") 詳解TDA5142T中的技術(shù)重點
詳解TDA5142T中的技術(shù)重點

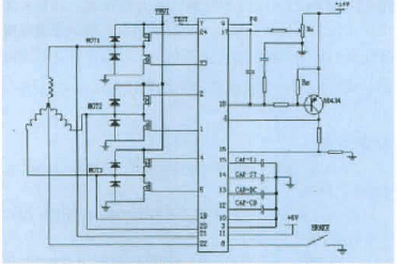
無位置傳感器BLDCM在靜止及低速轉(zhuǎn)動時,反電動勢為零或近似為零,H、L、F態(tài)三者無法通過檢測區(qū)別。如果通過外搭電路實現(xiàn)電機(jī)的平滑起動、電流換相和速度檢測,系統(tǒng)設(shè)計將十分繁瑣,即使設(shè)計成功,系統(tǒng)的效率也很難得到保證。采用TDA5142T芯片,則可大大簡化上述設(shè)計問題,只需選定一個起動電容CAP-ST,即可實現(xiàn)電機(jī)的平滑起動,而且系統(tǒng)響應(yīng)速度快,起動電流小。
TDA5142T主要采用起動振蕩器換相脈沖的激勵方法進(jìn)行起動,振蕩器只在電機(jī)剛起動時工作。一旦反電動勢足夠大,振蕩器立即停止工作,電機(jī)起動完成。剛起動時,從振蕩器產(chǎn)生的每個脈沖都引起TDA5142T的6個輸出腳從一種狀態(tài)轉(zhuǎn)換到另一種狀態(tài),從而激勵電機(jī)運轉(zhuǎn)。如果反電動勢不夠大,電機(jī)將再轉(zhuǎn)一步,并在新的位置下振蕩。為防止脈沖在錯誤的振蕩相位到達(dá),振蕩幅值必須在下個脈沖到達(dá)之前有足夠大的衰減。電機(jī)起動振蕩頻率f和起動電容的選取如下:
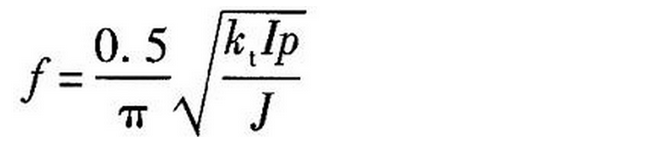
式中,kt為電機(jī)轉(zhuǎn)矩常數(shù),I為電流,p為電機(jī)極對數(shù),J為轉(zhuǎn)子轉(zhuǎn)動慣量,則CAP-ST可按下式選取:

如果電機(jī)轉(zhuǎn)矩常數(shù)和轉(zhuǎn)動慣量不知道,則可以按以下方法選定起動電容:
1)先使CAP-ST=1pF,如果電機(jī)轉(zhuǎn)子不動,則說明起動電容過小,增大1倍的起動電容值,即使CAP-ST=2ptF;
2)如果電機(jī)運轉(zhuǎn)良好,減少1/2的起動電容值,即使CAP-ST=0.5ptF;
3)按照上述的1/2增減法,增大或減少CAP-ST的大小,直至電機(jī)由靜止變?yōu)檗D(zhuǎn)動或由轉(zhuǎn)動變?yōu)殪o止,則最后一次換電容之前的值即為最佳起動電容值。
需要注意的是,起動電容過大,電機(jī)也能正常運轉(zhuǎn),但起動時間將拉長,起動時效率降低。
-
振蕩器
+關(guān)注
關(guān)注
28文章
3979瀏覽量
140638 -
TDA5142
+關(guān)注
關(guān)注
0文章
2瀏覽量
7305 -
BLDCM
+關(guān)注
關(guān)注
0文章
21瀏覽量
14294
發(fā)布評論請先 登錄
AD5142A
AME5142 pdf datasheet (High Ef
康佳T2976K(24C08 TDA9383PS TDA74
TDA5142利用其外部驅(qū)動器可使得電壓達(dá)到30V以驅(qū)動無刷
tda2822m單聲道電路圖原理詳解
ML4425對無位置傳感器電機(jī)驅(qū)動的注意事項

EVAL-AD5142A EVAL-AD5142A評估板
EVAL-AD5142 EVAL-AD5142評估板
MAX5142EUB+T 數(shù)據(jù)采集 - 數(shù)模轉(zhuǎn)換器(DAC)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論