") 大象機(jī)器人推出移動(dòng)復(fù)合機(jī)器人myAGV Pro
大象機(jī)器人推出移動(dòng)復(fù)合機(jī)器人myAGV Pro

新品重磅發(fā)布
當(dāng)自動(dòng)駕駛算法應(yīng)用于真實(shí)道路和物流運(yùn)輸,當(dāng)專(zhuān)業(yè)級(jí)機(jī)械臂走進(jìn)課堂示教編程,在這個(gè)人工智能與機(jī)器人技術(shù)的快速發(fā)展的時(shí)代,人們不再滿(mǎn)足于基礎(chǔ)編程實(shí)踐,而是渴望在仿真環(huán)境中探索多機(jī)協(xié)同算法等前沿課題。與此同時(shí),實(shí)驗(yàn)室對(duì)機(jī)器人模擬場(chǎng)景中測(cè)試識(shí)別、抓取、避障、搬運(yùn)全鏈路也提出了更高期待。
因此,移動(dòng)復(fù)合機(jī)器人myAGV Pro應(yīng)需而生。
myAGV Pro是大象機(jī)器人旗下的全向轉(zhuǎn)向系統(tǒng)小車(chē),適配大象機(jī)器人旗下輕量化協(xié)作機(jī)械臂生態(tài)和市面上大部分通用協(xié)作機(jī)器人,能夠完成多目標(biāo)環(huán)境檢測(cè)、語(yǔ)音語(yǔ)義識(shí)別等人工智能的相關(guān)應(yīng)用,我們希望這款復(fù)合機(jī)器人底盤(pán)能夠?yàn)檠芯咳藛T與開(kāi)發(fā)者在智能機(jī)器人領(lǐng)域進(jìn)行倉(cāng)儲(chǔ)搬運(yùn)、教學(xué)學(xué)習(xí)、創(chuàng)新應(yīng)用、科研研究和競(jìng)技比賽等場(chǎng)景提供一個(gè)理想平臺(tái)。
七大核心亮點(diǎn),驅(qū)動(dòng)高效探索
1多樣模塊,擴(kuò)展無(wú)限可能
myAGV Pro 采用模塊化設(shè)計(jì)理念,擁有豐富配件,可選配Jetson Orin Nano主控或其他外接控制器,更可擴(kuò)展2D/3D激光雷達(dá)與視覺(jué)相機(jī)模組,輕松構(gòu)建個(gè)性化具身智能方案。
2全向馳騁,征服復(fù)雜地形
強(qiáng)勁電機(jī)實(shí)現(xiàn)1.5m/s極速運(yùn)動(dòng),自由選配麥克納姆輪/全向輪+搖擺懸掛系統(tǒng)
輕松攀爬10°陡坡,50kg高負(fù)載,無(wú)壓力承載各類(lèi)協(xié)作機(jī)械臂,平滑地面到障礙地形皆能從容應(yīng)對(duì)。
3豐富生態(tài),支持二次開(kāi)發(fā)
原生搭載Ubuntu 22.04,提供RVIZ、Gazebo仿真環(huán)境支持。同時(shí)集成ROS2 Humble框架,支持Gmapping、Cartographer及Rtab-map主流3D SLAM算法。全面開(kāi)放Python/ C++/ ROS2/ RS232串口通訊協(xié)議控制等二次開(kāi)發(fā)通道,助力用戶(hù)全心投入創(chuàng)新內(nèi)核,告別繁瑣環(huán)境部署,快速完成從高精度建圖導(dǎo)航到多機(jī)協(xié)同的各類(lèi)開(kāi)發(fā)任務(wù)。
3D SLAM建圖
4極簡(jiǎn)部署,操縱如臂使指
支持手柄/鍵盤(pán)雙模控制,兼容無(wú)線(xiàn)手柄即插即用;內(nèi)置可視化UI界面,實(shí)時(shí)同步畫(huà)面與設(shè)備狀態(tài),指令下達(dá)、狀態(tài)監(jiān)控一目了然。
5多重防護(hù),安全智能兼?zhèn)?/strong>
搭載360°激光雷達(dá)實(shí)時(shí)掃描,結(jié)合動(dòng)態(tài)避障系統(tǒng),遇障絲滑繞行,復(fù)雜場(chǎng)景也能靈活穿梭!裝配工業(yè)級(jí)安全防撞條和炫彩車(chē)燈示警系統(tǒng),即使在人員活動(dòng)密集、多設(shè)備運(yùn)轉(zhuǎn)的高密度復(fù)雜環(huán)境中也能確保操作安全。
6高效續(xù)航,工作穩(wěn)定進(jìn)行
配備更加安全可靠的磷酸鐵鋰電池組,可支持最高3小時(shí)連續(xù)作業(yè);選配快速更換備用電池提升作業(yè)連續(xù)性,更可選配自動(dòng)回充模塊,低電量自主尋樁歸位,真正實(shí)現(xiàn)全天候無(wú)人值守運(yùn)行。
7超強(qiáng)適配,靈活應(yīng)對(duì)任務(wù)
myAGV Pro可搭載多種機(jī)械臂,提供構(gòu)建具身智能訓(xùn)練與固定場(chǎng)景自動(dòng)化作業(yè)一體化解決方案。
三大應(yīng)用場(chǎng)景
1教育科研與競(jìng)賽
myAGV Pro的全向麥輪系統(tǒng)與高性能電機(jī)使其運(yùn)動(dòng)性能躍升至1.5m/s極速,自重僅40kg,負(fù)載能力高達(dá)50kg,輕松承載協(xié)作機(jī)械臂開(kāi)展復(fù)合機(jī)器人實(shí)訓(xùn);原生搭載的ROS2 Humble深度集成Gmapping/ Cartographer/ RTAB-MAP 等Slam算法庫(kù),結(jié)合預(yù)裝Ubuntu 22.04系統(tǒng),讓編程與SLAM建圖研究效率倍增,從教學(xué)實(shí)驗(yàn)到科研團(tuán)隊(duì)算法開(kāi)發(fā),軟件與性能再無(wú)妥協(xié)。
2創(chuàng)意開(kāi)發(fā)
在延續(xù)模塊化基因基礎(chǔ)上,myAGV Pro實(shí)現(xiàn)三重進(jìn)化:Jetson Orin Nano算力支持實(shí)時(shí)多目標(biāo)識(shí)別與語(yǔ)音交互開(kāi)發(fā);360°激光雷達(dá)+3D視覺(jué)相機(jī)構(gòu)建毫米級(jí)環(huán)境感知網(wǎng)絡(luò);開(kāi)放Python/C++/ROS2全協(xié)議控制接口,開(kāi)發(fā)者可自由調(diào)用數(shù)據(jù)。無(wú)論是構(gòu)建智能倉(cāng)儲(chǔ)原型還是模擬調(diào)試服務(wù)機(jī)器人,myAGV Pro都能成為創(chuàng)意落地的加速器。
3商業(yè)探索
憑借專(zhuān)業(yè)級(jí)安全架構(gòu)和性能釋放,myAGV Pro足以滿(mǎn)足復(fù)雜商業(yè)項(xiàng)目的預(yù)研需求。高效續(xù)航支持無(wú)人值守模擬倉(cāng)儲(chǔ)物流分揀;直連協(xié)作機(jī)械臂能夠精準(zhǔn)復(fù)現(xiàn)貨架搬運(yùn)全流程;激光雷達(dá)和動(dòng)態(tài)避障系統(tǒng)可直觀演示不同地形通行邏輯——以教育級(jí)的價(jià)格,提供工業(yè)級(jí)的場(chǎng)景驗(yàn)證能力。
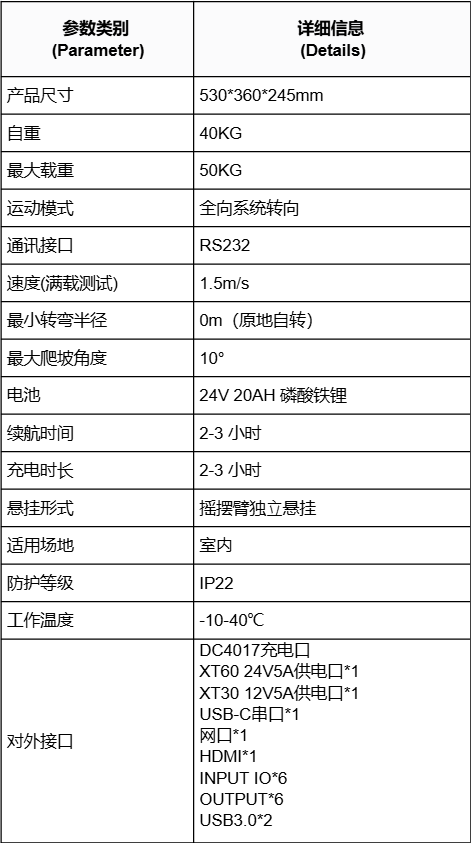
產(chǎn)品參數(shù)
myAGV Pro,用更高效的移動(dòng)復(fù)合機(jī)器人解決方案,讓創(chuàng)新從此刻開(kāi)始運(yùn)轉(zhuǎn)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29653瀏覽量
212328 -
機(jī)械臂
+關(guān)注
關(guān)注
13文章
553瀏覽量
25323 -
大象機(jī)器人
+關(guān)注
關(guān)注
0文章
86瀏覽量
93
原文標(biāo)題:新品發(fā)布 | 大象機(jī)器人myAGV Pro —— 探索更高效的移動(dòng)復(fù)合機(jī)器人解決方案
文章出處:【微信號(hào):ElephantRobotics,微信公眾號(hào):大象機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
復(fù)合機(jī)器人是通過(guò)什么導(dǎo)航方式?

富唯智能最小復(fù)合機(jī)器人的強(qiáng)大抓取實(shí)力?

復(fù)合機(jī)器人能滿(mǎn)足多少毫米級(jí)的定位?
復(fù)合機(jī)器人抓取精度的影響因素及提升策略
大象機(jī)器人推出myAGV復(fù)合機(jī)器人智慧物流套裝
軟通天樞發(fā)布軟通天匯復(fù)合機(jī)器人系列產(chǎn)品
大象機(jī)器人以科技治愈人心
多功能復(fù)合機(jī)器人設(shè)計(jì)方案

一臺(tái)復(fù)合機(jī)器人需要多少錢(qián)?

復(fù)合機(jī)器人:開(kāi)啟智能倉(cāng)儲(chǔ)新篇章

智能移動(dòng)機(jī)器人

復(fù)合機(jī)器人倉(cāng)庫(kù)搬運(yùn)方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論