 使用高側開關控制器解決驅動容性負載挑戰的各種方法
使用高側開關控制器解決驅動容性負載挑戰的各種方法

在上期中,我們探討了跳頻技術及其演變,并對傳統方法和高級方法(例如通用輸入/輸出 (GPIO) 和快速重新配置接口 (FRI))進行了比較。
本期,為大家帶來的是《為汽車區域性配電系統中的非板載容性負載供電》,將討論使用高側開關控制器解決驅動容性負載挑戰的各種方法。
引言
車輛架構從域向區域的轉變顯著改變了汽車的配電方式,基于半導體開關的解決方案(請參閱圖 1)正在取代傳統的熔斷型保險絲用于線束保護。這些解決方案具有諸多優勢,例如保險絲時間電流的可變性更小,因此可以降低線束的電纜直徑、重量和成本。半導體開關還可遠程復位,這意味著保險絲不必易于觸及,使設計人員能夠將保險絲放置在更合理的位置以縮短從電源到負載的電纜長度。
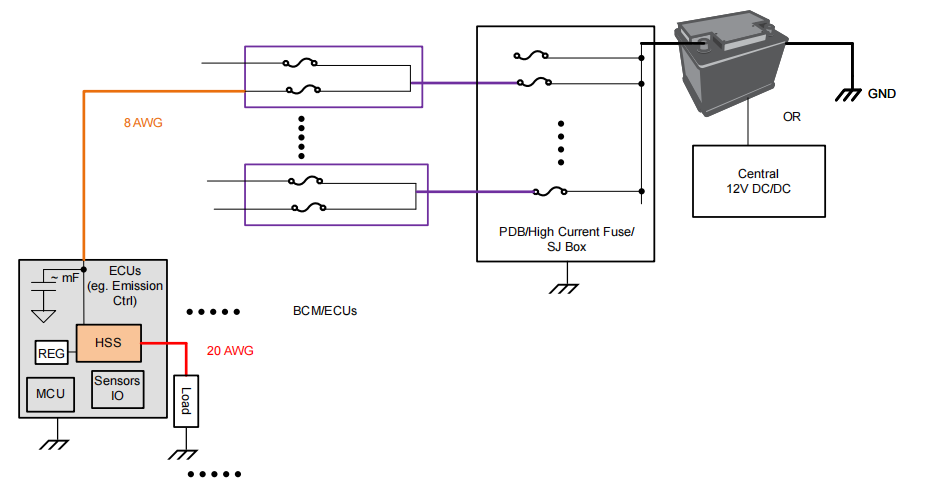
圖 1:基于域的配電架構
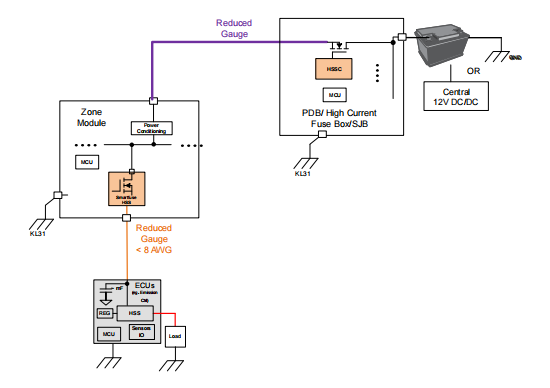
圖 2:基于區域的配電架構
使用半導體開關作為智能保險絲器件時,系統面臨的設計挑戰包括降低開關處于導通狀態時的靜態電流,以及開啟輸出來為負載(電子控制單元 [ECU] 輸入)中常見的大型容性負載供電。ECU 的輸入電容范圍為 47μF 至 5mF,啟動時間(快速充電時間 <1ms、中等充電時間 <10ms、慢速充電時間 <50ms)需要根據每個配電盒 (PDB) 輸出端上連接在一起的 ECU 類型和數量考慮。在 ECU 啟動時間內通過金屬氧化物半導體場效應晶體管 (MOSFET) 開關為這些 ECU 輸入電容器充電,是區域性架構面臨的主要系統設計挑戰之一。
在本文中,我們將討論使用高側開關控制器解決驅動容性負載挑戰的各種方法。
輸出電壓壓擺率控制
這種方法是在柵極與 GND 之間放置電容器 (C),柵極的壓擺率和輸出電壓可以限制浪涌電流。具有輸出電壓壓擺率控制的電路配置如圖 3所示。
方程式 1和方程式 2用于計算啟動時的浪涌電流和功率耗散:
方程式 1

方程式 2
由于 MOSFET 在飽和區域運行,因此浪涌電流應足夠低,使啟動期間功率耗散保持在其安全工作區 (SOA) 以內。當 MOSFET 的功率耗散降低并存在較長的時間段時,MOSFET 可以處理更多能量 (1/2 COUTVIN2)。因此,浪涌間隔需要延長,以便支持更高的容性負載。
這種方法適合慢充電要求(例如 5mF 和 50ms),但設計必須始終考慮 COUT、FET SOA、充電時間和工作溫度之間的權衡。例如,使用 TI 的高側開關控制器TPS1211-Q1作為柵極驅動器,將 5mF 充電至 12V 需要 40ms(浪涌電流限制為 1.5A)。
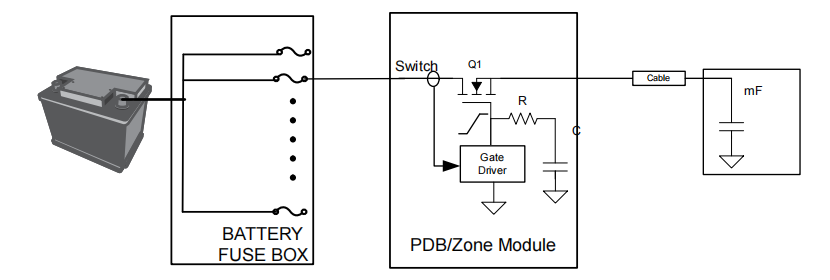
圖 3:輸出電壓壓擺率控制電路
并聯預充電路徑
這種方法通常用于基于大電流并聯 FET 的設計,這些設計需要一個額外的柵極驅動器來驅動預充電 FET,如圖 4所示。您可以根據方程式 3選擇預充電路徑中的預充電電阻器 (Rpre-ch),以便將浪涌電流限制為特定值:
方程式 3
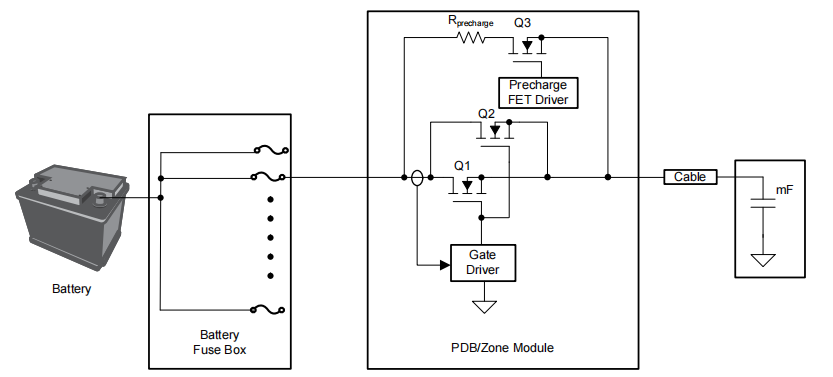
圖 4:并聯路徑中具有預充電電阻器和 FET 的電路
由于預充電電阻器可處理啟動期間的所有功率應力,因此它應該能夠處理平均功率耗散和峰值功率耗散(以方程式 4和方程式 5表示):

方程式 4
方程式 5
在這種情況下可以進行快速輸出充電,但代價是要使用非常大的預充電電阻器。例如,在 10ms 內將 5mF 充電至 12V 需要一個額定功率為 36W、峰值功率處理能力為 360W 的 0.4Ω 預充電電阻器,從而形成一個龐大的繞線電阻器。所以,這種解決方案不適用于許多類型的終端設備,因為同一 PCB 上有許多通道。每個通道將需要一個大型電阻器,導致解決方案的空間利用率較低。
基于 PWM 的電容器自動充電
如圖 5所示,PCB 中的高側驅動器輸出通過 1 米到幾米不等的長電纜連接到遠程 ECU。例如,一條 50A 導線 (8AWG) 線束具有 2mΩ/米和 1.5μH/米的特性。D1 二極管是系統設計的一部分,可為電纜線束電感電流提供續流路徑。高側驅動器具有強大的柵極驅動輸出,能夠在較短 (<1μs) 的導通和關斷時間內并聯驅動 FET,從而提供過流和短路保護。電纜寄生電容、D1 二極管和高側 MOSFET 構成典型的降壓穩壓器配置。
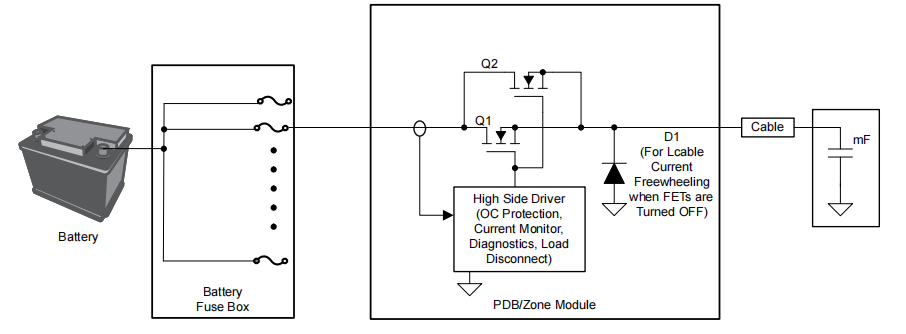
圖 5:使用高側驅動器進行脈寬調制 (PWM) 充電的電路示意圖
啟動期間,未充電的輸出電容器會吸收浪涌電流,并在浪涌電流達到短路保護閾值 (ISCP) 時觸發短路事件。高側驅動器可以關斷電源路徑并在重試周期 (TAUTO-RETRY) 過后重新執行導通。此過程一直持續到輸出電容充滿電為止(如圖 6所示),之后高側驅動器進入正常運行狀態并驅動負載。
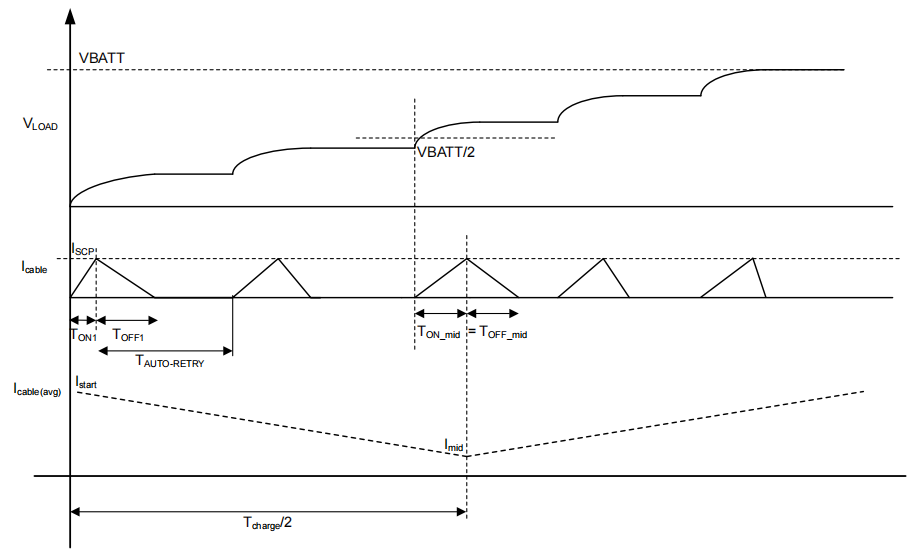
圖 6:PWM 充電方法啟動期間的概念波形
圖 7展示了控制操作。如圖所示,這種方法有兩個變量 ISCP 和 TAUTO-RETRY,需要根據輸入電壓 (VIN)、負載電容和所需充電時間為高側驅動器設置這兩個變量。較高的 ISCP 閾值或較短的 TAUTO-RETRY 延遲可實現更快的輸出充電,因此該解決方案適用于任何負載電容值。
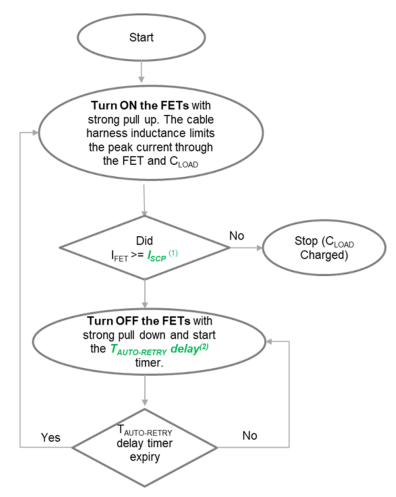
圖 7:PWM 充電控制方法的流程圖
此解決方案利用了典型高側驅動器系統中的現有可用空間(電纜線束電感和 D1 二極管),并通過以開關模式運行高側 MOSFET 來創建一種高效的充電方法。與傳統方法不同,建議的解決方案不再依賴于 FET SOA,不再需要龐大的預充電電阻器,也不需要任何預充電 FET 和驅動器。此解決方案使用高側驅動器固有的短路保護功能,并可以在沒有任何外部控制信號或復雜算法的情況下自主運行。
設計注意事項和測試結果
請考慮以下50A 負載的系統設計示例:
電池電壓 (VBATT) = 12V。
負載電容 (CLOAD) = 5mF。
1.5m 電纜 = 8AWG,用于將高側驅動器連接到 ECU,使 Lcable = 2.25μH。
充電時間 (Tcharge) = 10ms。
續流二極管壓降 (VD1) = 0.7V。
該設計涉及選擇 ISCP 和 TAUTO-RETRY 參數。對于 50A 負載設計,ISCP 閾值通常設置為比最大負載電流高 20%,因此在本例中,該閾值為 50A × 1.2 = 60A。
現在,要計算 TAUTO-RETRY,請參閱圖 6,并根據電容器在 Tcharge/2 中點的電流-電壓關系獲得方程式 6:

方程式 6
其中:

方程式 7
且

方程式 8
時間間隔 TON1、TOFF1 和 TON_mid 可以通過方程式 9至方程式 11進行計算:
方程式 9
方程式 10
方程式 11
代入已知參數 VBATT、Lcable、ISCP、VD1 和 CLOAD 并求解TAUTO-RETRY 可得出實現 10ms 充電時間的重試延遲為<200μs。
圖 8和圖 9顯示了使用 TPS1211-Q1 高側驅動器為 5mF 負載電容充電時的應用原理圖和測試設置。TAUTO-RETRY 為 180μs,因此可得出充電時間為 7ms,如圖 10所示。
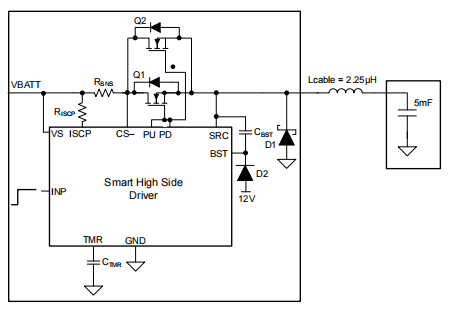
圖 8:驅動容性負載的典型應用原理圖
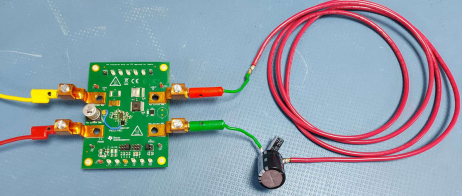
圖 9:使用 TPS1211-Q1 評估模塊及 1.5m 電纜線束的測試設置
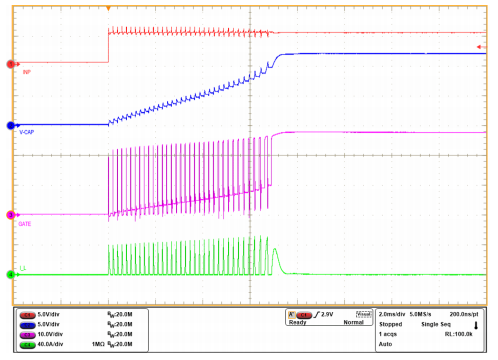
圖 10:在開關模式下使用 TPS1211-Q1 以 5mF 負載電容進行啟動
結語
基于半導體的智能保險絲解決方案在汽車配電應用中比傳統的熔斷型保險絲更受歡迎,因為此類解決方案具有顯著改善的保險絲時間電流特性和可通過軟件進行復位的功能。由于電纜更細且更短,這些優勢有助于降低電纜線束的整體重量。
當系統設計采用基于半導體的智能保險絲解決方案時,面臨的挑戰之一是電容器負載充電是否可以滿足系統啟動時間要求。TI 的高側開關控制器器件提供了各種方法來應對容性負載驅動的挑戰。
-
接口
+關注
關注
33文章
8977瀏覽量
153533 -
配電系統
+關注
關注
2文章
607瀏覽量
26728 -
開關控制器
+關注
關注
0文章
69瀏覽量
18444 -
負載供電
+關注
關注
0文章
15瀏覽量
11980
原文標題:模擬芯視界 | 為汽車區域性配電系統中的非板載容性負載供電
文章出處:【微信號:tisemi,微信公眾號:德州儀器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
電源系統開關控制器的MOSFET 選擇
保持電容性負載穩定的六種方法
開關控制器的 MOSFET 選擇是一個復雜的過程哦,來教你怎么選擇MOSFET
基于SOT-23封裝的單和雙微功率高側開關控制器
如何利用RISO及CL補償穩定驅動容性負載的運算放大器?
高側開關設計

用于汽車負載應用的高側SmartFET驅動器

如何使用高壓放大器驅動高容性負載
驅動容性負載時,為什么輸出端增加串聯電阻,可以提升穩定性?
LM3477 用于開關穩壓器的高效高側 N 溝道控制器數據手冊





 工商網監
工商網監
評論