 自適應巡航是什么
自適應巡航是什么

自適應巡航控制系統是一種智能化的自動控制系統,它是在早已存在的巡航控制技術的基礎上發展而來的。在車輛行駛過程中,安裝在車輛前部的車距傳感器(雷達)持續掃描車輛前方道路,同時輪速傳感器采集車速信號。
當與前車之間的距離過小時,ACC控制單元可以通過與制動防抱死系統、發動機控制系統協調動作,使車輪適當制動,并使發動機的輸出功率下降,以使車輛與前方車輛始終保持安全距離。
自適應巡航控制(ACC)是一個允許車輛巡航控制系統通過調整速度以適應交通狀況的汽車功能。安裝在車輛前方的雷達用于檢測在本車前進道路上是否存在速度更慢的車輛。若存在速度更慢的車輛,ACC系統會降低車速并控制與前方車輛的間隙或時間間隙。若系統檢測到前方車輛并不在本車行駛道路上時將加快本車速度使之回到之前所設定的速度。此操作實現了在無司機干預下的自主減速或加速。ACC控制車速的主要方式是通過發動機油門控制和適當的制動。
自適應巡航控制系統一般在車速大于25 km/h時才會起作用,而當車速降低到25 km/h以下時,就需要駕駛者進行人工控制。通過系統軟件的升級,自適應巡航控制系統可以實現“停車/起步”功能,以應對在城市中行駛時頻繁的停車和起步情況。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
ACC
+關注
關注
1文章
59瀏覽量
23073 -
巡航控制
+關注
關注
0文章
4瀏覽量
4151
發布評論請先 登錄
相關推薦
熱點推薦
矩陣變換器驅動異步電機模糊自適應PI控制
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:矩陣變換器驅動異步電機模糊自適應PI控制.pdf【免責聲明】本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,刪除內容!
發表于 06-04 14:46
2025年德國市場主流車型ADAS性能評測報告之ACC篇
2025年初,德國《AutoMotorSport》雜志與MdynamiXAG合作,共同評估ADAS的客觀表現,更加強調測試駕駛中獲得的實際體驗。本期雜志內容先從ACC(自適應巡航控制系統)開始,這些

永磁同步電機自適應高階滑模Type-2模糊控制
針對永磁同步電機數學模型不確定問題,提出一種自適應高階滑模Type-2模糊控制方法。采用積分滑模面二階滑模控制律,保持傳統滑模控制的魯棒性并實現不含不確定高階輸入輸出有限時間穩定;不需要預先確定干擾
發表于 03-27 11:54
2025年德國市場主流車型ADAS性能評測報告之ACC篇
與前車的距離的ACC(自適應巡航控制系統)功能開始,后續幾期測試對象還包括泊車輔助系統和主動車道保持系統等。
GLAD應用:大氣像差與自適應光學
概述
激光在大氣湍流中傳輸時會拾取大氣湍流導致的相位畸變,特別是在長距離傳輸的激光通信系統中。這種畸變會使傳輸激光的波前劣化。通過在系統中引入自適應光學系統,可以對激光傳輸時拾取的低頻畸變進行校正
發表于 03-10 08:55
AMD助力斯巴魯提升EyeSight安全系統
AMD 自適應計算技術正為斯巴魯基于視覺的高級駕駛輔助系統( ADAS )—— EyeSight 提供支持。該系統已集成到部分斯巴魯車型中,提供自適應巡航控制、車道保持輔助以及防碰撞制動等先進功能,將最先進的安全技術交到消費者手
AMD Versal自適應SoC器件Advanced Flow概覽(下)
在 AMD Vivado Design Suite 2024.2 版本中,Advanced Flow 自動為所有 AMD Versal 自適應 SoC 器件啟用。請注意,Advanced Flow
基于自適應優化的高速交叉矩陣設計
提出了一種基于自適應優化的交叉矩陣傳輸設計,采用AHB協議并引入自適應突發傳輸調整和自適應優先級調整的創新機制。通過動態調整突發傳輸的長度和優先級分配,實現了對數據流的有效管理,提升了系統的帶寬
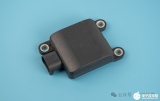
華為與奇瑞合作的77G毫米波雷達內部拆解曝光
顯著的效果。而后,歐美各大車廠開始研發通過毫米波雷達實現基于安全和舒適駕駛目的ACC(Adaptive Cruise Control)自適應巡航功能。從1995年開始西方主要車企業陸續在其高端轎車上安裝ACC系統。1999年梅賽德斯率先在其S級轎車上安裝了77 GHz A
步進電機如何自適應控制?步進電機如何細分驅動控制?
步進電機是一種將電脈沖信號轉換為角位移或線位移的電機,廣泛應用于各種自動化控制系統中。為了提高步進電機的性能,自適應控制和細分驅動控制是兩種重要的技術手段。 一、步進電機的自適應控制 自適應控制

ALINX受邀參加AMD自適應計算峰會
近日,AMD 自適應計算峰會(AMD Adaptive Computing Summit, 即 AMD ACS)在深圳舉行,聚焦 AMD 自適應 SoC 和 FPGA 產品最新動態,以及設計工具和開發環境的前沿技巧,是全球硬件開發者和工程師們深入交流與學習的優質平臺。
如何在自己的固件中增加wifi自適應性相關功能,以通過wifi自適應認證測試?
目前官方提供了自適應測試固件
ESP_Adaptivity_v2.0_26M_20160322.bin 用于進行 wifi 自適應認證測試.
請問如何在自己的固件中增加 wifi 自適應性相關功能,以通過 wifi
發表于 07-12 08:29





 工商網監
工商網監
評論