 【開發實例】基于BPI-CanMV-K230D-Zero開發板實現人體關鍵點的實時動態識別
【開發實例】基于BPI-CanMV-K230D-Zero開發板實現人體關鍵點的實時動態識別

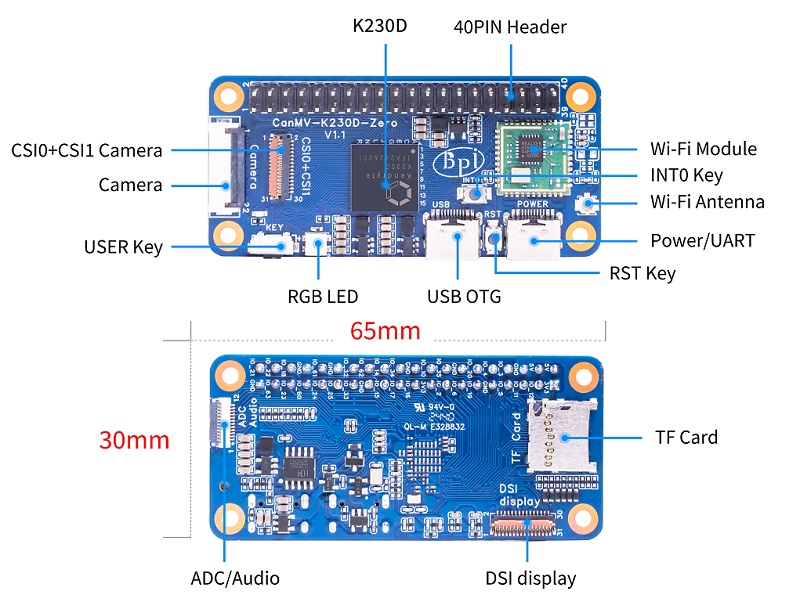
本文介紹了香蕉派 CanMV K230D Zero 開發板通過攝像頭實現人體關鍵點的實時動態檢測識別的項目設計。
https://bbs.elecfans.com/jishu_2493481_1_1.html
項目介紹
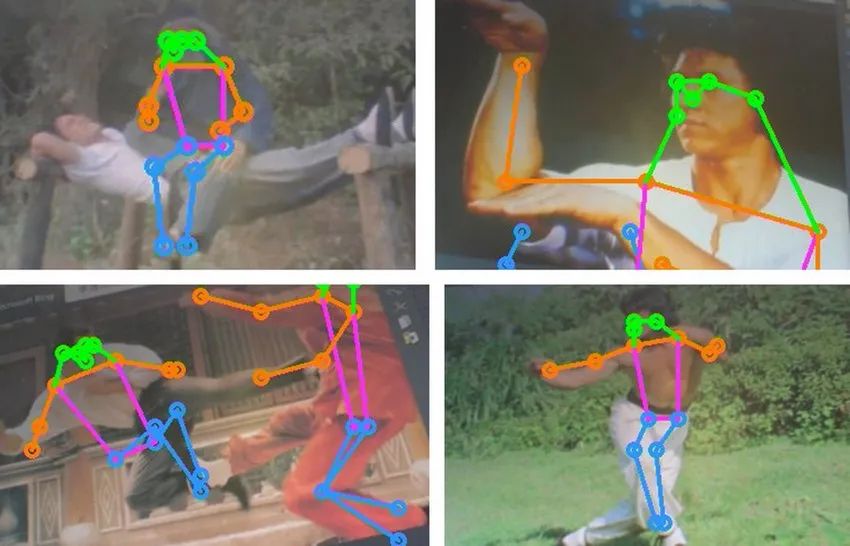
- 人體關鍵點檢測應用使用 YOLOv8n-pose 模型對人體姿態進行檢測;
- 檢測結果得到 17 個人體骨骼關鍵點的位置,并用不同顏色的線將關鍵點連起來在屏幕顯示。
17 個人體骨骼關鍵點包括:鼻子、左眼、右眼、左耳、右耳、左肩、右肩、左肘、右肘、左腕、右手腕、左髖關節、右髖關節、左膝、右膝蓋、左腳踝、右腳踝。
模型官方文檔詳見:COCO8 Pose 數據集 -Ultralytics YOLO 文檔.
模型訓練過程詳見:訓練部署YOLOv8姿態估計模型 | Seeed Studio Wiki.
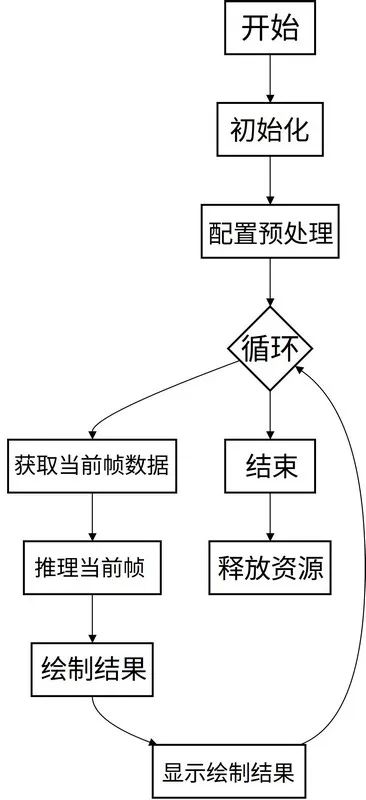
流程圖
代碼
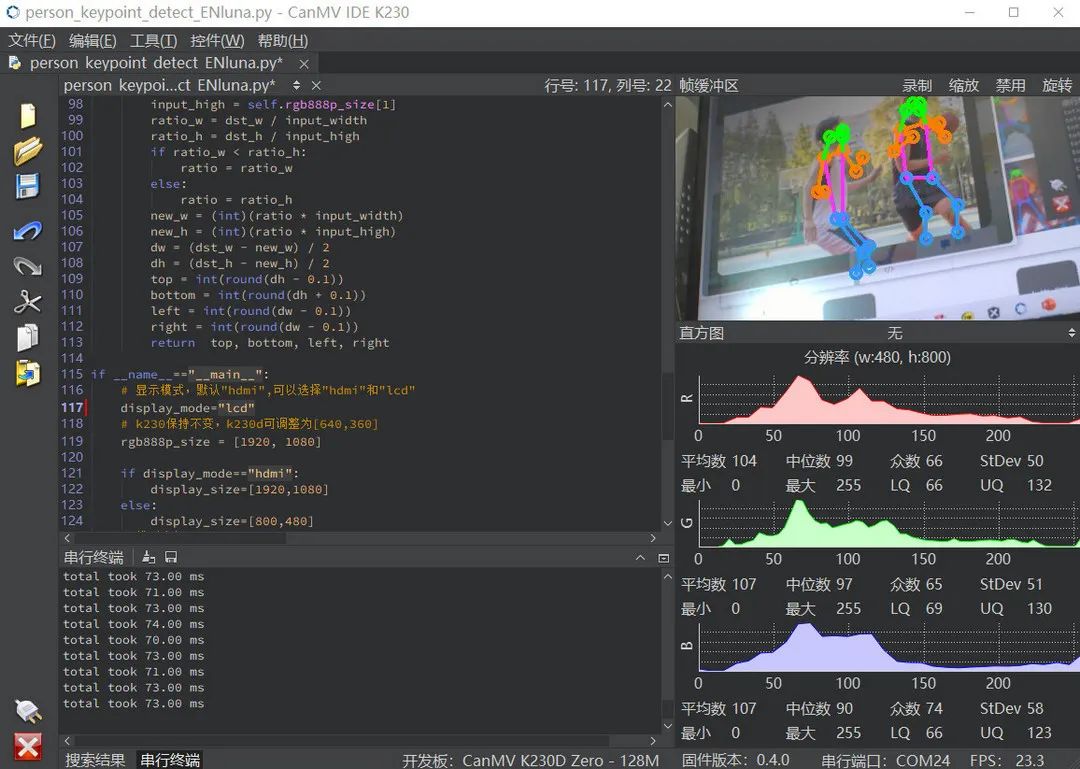
使用CanMV IDE打開\CanMV\sdcard\examples\05-AI-Demo\person_keypoint_detect.py文件
fromlibs.PipeLineimportPipeLine, ScopedTiming
fromlibs.AIBaseimportAIBase
fromlibs.AI2DimportAi2d
importos
importujson
frommedia.mediaimport*
fromtimeimport*
importnncase_runtimeasnn
importulab.numpyasnp
importtime
importutime
importimage
importrandom
importgc
importsys
importaidemo
# 自定義人體關鍵點檢測類
classPersonKeyPointApp(AIBase):
def__init__(self,kmodel_path,model_input_size,confidence_threshold=0.2,nms_threshold=0.5,rgb888p_size=[1280,720],display_size=[1920,1080],debug_mode=0):
super().__init__(kmodel_path,model_input_size,rgb888p_size,debug_mode)
self.kmodel_path=kmodel_path
# 模型輸入分辨率
self.model_input_size=model_input_size
# 置信度閾值設置
self.confidence_threshold=confidence_threshold
# nms閾值設置
self.nms_threshold=nms_threshold
# sensor給到AI的圖像分辨率
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 顯示分辨率
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
self.debug_mode=debug_mode
#骨骼信息
self.SKELETON = [(16,14),(14,12),(17,15),(15,13),(12,13),(6, 12),(7, 13),(6, 7),(6, 8),(7, 9),(8, 10),(9, 11),(2, 3),(1, 2),(1, 3),(2, 4),(3, 5),(4, 6),(5, 7)]
#肢體顏色
self.LIMB_COLORS = [(255,51, 153,255),(255,51, 153,255),(255,51, 153,255),(255,51, 153,255),(255,255,51, 255),(255,255,51, 255),(255,255,51, 255),(255,255,128,0),(255,255,128,0),(255,255,128,0),(255,255,128,0),(255,255,128,0),(255,0, 255,0),(255,0, 255,0),(255,0, 255,0),(255,0, 255,0),(255,0, 255,0),(255,0, 255,0),(255,0, 255,0)]
#關鍵點顏色,共17個
self.KPS_COLORS = [(255,0, 255,0),(255,0, 255,0),(255,0, 255,0),(255,0, 255,0),(255,0, 255,0),(255,255,128,0),(255,255,128,0),(255,255,128,0),(255,255,128,0),(255,255,128,0),(255,255,128,0),(255,51, 153,255),(255,51, 153,255),(255,51, 153,255),(255,51, 153,255),(255,51, 153,255),(255,51, 153,255)]
# Ai2d實例,用于實現模型預處理
self.ai2d=Ai2d(debug_mode)
# 設置Ai2d的輸入輸出格式和類型
self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT,nn.ai2d_format.NCHW_FMT,np.uint8, np.uint8)
# 配置預處理操作,這里使用了pad和resize,Ai2d支持crop/shift/pad/resize/affine,具體代碼請打開/sdcard/app/libs/AI2D.py查看
defconfig_preprocess(self,input_image_size=None):
withScopedTiming("set preprocess config",self.debug_mode >0):
# 初始化ai2d預處理配置,默認為sensor給到AI的尺寸,您可以通過設置input_image_size自行修改輸入尺寸
ai2d_input_size=input_image_sizeifinput_image_sizeelseself.rgb888p_size
top,bottom,left,right=self.get_padding_param()
self.ai2d.pad([0,0,0,0,top,bottom,left,right],0, [0,0,0])
self.ai2d.resize(nn.interp_method.tf_bilinear, nn.interp_mode.half_pixel)
self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]],[1,3,self.model_input_size[1],self.model_input_size[0]])
# 自定義當前任務的后處理
defpostprocess(self,results):
withScopedTiming("postprocess",self.debug_mode >0):
# 這里使用了aidemo庫的person_kp_postprocess接口
results = aidemo.person_kp_postprocess(results[0],[self.rgb888p_size[1],self.rgb888p_size[0]],self.model_input_size,self.confidence_threshold,self.nms_threshold)
returnresults
#繪制結果,繪制人體關鍵點
defdraw_result(self,pl,res):
withScopedTiming("display_draw",self.debug_mode >0):
ifres[0]:
pl.osd_img.clear()
kpses = res[1]
foriinrange(len(res[0])):
forkinrange(17+2):
if(k 17):
kps_x,kps_y,kps_s =round(kpses[i][k][0]),round(kpses[i][k][1]),kpses[i][k][2]
kps_x1 =int(float(kps_x) * self.display_size[0] // self.rgb888p_size[0])
kps_y1 =int(float(kps_y) * self.display_size[1] // self.rgb888p_size[1])
if(kps_s >0):
pl.osd_img.draw_circle(kps_x1,kps_y1,5,self.KPS_COLORS[k],4)
ske = self.SKELETON[k]
pos1_x,pos1_y=round(kpses[i][ske[0]-1][0]),round(kpses[i][ske[0]-1][1])
pos1_x_ =int(float(pos1_x) * self.display_size[0] // self.rgb888p_size[0])
pos1_y_ =int(float(pos1_y) * self.display_size[1] // self.rgb888p_size[1])
pos2_x,pos2_y =round(kpses[i][(ske[1] -1)][0]),round(kpses[i][(ske[1] -1)][1])
pos2_x_ =int(float(pos2_x) * self.display_size[0] // self.rgb888p_size[0])
pos2_y_ =int(float(pos2_y) * self.display_size[1] // self.rgb888p_size[1])
pos1_s,pos2_s = kpses[i][(ske[0] -1)][2],kpses[i][(ske[1] -1)][2]
if(pos1_s >0.0andpos2_s >0.0):
pl.osd_img.draw_line(pos1_x_,pos1_y_,pos2_x_,pos2_y_,self.LIMB_COLORS[k],4)
gc.collect()
else:
pl.osd_img.clear()
# 計算padding參數
defget_padding_param(self):
dst_w = self.model_input_size[0]
dst_h = self.model_input_size[1]
input_width = self.rgb888p_size[0]
input_high = self.rgb888p_size[1]
ratio_w = dst_w / input_width
ratio_h = dst_h / input_high
ifratio_w < ratio_h:
ratio = ratio_w
else:
ratio = ratio_h
new_w = (int)(ratio * input_width)
new_h = (int)(ratio * input_high)
dw = (dst_w - new_w) /2
dh = (dst_h - new_h) /2
top =int(round(dh -0.1))
bottom =int(round(dh +0.1))
left =int(round(dw -0.1))
right =int(round(dw -0.1))
return top, bottom, left, right
if__name__=="__main__":
# 顯示模式,默認"hdmi",可以選擇"hdmi"和"lcd"
display_mode="hdmi"
# k230保持不變,k230d可調整為[640,360]
rgb888p_size = [1920,1080]
ifdisplay_mode=="hdmi":
display_size=[1920,1080]
else:
display_size=[800,480]
# 模型路徑
kmodel_path="/sdcard/examples/kmodel/yolov8n-pose.kmodel"
# 其它參數設置
confidence_threshold =0.2
nms_threshold =0.5
# 初始化PipeLine
pl=PipeLine(rgb888p_size=rgb888p_size,display_size=display_size,display_mode=display_mode)
pl.create()
# 初始化自定義人體關鍵點檢測實例
person_kp=PersonKeyPointApp(kmodel_path,model_input_size=[320,320],confidence_threshold=confidence_threshold,nms_threshold=nms_threshold,rgb888p_size=rgb888p_size,display_size=display_size,debug_mode=0)
person_kp.config_preprocess()
whileTrue:
withScopedTiming("total",1):
# 獲取當前幀數據
img=pl.get_frame()
# 推理當前幀
res=person_kp.run(img)
# 繪制結果到PipeLine的osd圖像
person_kp.draw_result(pl,res)
# 顯示當前的繪制結果
pl.show_image()
gc.collect()
person_kp.deinit()
pl.destroy()
連接開發板并運行代碼;
將攝像頭對準目標檢測畫面,即可在 IDE 獲取實時識別效果。
效果
運動場景

科幻電影
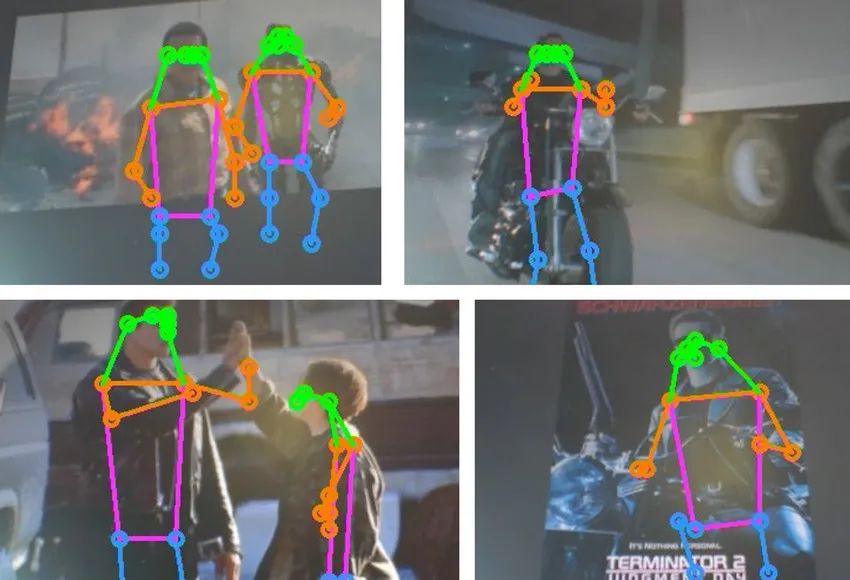
動作電影
動態識別效果詳見頂部和底部視頻。
總結
本文介紹了香蕉派 CanMV K230D Zero 開發板通過攝像頭實現人體關鍵點的實時動態檢測和識別的項目設計,為相關產品的快速開發和產品設計提供了參考。
-
攝像頭
+關注
關注
61文章
4970瀏覽量
98214 -
開發板
+關注
關注
25文章
5656瀏覽量
104255 -
動態識別模塊
+關注
關注
0文章
2瀏覽量
869
發布評論請先 登錄
香蕉派 BPI-CanMV-K230D-Zero 采用嘉楠科技 K230D RISC-V芯片設計
香蕉派開發板BPI-CanMV-K230D-Zero 嘉楠科技 RISC-V開發板公開發售
Banana Pi BPI-CanMV-K230D-Zero :AIoT 應用的 Kendryte K230D RISC-V
【BPI-CanMV-K230D-Zero開發板體驗】香蕉派 K230D 視覺開發板開箱+CamMV 環境搭建
【BPI-CanMV-K230D-Zero開發板體驗】介紹、系統安裝、工程測試
【BPI-CanMV-K230D-Zero開發板體驗】+初品嘉楠科技產品
【BPI-CanMV-K230D-Zero開發板體驗】01_開箱+環境配置+系統燒錄
【BPI-CanMV-K230D-Zero開發板體驗】+燈效控制與Python編程
【BPI-CanMV-K230D-Zero開發板體驗】人體關鍵點檢測
【BPI-CanMV-K230D-Zero開發板體驗】+ADC數據采集及尋找引腳的問題
【BPI-CanMV-K230D-Zero開發板體驗】+串口通訊及應用
【BPI-CanMV-K230D-Zero開發板體驗】+TFT屏顯示驅動及信息顯示
Banana Pi BPI-CanMV-K230D-Zero 采用嘉楠科技 K230D RISC-V芯片設計
香蕉派開發板BPI-CanMV-K230D-Zero 嘉楠科技 RISC-V開發板公開發售
搭載雙核玄鐵C908 ?RISC-V CPU,BPI-CanMV-K230D-Zero開發板試用






 工商網監
工商網監
評論