") 2013_紅外智能尋線測(cè)距小車
2013_紅外智能尋線測(cè)距小車
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
紅外
+關(guān)注
關(guān)注
8文章
759瀏覽量
95565 -
超聲波
+關(guān)注
關(guān)注
63文章
3116瀏覽量
140037
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
【硬核項(xiàng)目】STM32F103 智能小車全棧開發(fā):紅外循跡 / 避障算法 + WiFi 遠(yuǎn)程控制,附原理圖與代碼
今天為大家推薦一款功能強(qiáng)大的STM32多功能智能小車——華清遠(yuǎn)見STM32F103智能云控小車。這款小車集
【零基礎(chǔ)逆襲軟硬件工程師】華清遠(yuǎn)見STM32F103智能小車開發(fā)實(shí)戰(zhàn),手把手帶你從硬件組裝到WiFi遠(yuǎn)程控制,解鎖
STM32F103智能云控小車是由華清遠(yuǎn)見傾力打造的一款多功能智能小車,專為高校教學(xué)、學(xué)生畢業(yè)設(shè)計(jì)、創(chuàng)新競(jìng)賽、單片機(jī)入門學(xué)習(xí)及項(xiàng)目實(shí)踐量身定制。這款

紅外感應(yīng)技術(shù)的工作原理
的檢測(cè)和識(shí)別。
紅外感應(yīng)器的原理
紅外感應(yīng)器作為紅外感應(yīng)技術(shù)的關(guān)鍵組件,通過(guò)檢測(cè)周圍環(huán)境中的紅外輻射,可以實(shí)現(xiàn)人體、物體等目標(biāo)的智能識(shí)別與控
發(fā)表于 02-17 18:26
工業(yè)智能網(wǎng)關(guān)助力AGV小車數(shù)據(jù)采集
在工業(yè)自動(dòng)化程度日益提升的當(dāng)下,AGV 小車已成為物流運(yùn)輸和生產(chǎn)制造的關(guān)鍵設(shè)備。要實(shí)現(xiàn)其智能化管理與高效運(yùn)行,精準(zhǔn)全面的數(shù)據(jù)采集必不可少。工業(yè)智能網(wǎng)關(guān)作為連接設(shè)備與上層系統(tǒng)的橋梁,在 AGV
畢業(yè)設(shè)計(jì)競(jìng)賽選題推薦 | 鴻蒙物聯(lián)網(wǎng)應(yīng)用之智能測(cè)距儀項(xiàng)目實(shí)戰(zhàn)(含文檔及源碼)
01引言在工程測(cè)量、建筑施工、室內(nèi)裝潢以及地理信息系統(tǒng)等領(lǐng)域,精確的距離測(cè)量是至關(guān)重要的。智能測(cè)距儀項(xiàng)目以其先進(jìn)的技術(shù),為這些領(lǐng)域帶來(lái)了革命性的改變。它不僅提高了測(cè)量的準(zhǔn)確性和效率,還通過(guò)智能
精訊暢通發(fā)布新一代激光測(cè)距模塊,引領(lǐng)智能測(cè)距新紀(jì)元
化、自動(dòng)化控制不可或缺的基石。 然而,傳統(tǒng)的測(cè)距技術(shù),如超聲波測(cè)距和紅外測(cè)距,盡管在一定程度上滿足了部分應(yīng)用場(chǎng)景的需求,但在精度、抗干擾能力以及環(huán)境適應(yīng)性等方面仍存在明顯的局限性。面對(duì)
紅外感應(yīng)在智能照明中的具體應(yīng)用
一款國(guó)產(chǎn)A/D型具有增強(qiáng)型1T8051內(nèi)核8位高性能Flash的接近感應(yīng)單片機(jī)XD08M3232,因其性能優(yōu)越而受到用戶的青睞。在智能照明系統(tǒng)中,XD08M3232紅外感應(yīng)單片機(jī)可以發(fā)揮重要作用
發(fā)表于 12-12 18:21
高分辨中紅外單光子測(cè)距系統(tǒng)原理分析
據(jù)麥姆斯咨詢報(bào)道,近日,華東師范大學(xué)精密光譜科學(xué)與技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室黃坤研究員與曾和平教授團(tuán)隊(duì)在中紅外單光子測(cè)距方面取得進(jìn)展,研制了具有單光子靈敏度、高測(cè)距分辨率和大動(dòng)態(tài)范圍的中紅外上

PSF-TM5DNO紅外光電開關(guān)測(cè)距原理和方法
紅外光電開關(guān)測(cè)距具有高精度、快速響應(yīng)、適用范圍廣等優(yōu)點(diǎn),但也存在價(jià)格較高、探測(cè)距離限制、易受干擾以及對(duì)反射物體敏感等缺點(diǎn)。在選擇和使用時(shí),需要根據(jù)具體的應(yīng)用需求和工作環(huán)境進(jìn)行綜合考慮。
自適應(yīng)藍(lán)牙控制智能小車
、火災(zāi)現(xiàn)場(chǎng)、甚至是戰(zhàn)場(chǎng)。這時(shí)如果使用智能機(jī)器人進(jìn)行環(huán)境探測(cè)或者現(xiàn)場(chǎng)勘探,付出的代價(jià)成本會(huì)小很多。如今出現(xiàn)了無(wú)人機(jī),無(wú)人小車,無(wú)人艦艇等等。這些設(shè)備的誕生都是為了解決特殊領(lǐng)域的需求。
本系統(tǒng)是一款硬件上
發(fā)表于 10-07 23:08
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析
第13章-循跡功能 循跡小車講解 原理分析 STM32智能小車循跡教程 紅外對(duì)管使用 PID循跡算法分析V3:HAL庫(kù)開發(fā)、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、P

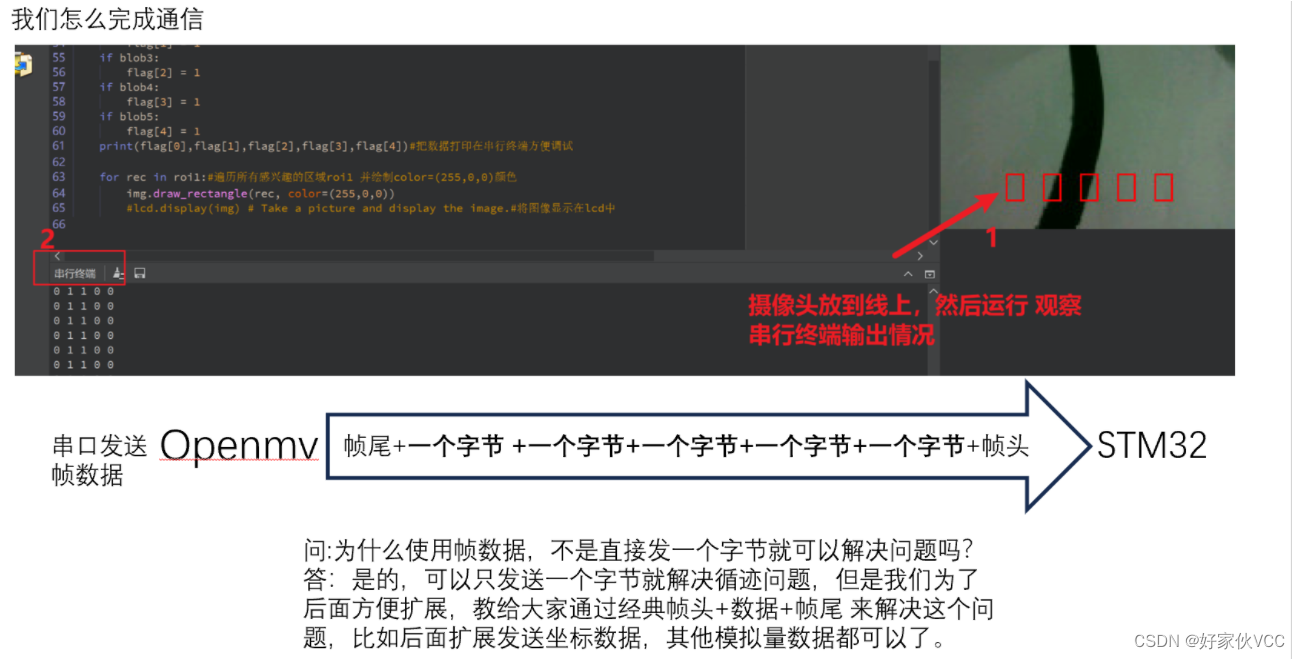
19.3-星曈科技 openmv Hopenmv發(fā)送五個(gè)uchar Openmv+STM32F103C8T6視覺(jué)巡線小車 STM32循跡小車系列教程
19.3-【星曈科技】openmv Hopenmv發(fā)送五個(gè)uchar Openmv+STM32F103C8T6視覺(jué)巡線小車 STM32循跡小車系列教程 使用OpenMV循跡 openMV尋跡與
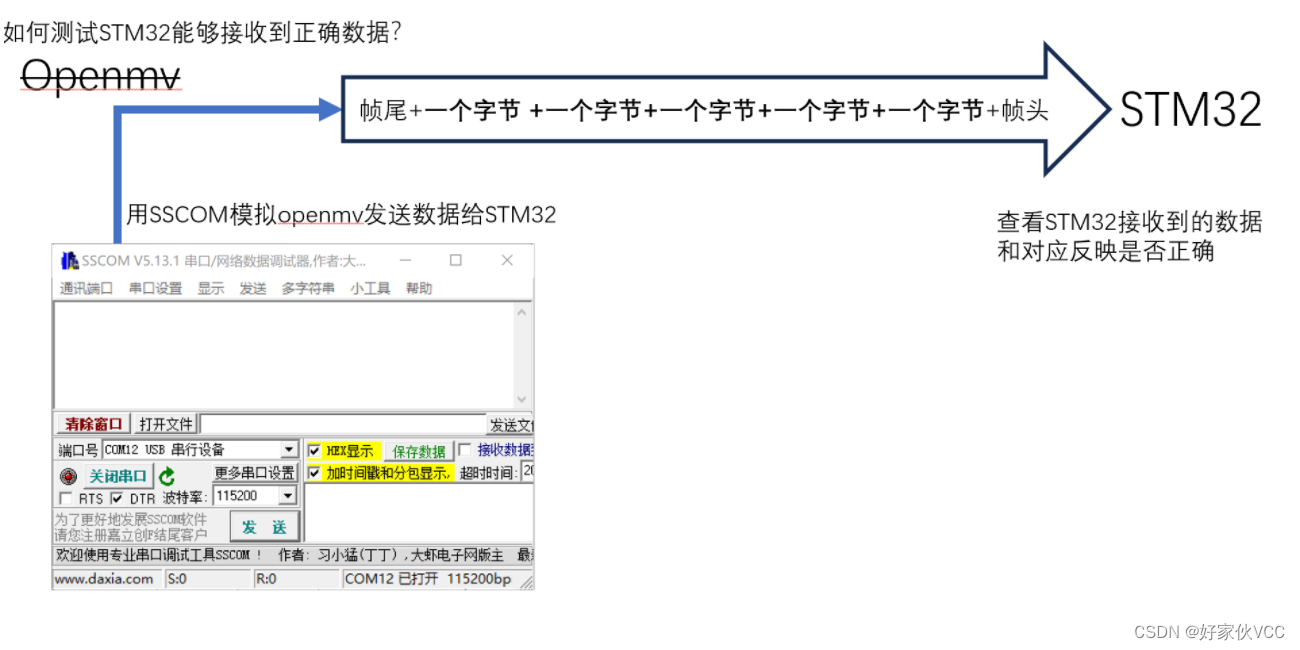
19.4-STM32接收數(shù)據(jù)-狀態(tài)顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺(jué)巡線小車
19.4-STM32接收數(shù)據(jù)-狀態(tài)顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺(jué)巡線小車
20.3-使用兩個(gè)通道進(jìn)行電磁循跡 智能車競(jìng)賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法
20.3-使用兩個(gè)通道進(jìn)行電磁循跡 智能車競(jìng)賽 電磁桿原理圖 電磁循跡小車 智能車電磁組 STM32電磁小車 電磁循跡小車 電磁循跡算法

第七章-V1.5 STM32超聲波測(cè)距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測(cè)距
5STM32超聲波測(cè)距STM32F103C8t6超聲波避障小車






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論