") 詳細(xì)分析車載以太網(wǎng)基礎(chǔ)知識(shí)
詳細(xì)分析車載以太網(wǎng)基礎(chǔ)知識(shí)

眾所周知,汽車無(wú)人駕駛已成為汽車發(fā)展的一種趨勢(shì),它對(duì)汽車ECU系統(tǒng)數(shù)量和質(zhì)量有了更大的需求。目前主流的電子架構(gòu)體系已逐漸顯露出不足,而車載以太網(wǎng)因其具眾多優(yōu)點(diǎn),必然會(huì)在汽車車載網(wǎng)絡(luò)中普遍應(yīng)用。本文將從入門者的角度,講解車載以太網(wǎng)中的重要知識(shí)。
01車載以太網(wǎng)的組成
車載以太網(wǎng)用于連接汽車內(nèi)不同電氣設(shè)備的一種網(wǎng)絡(luò),從而滿足車載環(huán)境中一些特殊需求,它與傳統(tǒng)以太網(wǎng)不盡相同,車載以太網(wǎng)主要由MAC(介質(zhì)訪問(wèn)控制)、PHY(物理接口收發(fā)器)組成,與傳統(tǒng)以太網(wǎng)不同,車載以太網(wǎng)固定為全雙工通信方式,出于對(duì)汽車啟動(dòng)時(shí)間的考慮而沒(méi)有引入自動(dòng)協(xié)商機(jī)制,此外車載以太網(wǎng)是通過(guò)單對(duì)非屏蔽或屏蔽電纜連接,與之對(duì)應(yīng)的100M的MDI接口為100Base-T1,以此滿足EMC要求。
MAC是介質(zhì)訪問(wèn)控制的英文簡(jiǎn)稱,它位于OSI七層模型中數(shù)據(jù)鏈路層的下半部分,主要負(fù)責(zé)控制與連接物理層的物理介質(zhì),它一端通過(guò)PCI總線連接計(jì)算機(jī),另一端通過(guò)MII連接PHY。在發(fā)送數(shù)據(jù)時(shí),MAC協(xié)議會(huì)判斷當(dāng)前是否適合發(fā)送數(shù)據(jù),若能,它會(huì)在將要發(fā)送的數(shù)據(jù)上附加一些控制信息,最終使數(shù)據(jù)以規(guī)定的格式到達(dá)物理層;在接收數(shù)據(jù)時(shí),它會(huì)判斷數(shù)據(jù)是否有錯(cuò)誤,如果沒(méi)有錯(cuò)誤的話,它會(huì)去掉附加的控制信息發(fā)送至LCC(邏輯鏈路控制)子層。
PHY是物理接口收發(fā)器,它實(shí)現(xiàn)了以太網(wǎng)的物理層。PHY在發(fā)送從MAC接收到的數(shù)據(jù)時(shí),會(huì)將該并行數(shù)據(jù)轉(zhuǎn)化成串行數(shù)據(jù),之后再轉(zhuǎn)化為模擬信號(hào)發(fā)送;在接收數(shù)據(jù)時(shí)過(guò)程相反。
02MAC與PHY的接口連接
MAC與PHY之間通過(guò)兩個(gè)接口連接,分別為SMI接口和MII接口。MII是介質(zhì)獨(dú)立接口,以太網(wǎng)MAC通過(guò)該接口發(fā)出數(shù)據(jù)幀經(jīng)過(guò)PHY后傳輸?shù)狡渌W(wǎng)絡(luò)節(jié)點(diǎn)上,同時(shí)其他網(wǎng)絡(luò)節(jié)點(diǎn)的數(shù)據(jù)先經(jīng)過(guò)PHY后再由MAC接收;SMI全稱是串行管理接口,以太網(wǎng)MAC通過(guò)該接口可以訪問(wèn)PHY的寄存器,通過(guò)對(duì)這些寄存器操作可對(duì)PHY進(jìn)行控制和管理。
SMI接口包括MDIO(控制和管理PHY以獲取PHY的狀態(tài))和MDC(為MDIO提供時(shí)鐘)。MDC由MAC提供,MDIO是一根雙向的數(shù)據(jù)線。用來(lái)傳送MAC層的控制信息和物理層的狀態(tài)信息。MDIO數(shù)據(jù)與MDC時(shí)鐘同步,在MDC上升沿有效。
MII接口有MII、RMII、SMII、SSMII、SSSMII、GMII、SGMII、RGMII等。這里簡(jiǎn)要介紹其中的MII和RMII,如下圖所示。
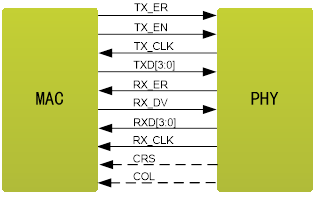
圖1 MII接口
MII共使用了16根線。其中CRS與COL只在半雙工模式有效,而車載以太網(wǎng)固定工作在全雙工模式下,故應(yīng)用在汽車環(huán)境需要14根線。
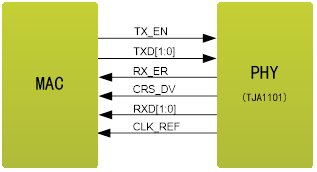
圖2 RMII接口
RMII:精簡(jiǎn)版的MII,數(shù)據(jù)發(fā)送接收均為兩根,相比MII減少了4根,另外它整合或減去了一些線,最終RMII只有8根線。
03PHY的常用功能解讀
3.1PHY的回環(huán)模式
為了診斷以太網(wǎng)工作時(shí)出現(xiàn)的問(wèn)題,需要給問(wèn)題定位,PHY的回環(huán)模式就是起著這樣的作用,回環(huán)是指數(shù)據(jù)從一端發(fā)送經(jīng)過(guò)一段路徑后又回到該端,相當(dāng)于自發(fā)自收,一般PHY都有三種回環(huán)模式,分別為內(nèi)部回環(huán),外部回環(huán)和遠(yuǎn)程回環(huán),它們的回環(huán)路徑不同。下面簡(jiǎn)要介紹下這三種回環(huán)模式。
3.1.1 內(nèi)部回環(huán)
在內(nèi)部回環(huán)模式,PCS接收模塊直接從PCS發(fā)送模塊獲得數(shù)據(jù),如圖3所示。此操作允許MAC將通過(guò)MII發(fā)送功能發(fā)送的數(shù)據(jù)包與從MII接收功能接收的數(shù)據(jù)包進(jìn)行比較,因此,驗(yàn)證100Base-T1 PCS的狀態(tài)。
圖3 內(nèi)部回環(huán)
3.1.2 外部回環(huán)
在外部回環(huán)模式下,PMA接收模塊直接從PMA發(fā)送模塊接收信號(hào),如圖4所示。這種外部回環(huán)測(cè)試允許MAC將通過(guò)MII發(fā)送功能發(fā)送的數(shù)據(jù)包與從MII接收功能接收的數(shù)據(jù)包進(jìn)行比較,因此,驗(yàn)證100Base-T1 PCS和PMA的狀態(tài)。
圖4 外部回環(huán)
3.1.3 遠(yuǎn)程回環(huán)
在遠(yuǎn)程回環(huán)模式下,MDI上鏈接伙伴接收的數(shù)據(jù)包通過(guò)PMA接收和PCS接收模塊傳送到PCS發(fā)送模塊,后者又將其發(fā)送回鏈接伙伴。PCS接收數(shù)據(jù)可在MII上獲得。遠(yuǎn)程回環(huán)允許MAC將發(fā)送到MDI的數(shù)據(jù)包與從MDI接收回的數(shù)據(jù)包進(jìn)行比較,從而驗(yàn)證物理信道的狀態(tài),包括100Base-T1 PHY。如圖5所示。
圖5 遠(yuǎn)程回環(huán)
3.2 PHY的電源模式
為了進(jìn)一步降低系統(tǒng)功耗,一些PHY都支持多種電源模式,主要包括正常模式、待機(jī)模式和睡眠模式。
以太網(wǎng)要正常建立連接,PHY必須處于正常模式,在PHY上電后,一般不會(huì)馬上就工作在正常模式,而是待機(jī)模式。在待機(jī)模式下,PHY的ECU主電源被激活,功耗相對(duì)睡眠模式略高,睡眠模式是PHY工作功耗最低的模式,如果網(wǎng)絡(luò)中暫時(shí)不需要節(jié)點(diǎn)的功能,可使節(jié)點(diǎn)工作在睡眠模式,在睡眠模式下,此時(shí)節(jié)點(diǎn)可斷電整個(gè)ECU,除了喚醒檢測(cè)外,關(guān)閉所有內(nèi)部功能。
-
以太網(wǎng)
+關(guān)注
關(guān)注
41文章
5630瀏覽量
175710 -
無(wú)人駕駛
+關(guān)注
關(guān)注
99文章
4172瀏覽量
123400
原文標(biāo)題:【入門必備】車載以太網(wǎng)基礎(chǔ)知識(shí)
文章出處:【微信號(hào):Zlgmcu7890,微信公眾號(hào):周立功單片機(jī)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄

車載以太網(wǎng)測(cè)試系統(tǒng)測(cè)試實(shí)例介紹#車載以太網(wǎng)

車載以太網(wǎng)基礎(chǔ)培訓(xùn)——物理層簡(jiǎn)介#車載以太網(wǎng)

車載以太網(wǎng)基礎(chǔ)培訓(xùn)——車載以太網(wǎng)的鏈路層#車載以太網(wǎng)

車載以太網(wǎng)基礎(chǔ)培訓(xùn)——網(wǎng)絡(luò)層#車載以太網(wǎng)


車載以太網(wǎng)硬件接口VN5620設(shè)備展示與介紹#車載以太網(wǎng)
以太網(wǎng)口 的bob Smith電路作用
以太網(wǎng)口 的bob Smith電路
詳細(xì)分析車載以太網(wǎng)TSN標(biāo)準(zhǔn)
簡(jiǎn)化您的以太網(wǎng)設(shè)計(jì),第1部分:以太網(wǎng)PHY基礎(chǔ)知識(shí)和選擇過(guò)程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論