 西門子PLC入門級應用實例:簡易機械手控制
西門子PLC入門級應用實例:簡易機械手控制

進入正題:
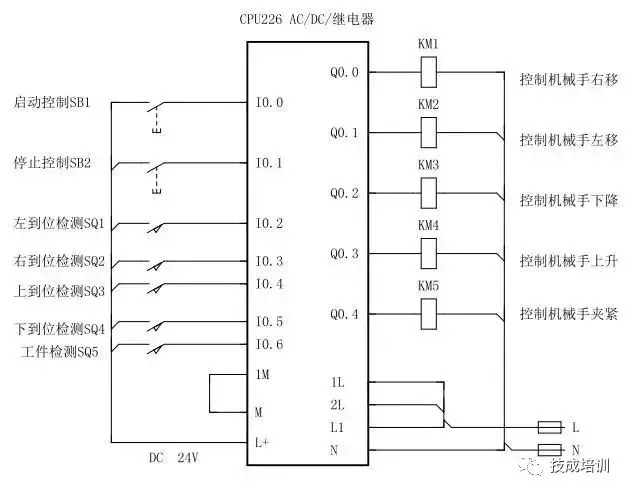
如上圖所示,M1為控制機械手左右移動的電動機,M2為控制機械手上下升降的電動機,YV線圈用來控制機械手夾緊防松,SQ1為左到位檢測開關,SQ2為右到位檢測開關,SQ3為上到位檢測開關,SQ4為下到位檢測開關 ,SQ5為工件檢測開關。
控制要求如下:
1.機械手要將工件從工位A移到工位B處;
2.機械手的初始狀態(原點條件)是機械手應停在工位A的上方,SQ1、SQ3均閉合;
3.若原點條件滿足且SQ5閉合(工件A處有工件),按下啟動按鈕,機械手按“原點→下降→夾緊→上升→右移→下降→防松→上升→左移→原點”的步驟工作。
如下圖所示:
編程前理順動作如何轉移:
定義符號表:
硬件的接線圖:
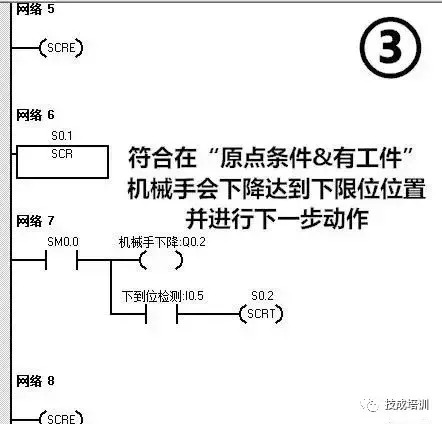
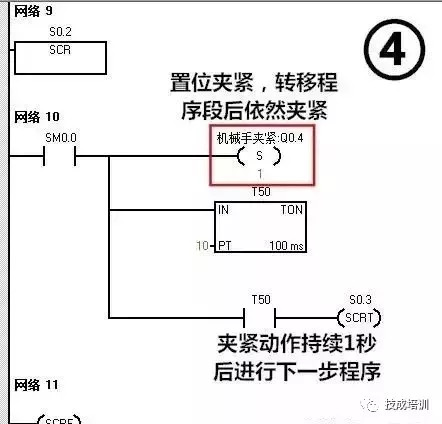
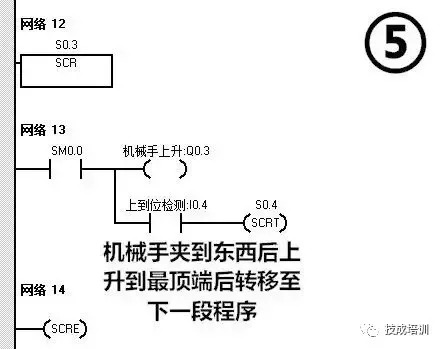
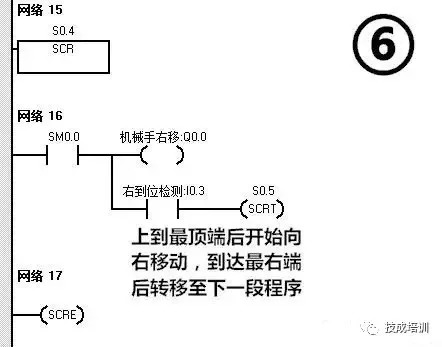
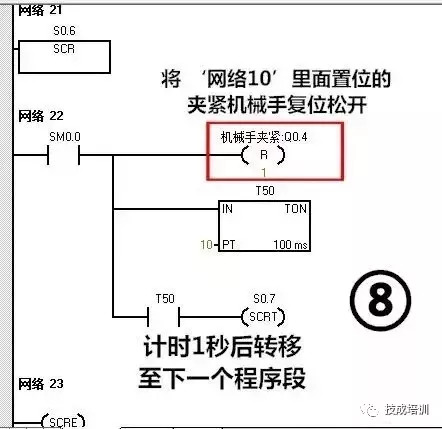
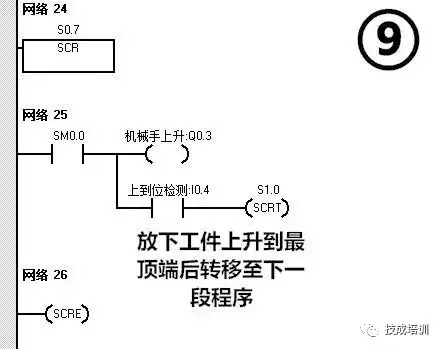
滿足所有動作的程序如下:
下面我們一段一段分析這個機械手是如何工作的:

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
plc
+關注
關注
5031文章
13864瀏覽量
473570 -
西門子
+關注
關注
98文章
3159瀏覽量
118088
原文標題:西門子PLC應用實例:簡易機械手的PLC控制
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦

工業智能網關可以采集西門子PLC嗎
工業智能網關可以采集西門子PLC的數據。物通博聯提供全面接入西門子PLC的數據采集解決方案,其工業智能網關支持多種網絡制式,可采集各種工業設備數據,包括主流
MCGS觸摸屏與西門子S7系列PLC以太網通信
機交互方 式,在工業控制中得到了廣泛的應用。筆者在長期的使 用過程中,發現很多人對于不同型號的 PLC 之間,以及 西門子 PLC 與第三方觸摸屏的數據通信比較陌生,本文 將以具體

PLC邊緣計算網關采集西門子PLC數據過程
提供了一種新的解決方案。 PLC邊緣計算網關采集西門子PLC數據的過程 (一)確定通信方式 首先,需要確定PLC邊緣計算網關與西門子
西門子PLC S7-1500系列介紹
西門子PLCS7-1500系列是西門子自動化領域中的一款重要產品,它以其卓越的性能、強大的功能和高度的靈活性,在工業自動化控制系統中占據了一席之地。本文將詳細介紹西門子

西門子plc200編程實例詳解
西門子PLC S7-200是一款廣泛應用于工業自動化領域的可編程邏輯控制器,其強大的功能和靈活的編程方式使得它能夠滿足各種復雜的控制需求。 一、西門
機械手 OEM 的應用
座椅、儀表盤等。通過精確的動作控制和高效的工作效率,提高汽車生產的質量和速度。像豐田、本田等汽車廠商廣泛應用機械手 OEM 產品來提升生產自動化水平。
電子制造 :電子產品的生產對精度和速度要求極高
發表于 09-18 10:31
西門子中繼器怎么連接plc
西門子中繼器(Siemens Relay)通常用于工業自動化系統中,作為控制和保護設備。在與PLC(可編程邏輯控制器)連接時,需要考慮信號類型、電源要求、接線方式等因素。 1. 了解
西門子PLC數據采集物聯網平臺是什么
西門子PLC數據采集物聯網平臺是西門子公司提供的一個解決方案,用于將可編程邏輯控制器(PLC)和其他工業設備連接到云端,實現數據的采集、分析
西門子plc溫度模塊怎么編程
西門子PLC溫度模塊編程是一個相對復雜的過程,涉及到硬件選擇、接線、配置和編程等多個方面。 一、概述 西門子PLC(Programmable Logic Controller,可編程邏
西門子PLC與NPN、PNP傳感器接線方式,超全講解!
導語:了解西門子PLC與NPN、PNP傳感器的接線方法對于工業自動化控制至關重要。本文將為您詳細介紹西門子PLC的特點、NPN和PNP傳感器
S7協議讀取西門子S7-200 Smart PLC數據
西門子S7-200 Smart PLC因其穩定性和易用性而廣泛應用。通過使用S7協議,可以實現對PLC數據的高效讀取和控制。本文將詳細介紹如何使用S7協議讀取

機器視覺控制機械手的具體過程
機器視覺控制機械手是一種將機器視覺技術與機械手控制技術相結合的自動化技術。它通過機器視覺系統獲取目標物體的圖像信息,然后利用圖像處理技術對圖像進行分析和處理,從而實現對





 工商網監
工商網監
評論