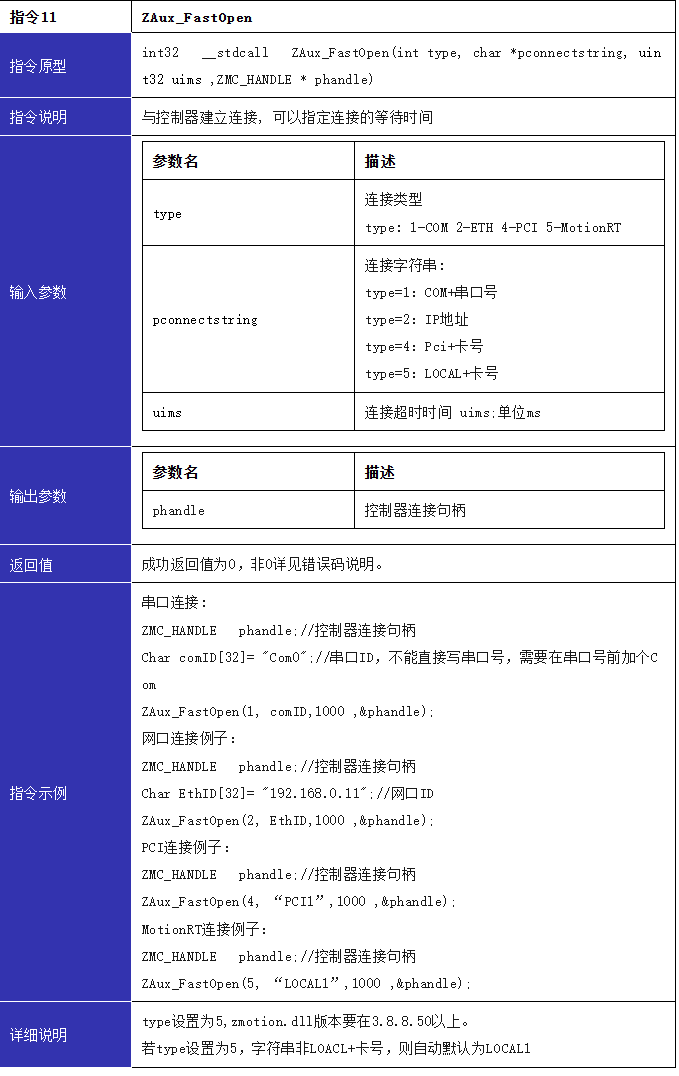
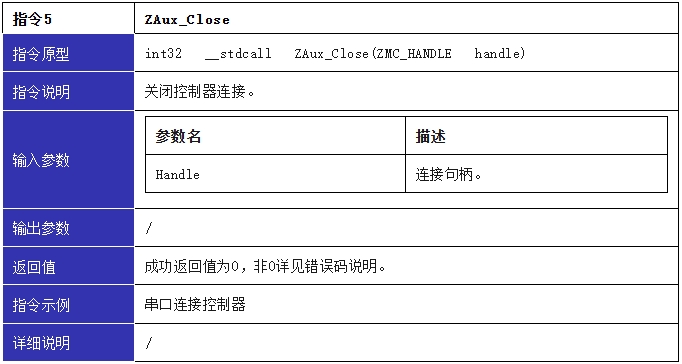
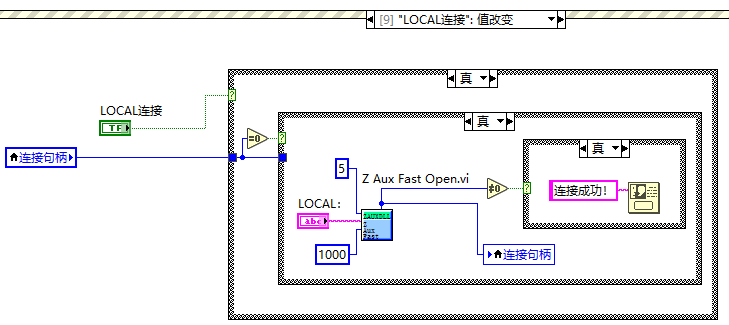
3.要想通過上位機操控控制器,就必須先鏈接控制器,上位機連接控制器的接口有四種,分別是網口連接、串口連接、PCI和LOCAL連接。
例如通過LOCAL鏈接方式的鏈接按鈕的事件響應函數來鏈接控制器。

LOCAL連接用的是ZAux_FastOpen接口。
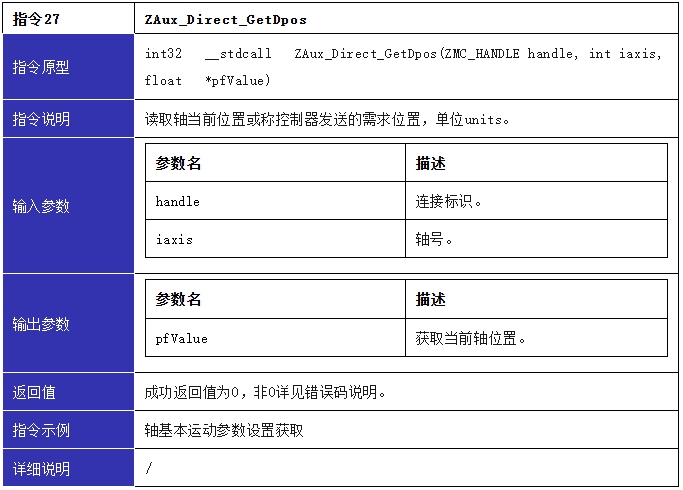
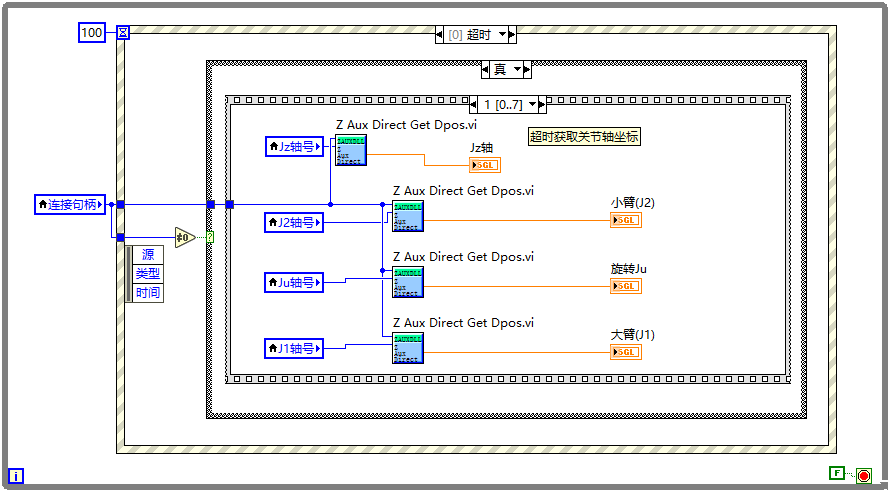
4.鏈接控制器后,通過判斷條件來進行啟動超時事件。例如通過超時獲取軸坐標、機械手狀態。
A.超時獲取關節軸坐標。
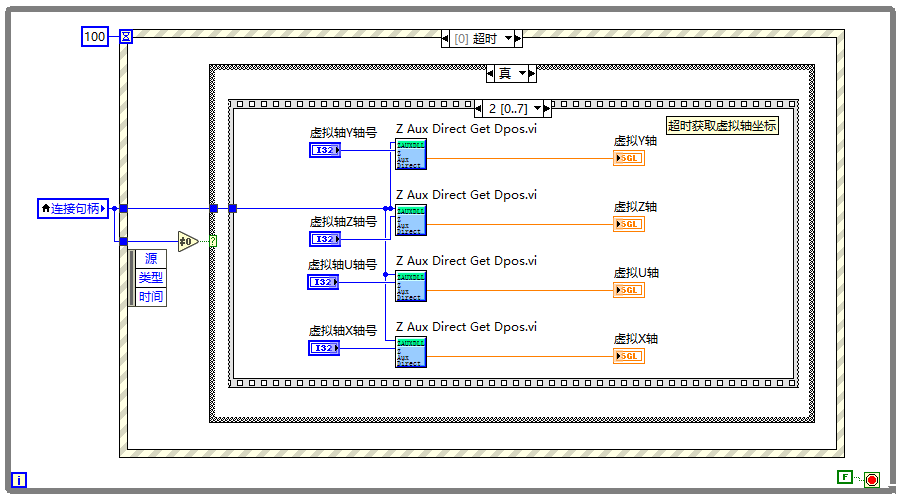
B.超時獲取關聯的虛擬軸坐標。
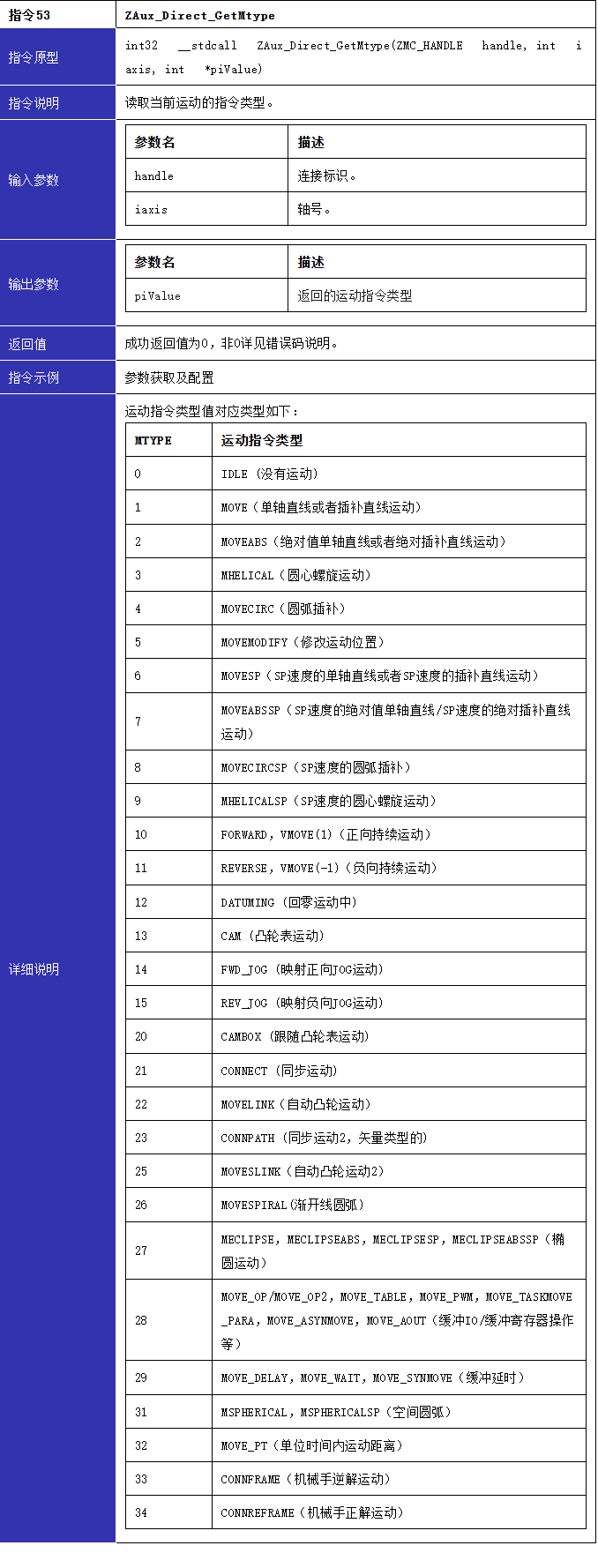
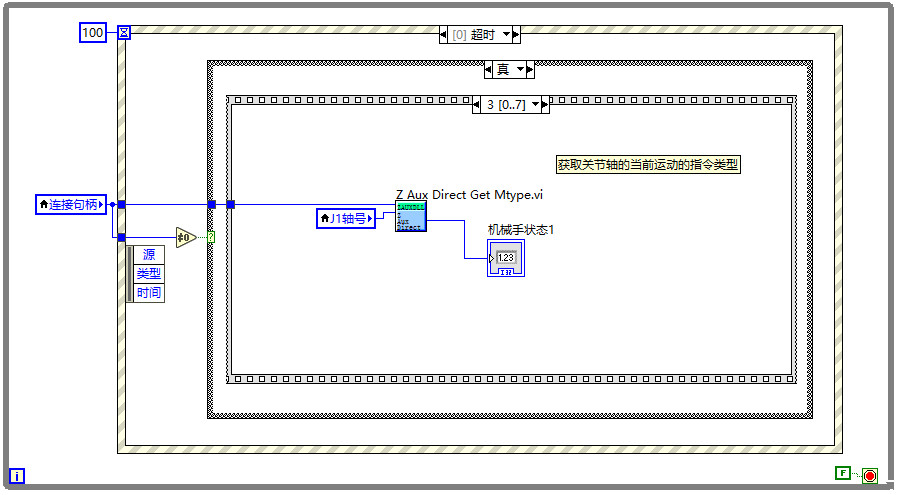
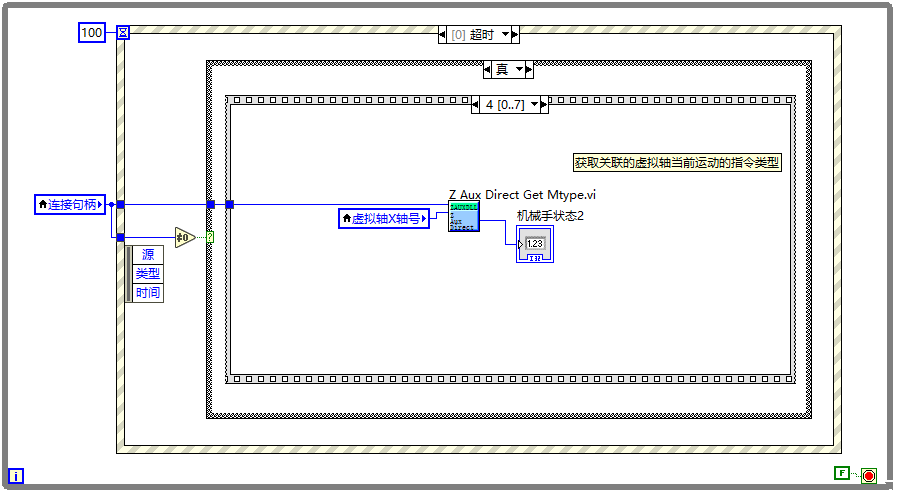
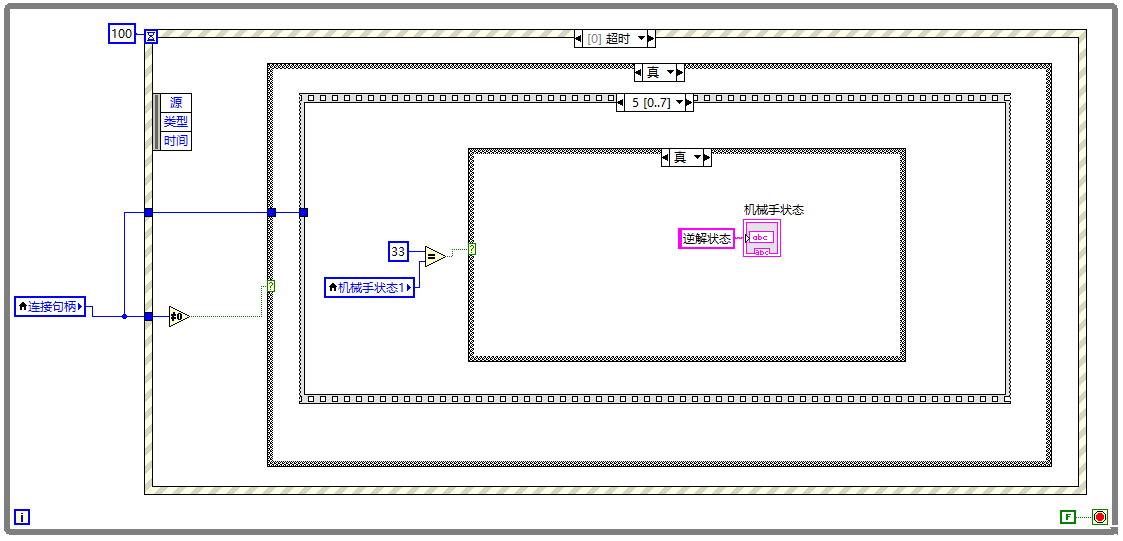
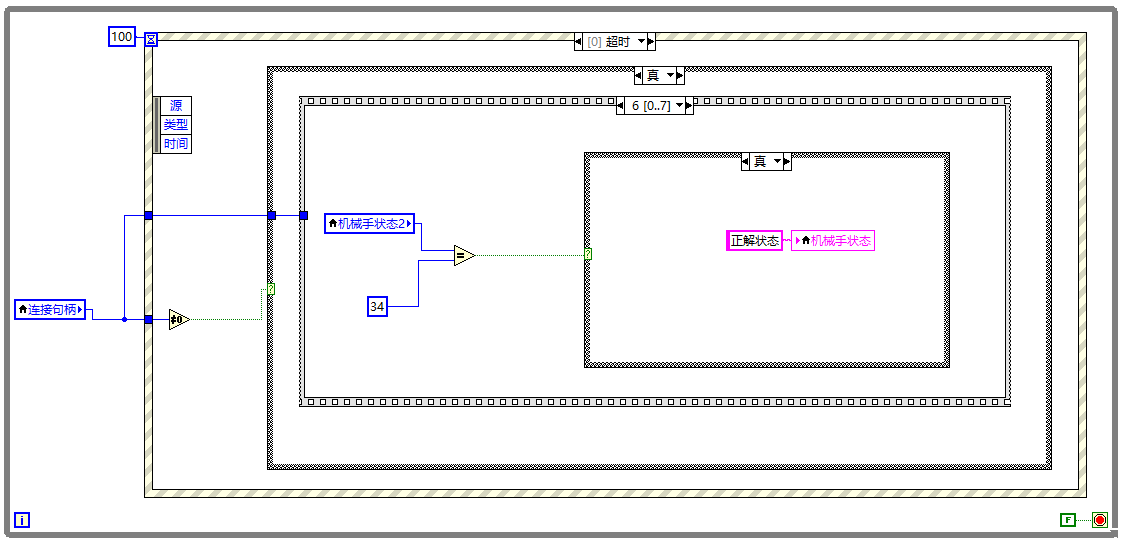
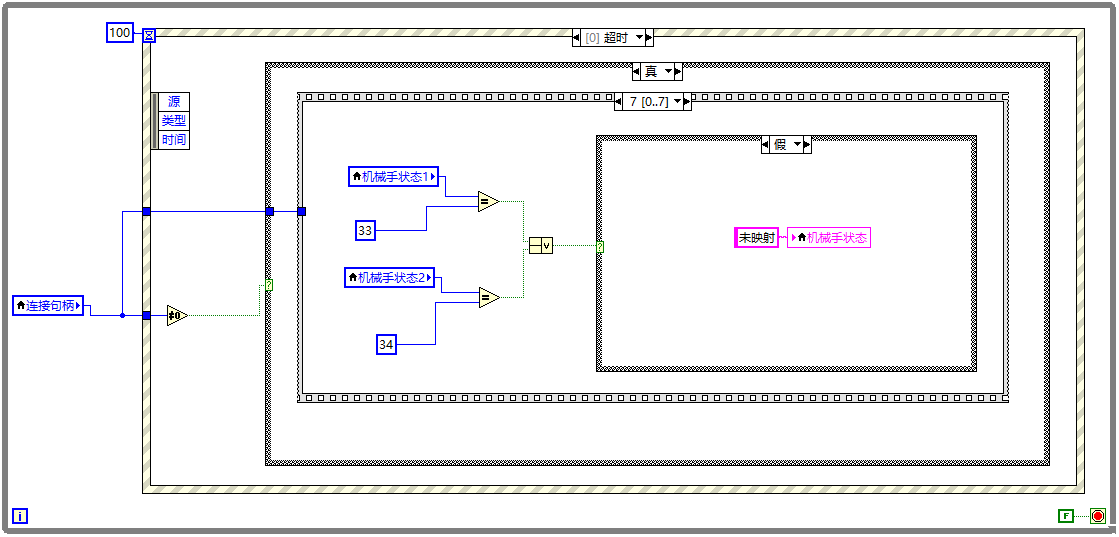
當機械手狀態為逆解時,關節軸的MTYPE(當前運動的指令類型)會變為33(機械手逆解運動),機械手狀態為正解時,虛擬軸的MTYPE(當前運動的指令類型)會變為34(機械手正解運動),可以通過判斷關節軸和虛擬軸的MTYPE的值就可以判斷機械手的狀態。
C.獲取關節軸的當前運動的指令類型。
D.獲取關聯的虛擬軸當前運動的指令類型。
E.通過判斷關節軸和虛擬軸的MTYPE的值就可以判斷機械手的狀態。
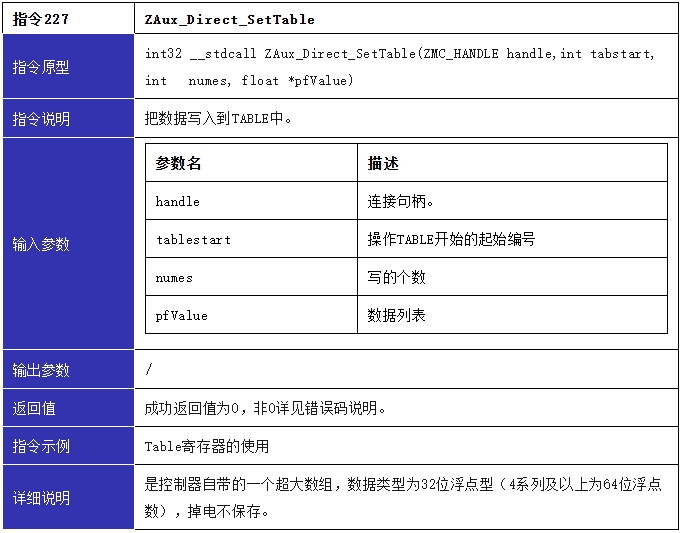
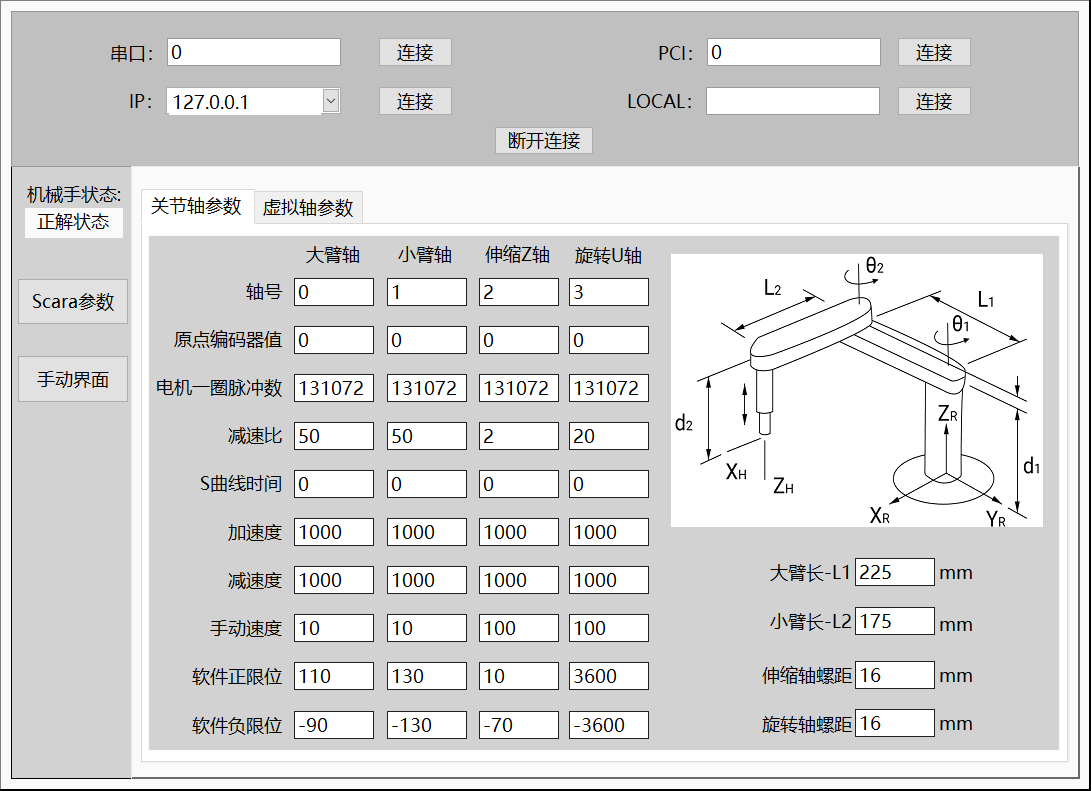
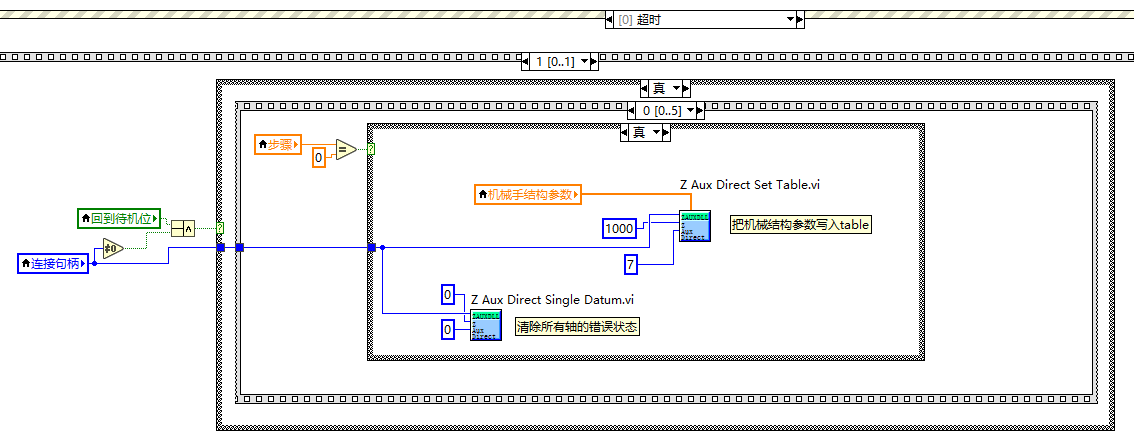
5.寫入機械手參數。
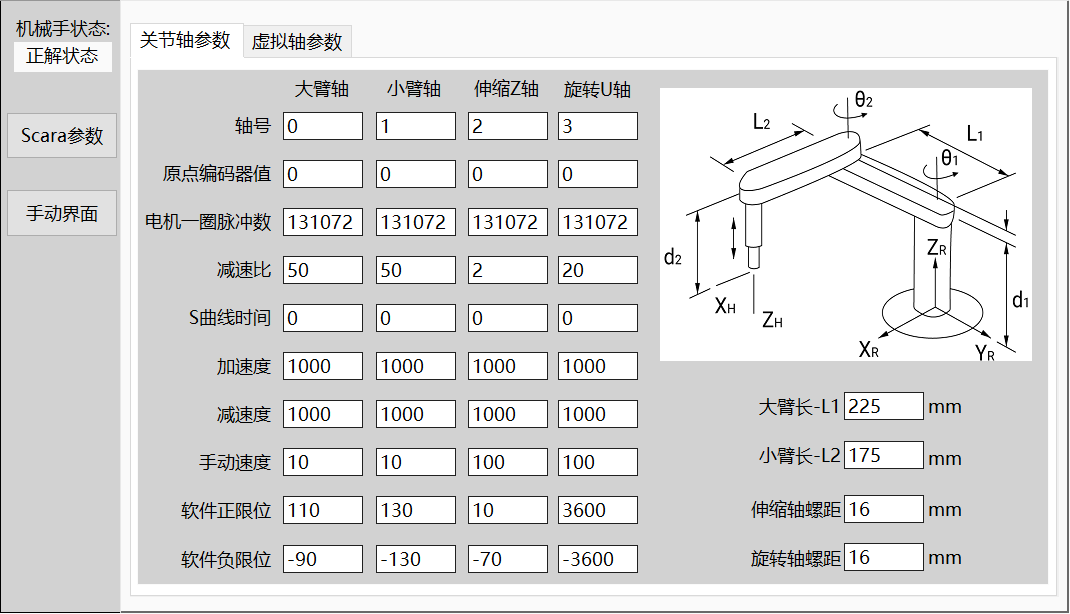
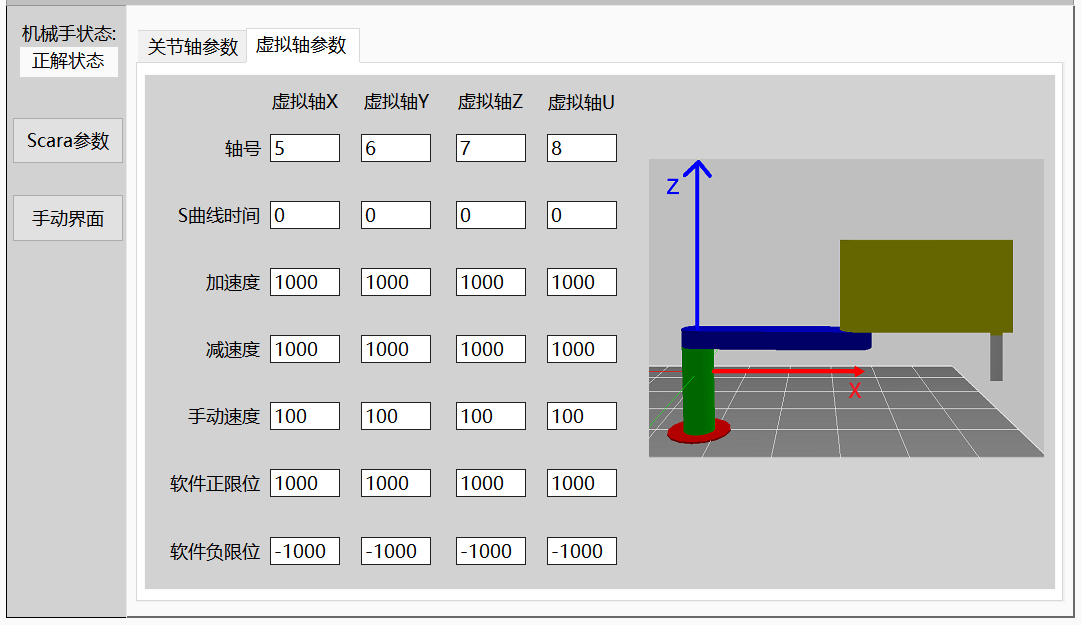
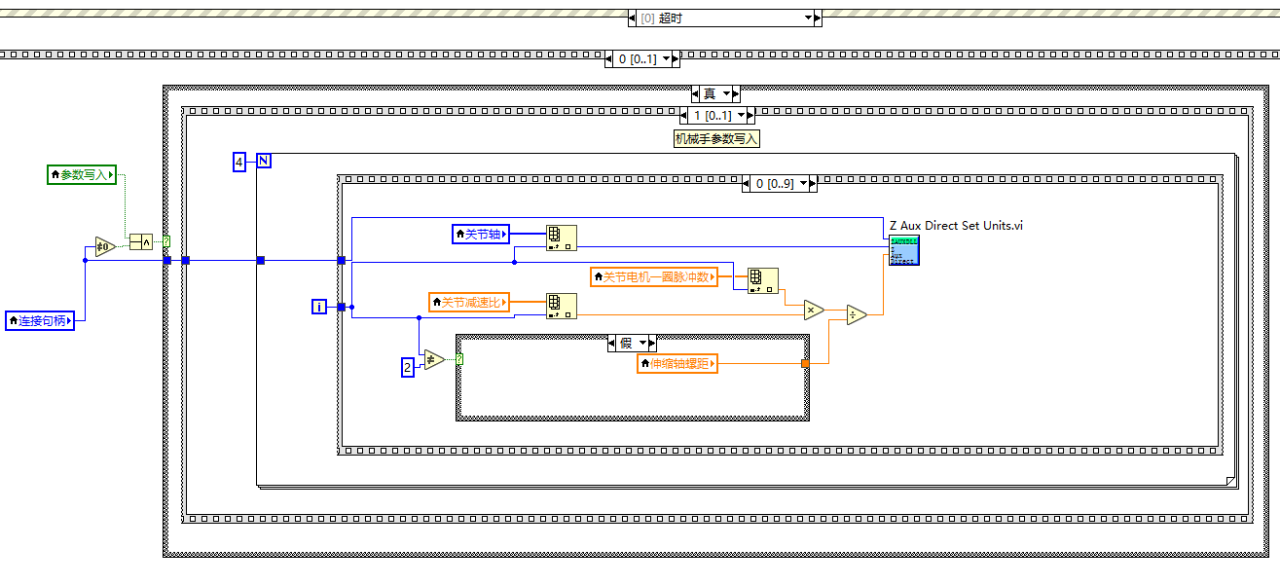
在SCARA參數界面設置完機械手參數后,然后點擊手動界面就會顯示手動界面、把機械手參數分別寫入不同的數組、改變參數寫入的布爾值,而超時事件會因為參數寫入布爾值的改變,把之前寫入不同的數組的機械手參數寫入控制器當中。
A.把機械手參數分別寫入不同的數組。
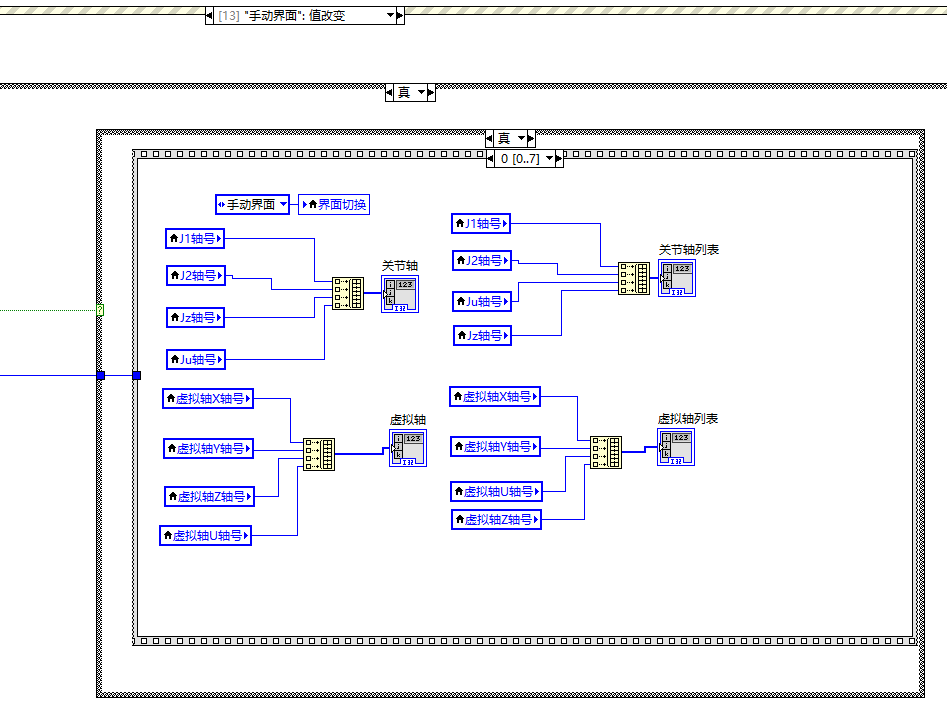
B.改變參數寫入的布爾值。
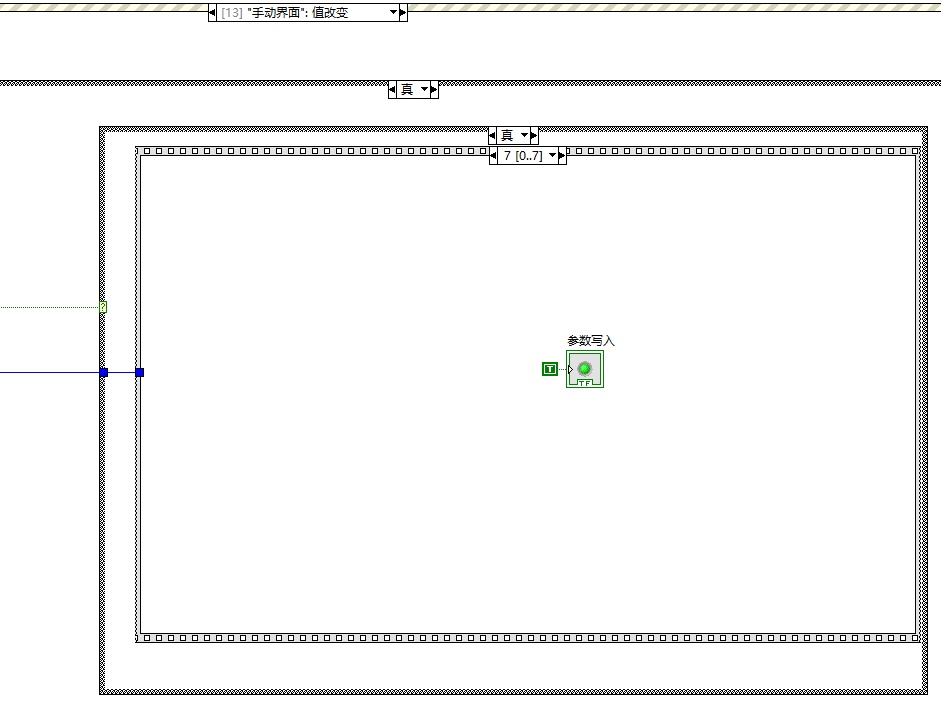
C.超時事件因為參數寫入布爾值的改變,把之前寫入不同的數組的機械手參數寫入控制器當中。
6.手動操作。
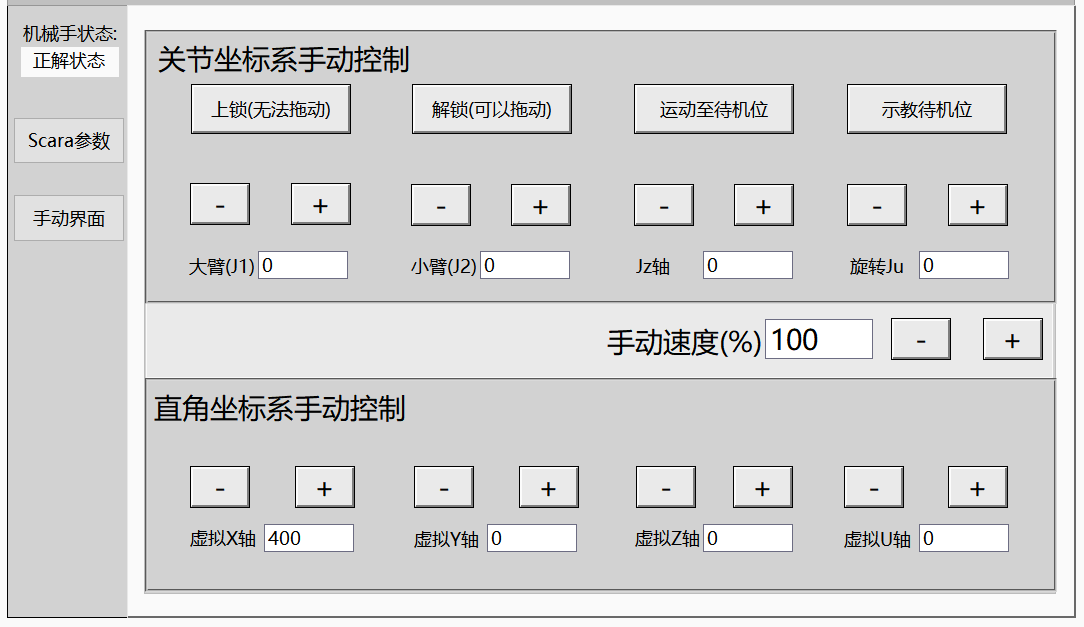
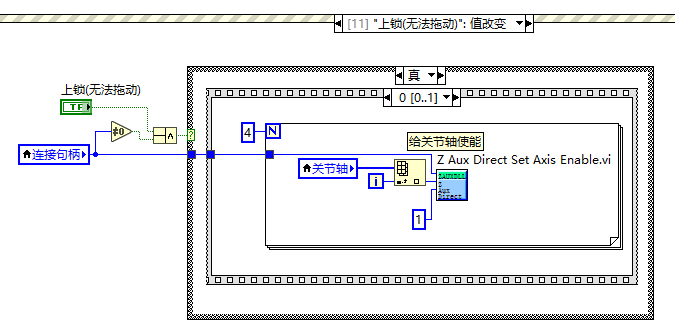
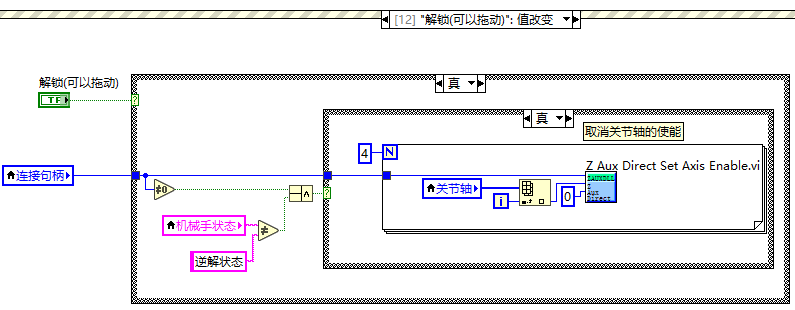
(1)機械手上鎖/解鎖
機械手上鎖/解鎖其實就是打開/關閉關節軸的使能,機械手在逆解狀態不能關閉關節軸的使能。
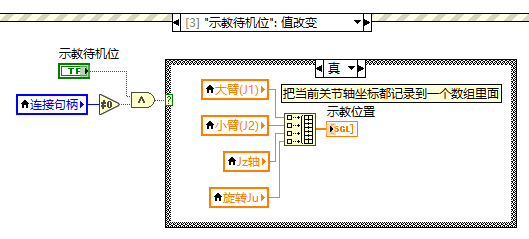
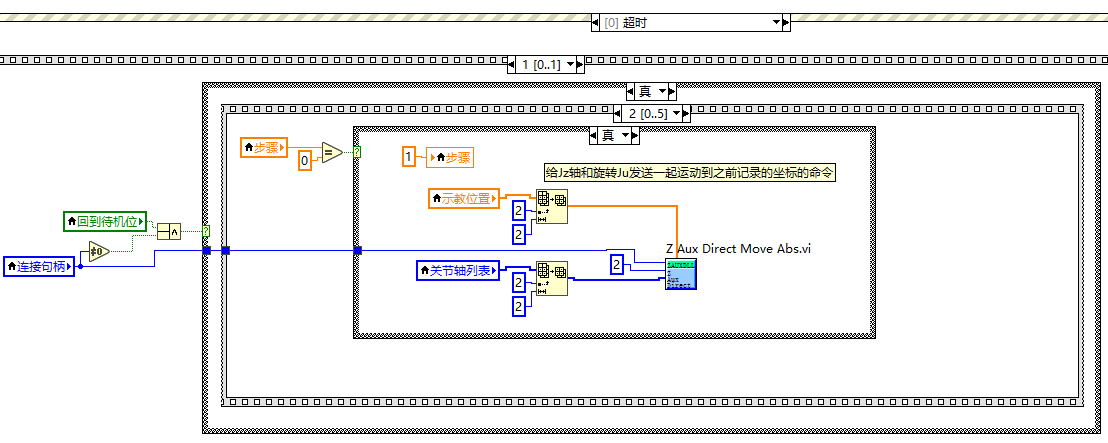
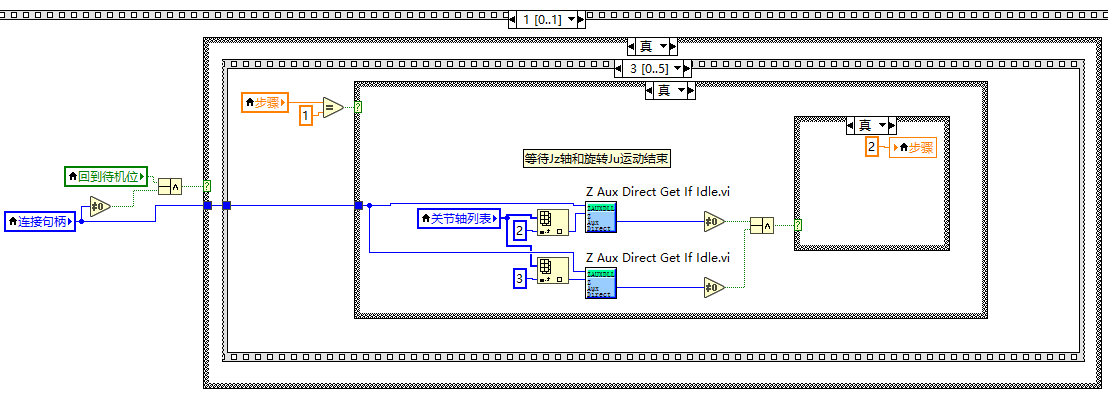
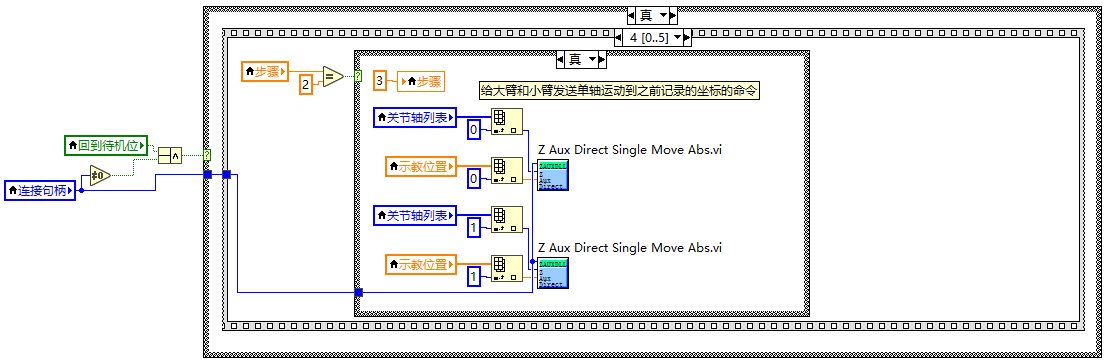
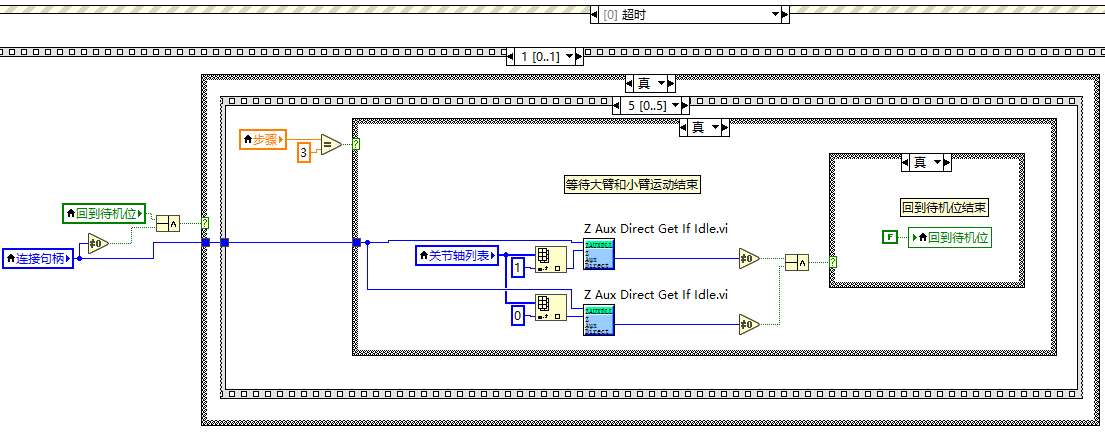
(2)示教待機位與運動至待機位。
示教待機位就是把當前的關節軸位置坐標寫入示教位置數組里,因為機械手所有關節軸軸一起運動可能會造成碰撞,所以得讓關節軸按順序運動到示教位置,要實現關節軸按順序運動到示教位置,就要等待前一個順序的關節軸運動完成,再讓下一個關節軸運動,這就有個等待關節軸運動完成的過程,如果這個過程放在事件里面,就會造成阻塞,界面就會卡住,所以為了解決這個問題,處理關節軸順序運動就放在了超時事件里面,運動至待機位按鈕事件只是負責改變一個布爾值和一個變量值,超時事件就用這布爾值作為關節軸順序運動至待機位是否開啟的判斷條件,用這變量值確保關節軸順序至待機位的步驟從頭到尾只執行一次。
A.按下示教待機位按鍵。
B.按下運動至待機位。
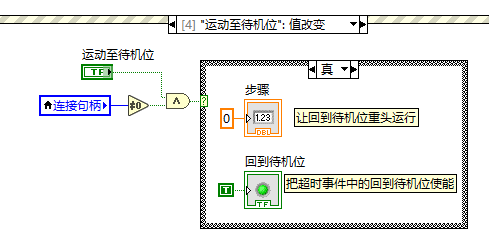
C.超時事件中的回到待機位。
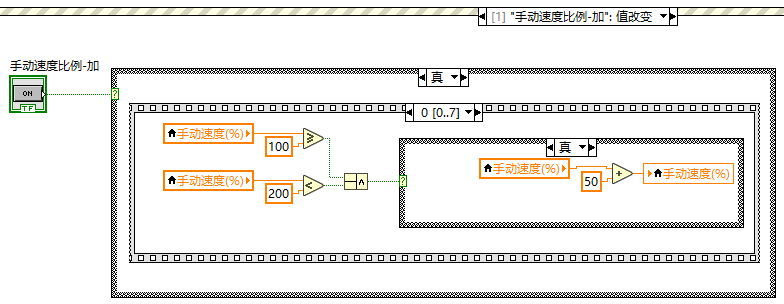
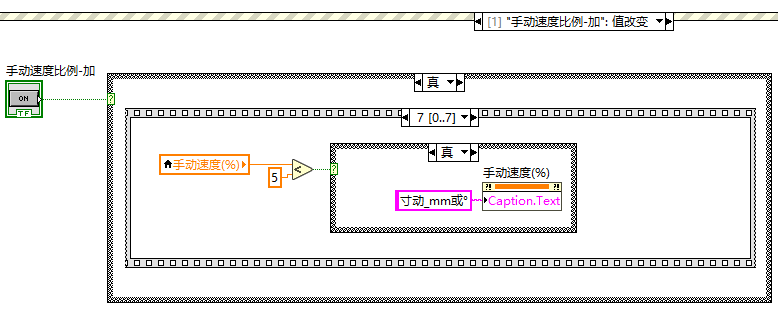
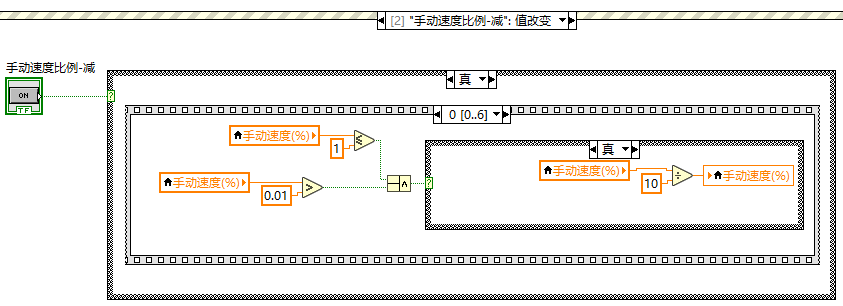
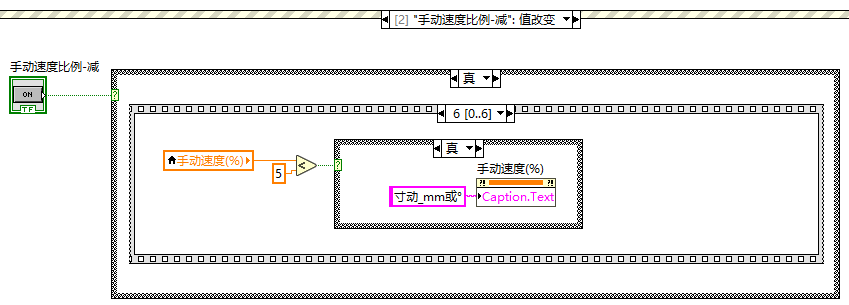
(3)手動速度比例增加/減小
手動速度比例最大為200%,最小為5%,當手動速度比例小5%,手動速度比例就會變為寸動距離或角度,寸動距離或角度最小是0.01。
手動速度比例的增加/減小是分區間的:
200%-100%:每次增加/減小50%;
100%-25%:每次增加/減小25%;
25%-5%:每次增加/減小5%;
當手動速度比例小5%:手動速度比例就會變為寸動距離或角度;
1-0.01:每次乘以/除以10。
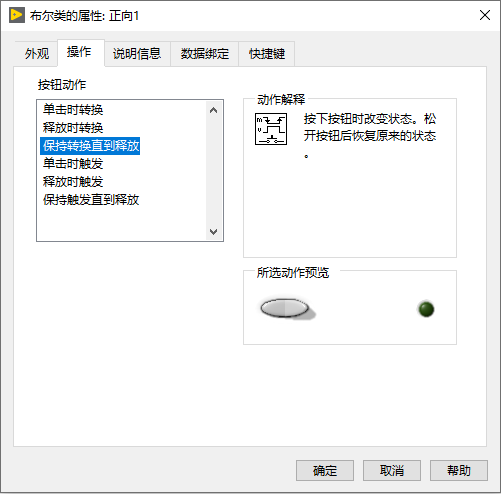
(4)關節軸/虛擬軸手動按鍵。
要實現手動按住按鈕,軸就運動,松開按鈕,軸就停止,就要首先把按鈕動作設置為保持轉換直到釋放,然后在按鈕值改變事件中添加用按鈕布爾值作判斷。
布爾值為真時,根據機械手狀態,判斷要不要進行機械手正/逆解,然后根據手動速度比例是否大于5,來判斷使用單軸持續運動接口,還是使用單軸相對運動接口;
布爾值為假時,會根據手動速度比例是否大于5,判斷是否使用單軸停止接口。下面以按鍵負向1為例子說明:
A.把按鈕動作設置為保持轉換直到釋放。
B.根據機械手狀態,判斷要不要進行機械手正/逆解。
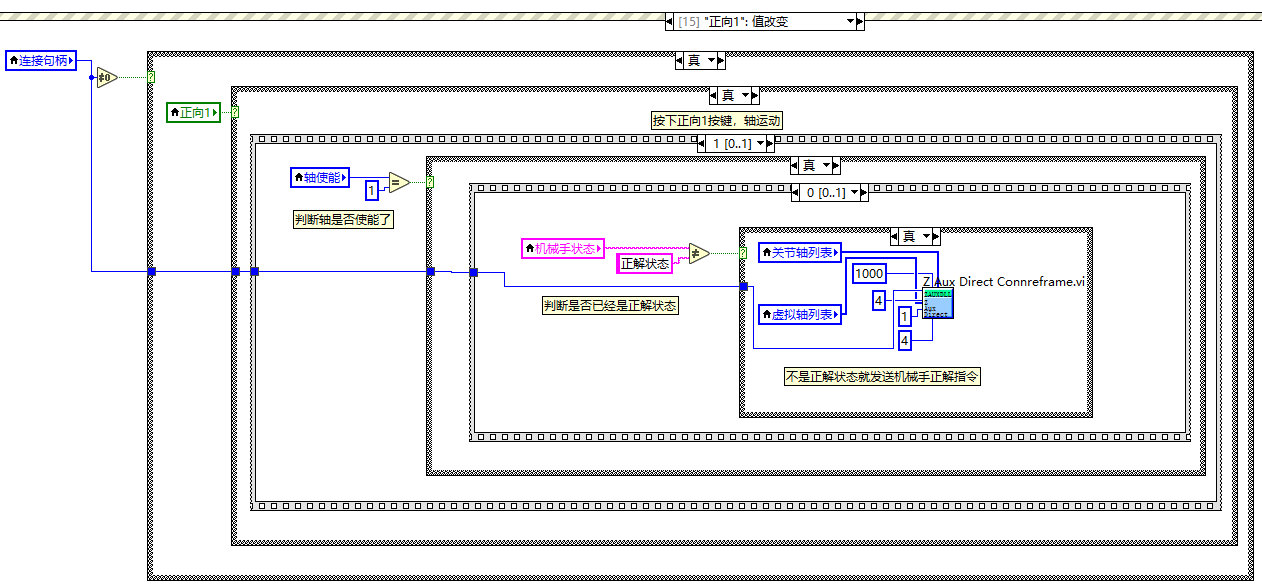
C.根據手動速度比例是否大于5,來判斷使用單軸持續運動接口,還是使用單軸相對運動接口。
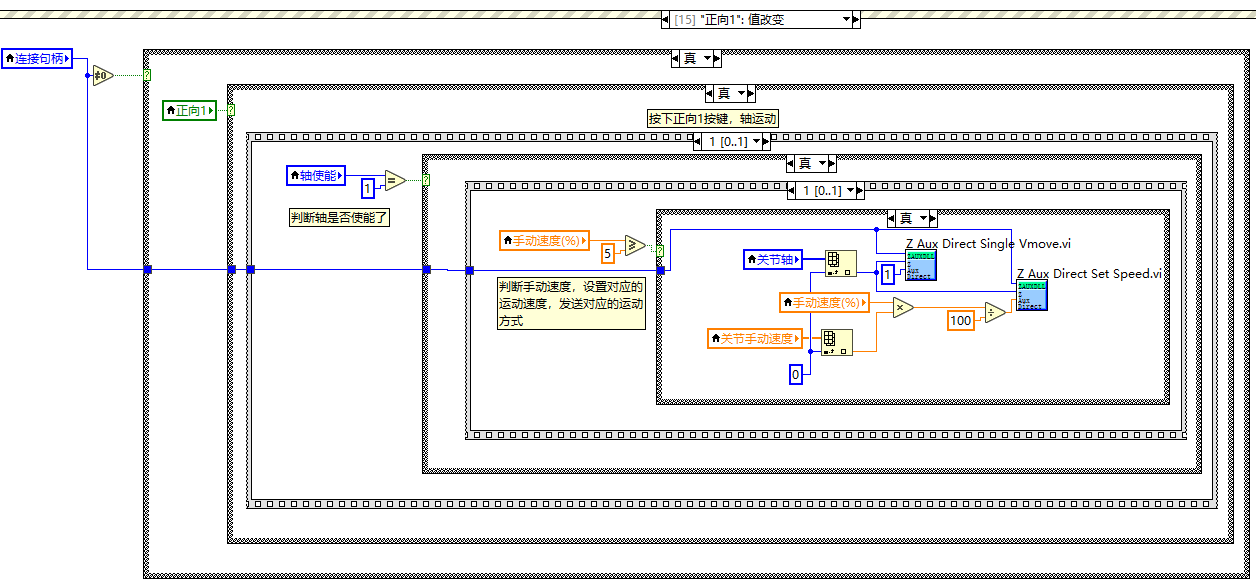
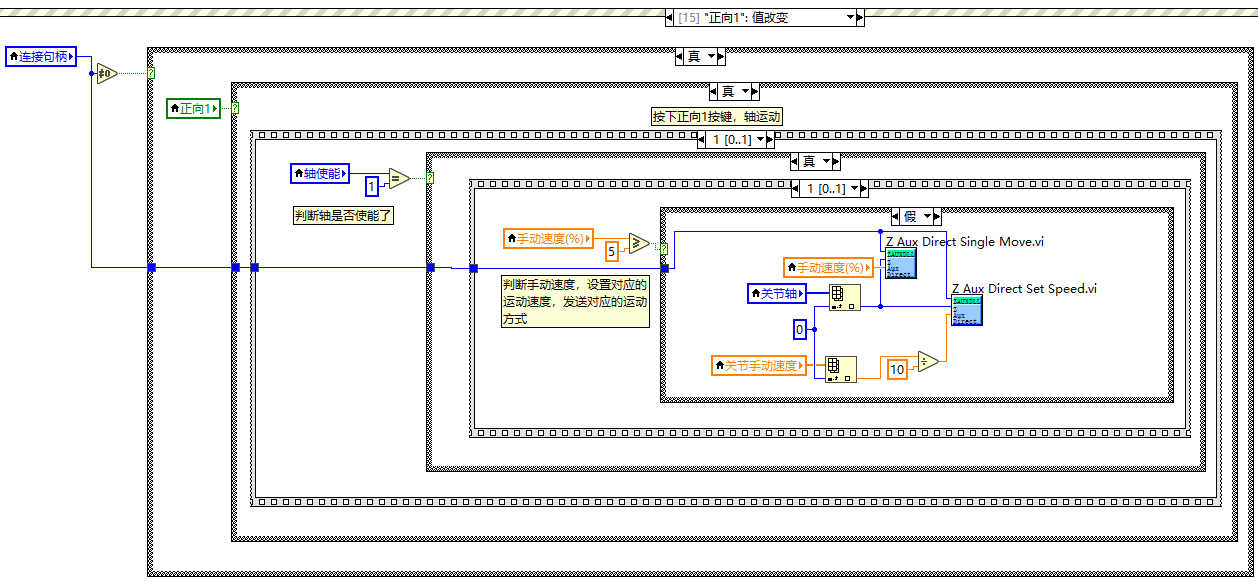
D.按鍵松開時,會根據手動速度比例是否大于5,判斷是否使用單軸停止接口。
操作演示視頻可點擊→“視頻教程:LabVIEW運動控制(一):EtherCAT運動控制器的SCARA機械手應用”查看。
本次,正運動技術LabVIEW運動控制(一):EtherCAT運動控制器的SCARA機械手應用,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
448瀏覽量
25221 -
機械手
+關注
關注
7文章
345瀏覽量
30315 -
SCARA
+關注
關注
0文章
54瀏覽量
13612 -
EtherCAT控制器
+關注
關注
0文章
18瀏覽量
684
發布評論請先 登錄
















 工商網監
工商網監
評論