") 研究PAT模塊的設(shè)計機理 解析設(shè)計要點
研究PAT模塊的設(shè)計機理 解析設(shè)計要點

該文從電動執(zhí)行機構(gòu)的機理和現(xiàn)場應(yīng)用存在的問題出發(fā),重點介紹了針對傳統(tǒng)電動執(zhí)行機構(gòu)技術(shù)改造的位置調(diào)整模塊的設(shè)計要點。
引言
傳統(tǒng)的電動執(zhí)行機構(gòu)具有使用簡單、節(jié)省投資等特點,已被廣泛應(yīng)用于電力、冶金、石油、輕工等領(lǐng)域的生產(chǎn)過程控制系統(tǒng)中。我國的電動執(zhí)行機構(gòu)和伺服放大器是60年代統(tǒng)一設(shè)計的,30多年來在技術(shù)上沒有大的創(chuàng)新。這種電動執(zhí)行機構(gòu)控制能力差,維護量大,連接電纜多,難于滿足我國工業(yè)自動化水平的需要。
目前,絕大多數(shù)電動執(zhí)行機構(gòu)配套的伺服放大部分通常是由輸入隔離放大電路、比較、觸發(fā)電路和功率輸出電路組成的。輸入一般用線圈隔離,再用磁放大器放大;比較電路一般采用由分立元件組成的電壓比較器,觸發(fā)電路采用張馳振蕩觸發(fā)電路,其穩(wěn)定性、可靠性均較差;功率輸出電路是用可控硅輸出電路,伺服電機轉(zhuǎn)速是固定的,輸出定位效果較差。該類電動執(zhí)行機構(gòu)在控制過程中不能獲得其本身的一些特性參數(shù),使得控制精度與可靠性均不高,可輸入信號僅為一種,如電流或電阻,然后將檢測信號與輸入信號進行比較,由此獲得的控制信號送到 驅(qū)動電路,以控制執(zhí)行機構(gòu)的位移輸出;有些電動執(zhí)行機構(gòu)中雖設(shè)置了報警電路,但沒有采用連鎖保護措施,使得在報警狀態(tài)下仍然存在不安全性,因而此類伺服放大部分控制的電動執(zhí)行機構(gòu)在一些精度、可靠性和穩(wěn)定性要求較高的場合不能適用。

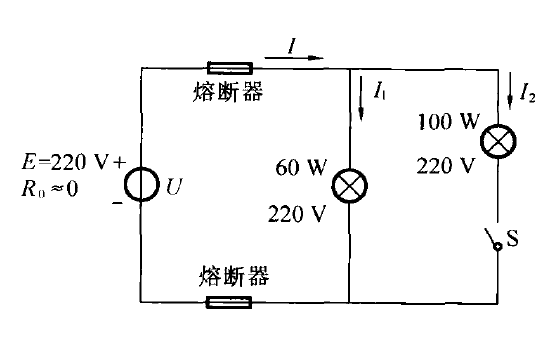
圖1電動執(zhí)行機構(gòu)電路圖
如何通過集散控制系統(tǒng)(簡稱DCS)實現(xiàn)對現(xiàn)場電動執(zhí)行機構(gòu)的高精度的平穩(wěn)操作,是許多工礦企業(yè)技改項目需要考慮的問題。文中以浙大中控的JX-300XDCS為例,針對國產(chǎn)常用的電動執(zhí)行機構(gòu),介紹如何設(shè)計位置調(diào)整模塊(Position Adjusting Type Mod-ule,簡稱PAT模塊),實現(xiàn)電動執(zhí)行機構(gòu)的閉環(huán)控制,提高閥門的定位精度和安全性,同時也簡化操作。
1PAT模塊的設(shè)計機理
PAT模塊是為電動執(zhí)行機構(gòu)而特殊設(shè)計的,取代了傳統(tǒng)的伺服放大器,可以看成是控制精度更高、功能更完善、更先進,安全可靠且與DCS集成一體的新型伺服放大器。
1.1PAT模塊硬件設(shè)計
電動執(zhí)行機構(gòu)一般提供5個信號點:1個模擬量信號,用以反饋電動執(zhí)行機構(gòu)的位置信號;2個開關(guān)量觸點輸入信號,用以反饋電動執(zhí)行機構(gòu)的2個極限報警信號;另外還有2個正反轉(zhuǎn)線圈的驅(qū)動接口,用于聯(lián)接功率器件,如固態(tài)繼電器可控硅之類,伺放或PAT模塊就可以通過開關(guān)量輸出信號,驅(qū)動固態(tài)繼電器或可控硅,從而驅(qū)動電動執(zhí)行機構(gòu)的正轉(zhuǎn)或反轉(zhuǎn)。
電動執(zhí)行機構(gòu)應(yīng)用的場合一般來說比較惡劣,而且在工業(yè)現(xiàn)場為了工程實施方便,閥位反饋信號線、供電線以及開關(guān)量輸出信號線集中為同一條電纜,信號線間串?dāng)_嚴(yán)重,因而PAT模塊的硬件必須在隔離、抗干擾以及電磁兼容性方面做嚴(yán)格設(shè)計。 PAT模塊設(shè)計采用了光電隔離技術(shù)和電磁隔離技術(shù),模擬量處理電路單獨隔離,開關(guān)量部分統(tǒng)一隔離。開關(guān)量輸出部分再經(jīng)過固態(tài)繼電器實現(xiàn)弱電和強電的隔離,有效地克服了不同信號之間的干擾;同時再在模擬量處理電路、開關(guān)量電路部分做進一步的信號調(diào)理以及保護措施,此時PAT模塊具有極強的抗干擾能力和良好的電磁兼容性,穩(wěn)定性和可靠性得到明顯提升。
電動執(zhí)行機構(gòu)動作一般比較靈敏,即在較短的時間內(nèi)閥位變化較大,其反饋信號屬于快速變化的模擬量,在設(shè)計模擬信號處理電路時,濾波電路的濾波常數(shù)要盡量小,同時注意選擇快速的A/D芯片,如逐次比較型的A/D芯片,可以快速采樣,做到及時跟蹤閥位的變化,從而保證良好的控制效果。
硬件的連鎖保護具有及時可靠的優(yōu)點,因此在設(shè)計PAT模塊時,使用極限報警信號參與輸出驅(qū)動的連鎖保護:上極限報警輸入?yún)⑴c增輸出硬件連鎖,下極限報警輸入?yún)⑴c減輸出連鎖保護。在閥門到達上極限或下極限的時刻,可以通過硬件直接截斷PAT模塊的增輸出或減輸出,無需CPU進行處理,從而做到了及時可靠。
由于PAT模塊需通過繼電器來驅(qū)動現(xiàn)場電動執(zhí)行機構(gòu),因此繼電器的好壞直接關(guān)系到能否進行正常控制。相對于常用的電磁繼電器來說,固態(tài)繼電器是一種采用固體組件組裝而成的無觸點開關(guān)控制繼電器,其輸入端利用光電耦合器進行隔離,只要很小的電流就可控制其工作。由于輸出部分內(nèi)部無可動部件,所以具有工作可靠、開關(guān)速度快、工作頻率高、壽命長、無電磁干擾等特點。因此,對于調(diào)節(jié) 頻率較高的工作場合,建議采用固態(tài)繼電器。
1.2PAT模塊軟件設(shè)計
1.2.1PAT模塊控制方案設(shè)計
電動執(zhí)行機構(gòu)在控制過程中,一般有3種控制方案可以采用:第1種方案是采用連續(xù)的長脈沖控制,第2種采用全程的步進調(diào)節(jié)控制,第3種就是長脈沖控制和短脈沖步進驅(qū)動相結(jié)合的控制方式。
第1種方案的優(yōu)點是可以快速的調(diào)節(jié),控制算法簡單,只要判斷閥位設(shè)定值Sv和閥位的反饋值Pv之間的差值與死區(qū)DeadZoon之間的關(guān)系:
采用這種控制方案要消除振蕩現(xiàn)象只能靠降低靈敏度增大死區(qū)DeadZoon,而且這里的DeadZoon已經(jīng)不是實際意義的死區(qū),其包含了慣性的成分。現(xiàn)場的控制對靈敏度有一定的要求,因而這種方案的缺陷是很明顯的,建議不予采用。
第2種方案是在電機的轉(zhuǎn)動過程中插入了暫停階段,使調(diào)速系統(tǒng)降速,從而降低系統(tǒng)的慣性,采用這種控制方式,可以很好地消除振蕩現(xiàn)象,控制精度得到很大的提高,但是如果全程采用這種步進驅(qū)動的控制方式進行調(diào)節(jié),調(diào)節(jié)時間也將大大加長,這在工業(yè)使用過程中的很多場合絕對不允許。
第3種控制方案綜合了第1種和第2種控制方案的優(yōu)點。當(dāng)實際閥位值Pv和設(shè)定值Sv兩者之差的絕對值大于En時模塊采用長脈沖驅(qū)動;當(dāng)兩者之差介于閾值En和二分之一死區(qū)DeadZoon用短脈沖步進的控制方式,即模塊輸出Ton時間的短脈沖等待Toff時間,直到閥位值和設(shè)定值之差絕對值小于二分之一死區(qū),即達到控制精度時停止輸出,完成一次控制過程。PAT模塊采用上述控制方案充分利用了系統(tǒng)的慣性和電動執(zhí)行機構(gòu)的特性,有效地克服了電動執(zhí)行機構(gòu)控制過程中出現(xiàn)的過沖和振蕩現(xiàn)象,提高了控制精度。En、Ton、Toff的設(shè)定要合適,以不超過2~3個短脈沖為最佳,這樣可以加快調(diào)節(jié)時間。
1.2.2PAT模塊自適應(yīng)功能設(shè)計
一般電動執(zhí)行機構(gòu)說明書中提到的技術(shù)性能參數(shù),除了死區(qū)、回差、滯后以及工作電壓等外特性外,Ton、Toff、Smin等內(nèi)特性參數(shù)沒有任何介紹。通過PAT模塊自學(xué)習(xí)功能可得到這些電動執(zhí)行機構(gòu)的特性參數(shù),為合理設(shè)定特性參數(shù)提供有力的支持。
自學(xué)習(xí)功能的設(shè)計是基于人工神經(jīng)網(wǎng)絡(luò)原理,采用了反向傳播算法。這一設(shè)計主要源于電動執(zhí)行機構(gòu)的特性參數(shù)在不同的負(fù)載和不同的閥位段 下面會有所改變,PAT模塊判斷出電動執(zhí)行機構(gòu)的控制效果,并根據(jù)控制效果及時修正特性參數(shù),從而達到最佳控制。當(dāng)負(fù)載較大時,相應(yīng)的死區(qū)和閾值比空載的情況要小,Ton較空載情況要長一些,而Toff則要較空載的情況短一些。在這種情況下,PAT模塊能智能地判斷設(shè)定參數(shù)的合理性,并及時調(diào)整,保證達到最優(yōu)控制。
1.2.3PAT模塊增強功能設(shè)計
在實際應(yīng)用中,意外和特殊情況時有發(fā)生,象有的閥門沒有閥位極限限位開關(guān),這時PAT模塊的極限連鎖保護功能就失去了作用。通過判斷模塊正在進行輸出驅(qū)動時,閥位是否有相應(yīng)的變化,判斷出電動執(zhí)行機構(gòu)是否已達到極限或處于堵轉(zhuǎn)狀態(tài)從而可以及時截斷輸出,防止電機燒毀。
電動執(zhí)行機構(gòu)的閥門定位器也是易損器件,閥位反饋線斷線時有發(fā)生。這些意外情況都會導(dǎo)致PAT模塊采集的閥位不能反映實際的閥位值。在實際使用中,電動執(zhí)行機構(gòu)的閥位值作為內(nèi)環(huán)的被控量,而控制的氣體流量或者液體流量等則作為外環(huán)被控量,此時內(nèi)環(huán)處于開路狀態(tài),PAT模塊將自動的閉環(huán)控制切換到硬手操狀態(tài),用戶可以依據(jù)外環(huán)被控量通過PAT模塊實現(xiàn)對電動執(zhí)行機構(gòu)的硬手操,從而保證整個回路的正常工作。
2結(jié)束語
PAT模塊作為浙大中控JX-300XDCS中的一種重要智能模塊,其穩(wěn)定性、可靠性、功能的完備性以及良好的控制效果,已經(jīng)在實際應(yīng)用中得到了充分的證明,特別在鋼鐵行業(yè)和發(fā)電行業(yè)應(yīng)用,其性能得到用戶的認(rèn)可。
-
DCS
+關(guān)注
關(guān)注
20文章
629瀏覽量
51349 -
PAT
+關(guān)注
關(guān)注
0文章
12瀏覽量
9710 -
電動執(zhí)行機構(gòu)
+關(guān)注
關(guān)注
0文章
7瀏覽量
7500
發(fā)布評論請先 登錄
電壓放大器在合成射流高效摻混機理研究中的應(yīng)用
柴油機預(yù)混合燃燒機理的研究
后驅(qū)動技術(shù)在故障注入中的退化機理的研究
C語言要點解析PDF下載
一文解析傳感器的設(shè)計要點
MOSFET的失效機理 —總結(jié)—
NAT與PAT技術(shù)解析
高壓IGBT關(guān)斷狀態(tài)失效的機理研究
電工學(xué)知識要點與習(xí)題解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論