 電子發(fā)燒友App
電子發(fā)燒友App


智能車輛作為智能交通系統(tǒng)的關(guān)鍵技術(shù)之一,是許多高新技術(shù)綜合集成的載體。它體現(xiàn)了車輛工程、人工智能、自動控制及計(jì)算機(jī)技術(shù)于一體的綜合技術(shù),是未來汽車發(fā)展的趨勢。本文提出了一個(gè)基于STM32F103芯片為控制核心,附以紅外傳感器采集外界信息和檢測障礙物的智能小車系統(tǒng)設(shè)計(jì)方案。充分利用該芯片高速運(yùn)算、處理能力,來實(shí)現(xiàn)小車自動識別路線按跡行走、躲避障礙物,并且通過LCD顯示器實(shí)時(shí)顯示小車運(yùn)動參數(shù),使用芯片自帶的PWM輸出功能,步進(jìn)調(diào)節(jié)占空比來調(diào)節(jié)電機(jī)的轉(zhuǎn)速。通過模糊控制和PWM脈寬調(diào)制技術(shù)的結(jié)合,提高了對車位置控制精度。
1、系統(tǒng)硬件電路設(shè)計(jì)
根據(jù)題目中的設(shè)計(jì)要求,本系統(tǒng)主要由主控單片機(jī)模塊、電源模塊、電機(jī)驅(qū)動模塊、黑線檢測模塊、液晶顯示模塊以及電源模塊構(gòu)成。本系統(tǒng)的方框圖如圖1所示。

1.1主控單片機(jī)模塊
控制器主要用于控制電機(jī)的運(yùn)動,黑線的檢測以及相關(guān)信息的顯示。本設(shè)計(jì)采用STM32作為控制器,其性能優(yōu)良,移植性好,提高了對直流電機(jī)的控制效率,并對控制系統(tǒng)進(jìn)行模塊化設(shè)計(jì),有利于智能小車的功能擴(kuò)展和升級。本系統(tǒng)的核心控制板是STM32F103的最小系統(tǒng),它由電源電路、實(shí)時(shí)時(shí)鐘、系統(tǒng)時(shí)鐘電路、JTAG接口電路、復(fù)位電路、用戶LED和按鍵電路、串口電路等組成。
本小車由于需要倒車,為了倒車的準(zhǔn)確性在小車的前后兩端分別安裝了兩個(gè)紅外傳感器,小車前端兩個(gè)紅外傳感器檢測的到的信號輸入單片機(jī)GPIOB12、GPIOB13,而后端兩個(gè)紅外傳感器檢測的到的信號輸入單片機(jī)GPIOB12、GPIOB13,單機(jī)片經(jīng)處理后通過GPIOE3-GPIOE6驅(qū)動電路控制直流電機(jī)的轉(zhuǎn)向;顯示模塊以2.4寸tft為核心,對記錄的結(jié)果進(jìn)行顯示。
1.2路面黑線檢測模塊
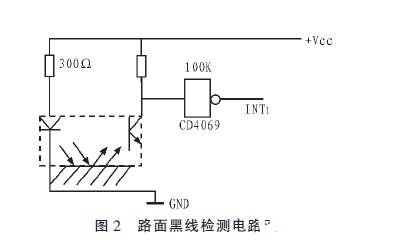
該智能小車在貼有黑線的白紙“路面”上行駛,因此本模塊設(shè)計(jì)需要檢測鋪在行駛區(qū)的黑膠帶,由于黑線和白紙對光線的反射系數(shù)不同,可根據(jù)接收到的反射光的強(qiáng)弱來判斷“道路”———黑線。本文采用的是簡單實(shí)用的檢測方法,即紅外探測法。采用紅外線控制的反射式紅外對管,紅外對管只對紅外線具有較高靈敏度,從而避免了外界光線的干擾;跑道黑帶能夠吸收紅外線,而白色跑道能夠反射紅外線,從而檢測到跑道黑帶。
采用反射式光電開關(guān)來識別軌跡上的黑線標(biāo)記信號,這種光電開關(guān)的紅外發(fā)射管和接收管位于同一側(cè)[3],光敏三極管只能接收反射回的紅外光。當(dāng)車身下面是黑線時(shí),由于黑線吸收部分光,光敏三極管接收到的紅外光不能使光敏三極管導(dǎo)通,光電開關(guān)輸出高電平,經(jīng)非門輸出低電平。反之,當(dāng)車身下面是白色的地面時(shí),紅外發(fā)射管發(fā)射的光經(jīng)其反射后,被接收管接受,光電開關(guān)輸出低電平,經(jīng)非門整形后輸出高電平。將非門的輸出接至單片機(jī)IO口。車在前進(jìn)和后退過程中,小車每過一道黑線,便產(chǎn)生一次電平變化,主程序從而調(diào)用相應(yīng)的子程序,隨著小車的不斷行駛,相應(yīng)的程序依次被調(diào)用執(zhí)行,使小車在跑道上按設(shè)計(jì)要求時(shí)快、時(shí)慢、時(shí)前進(jìn)、時(shí)后退。
1.3電動機(jī)驅(qū)動模塊
采用雙H橋驅(qū)動芯片L298。其內(nèi)部包含4通道邏輯驅(qū)動電路,可以方便的驅(qū)動兩個(gè)直流電機(jī),或一個(gè)兩相步進(jìn)電機(jī)。控制芯片的驅(qū)動使能端就可以控制驅(qū)動電機(jī)的速度。L298芯片采用5V(VSS)與12V(VS)直流供電,ENA和ENB分別用STM32F103主控芯片的TIM3_CH3和PB1/ADC_IN9/TIM3_CH4控制,產(chǎn)生PWM1和PWM2兩路PWM波輸出,IN1-IN4分別用PE3-PE6實(shí)現(xiàn)I/O輸出控制電機(jī)轉(zhuǎn)動方向。在L298與電機(jī)之間加入二極管,以保護(hù)電路。
其基本電路圖如圖3所示。
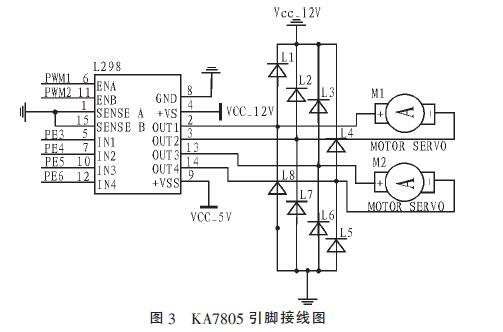
如圖2所示,小車運(yùn)動狀態(tài)通過電機(jī)A和B的不同方向轉(zhuǎn)動來實(shí)現(xiàn),電機(jī)有正轉(zhuǎn)、反轉(zhuǎn)和停止3種狀態(tài),每個(gè)電機(jī)由一對I/O口進(jìn)行控制。表1是I/O端口狀態(tài)與電機(jī)制動對照表。
1.4液晶顯示模塊
液晶顯示模塊使用2.4寸TFT觸摸屏,由STM32的FSMC接口通過ILI9325驅(qū)動芯片驅(qū)動觸摸屏。該驅(qū)動芯片支持240RGB×320像素,可以顯示262144真色彩。支持MVA(Multi_domainVerticalAligement多范圍垂直隊(duì)列)寬視角顯示,組合720通道源極驅(qū)動和320通道門極驅(qū)動,其內(nèi)部集成172800字節(jié)的GRAM(圖形內(nèi)存),以及高速內(nèi)存脈沖寫功能等功能。
1.5電源電路設(shè)計(jì)
由于各電路模塊所需電壓不同,本設(shè)計(jì)需多種電源供電。STM32F103主控芯片采用3.3V供電,電機(jī)驅(qū)動采用5V與12V,紅外收發(fā)檢測電路采用5V,液晶顯示與觸角傳感電路均采用3.3V供電。外部電源采用12V的直流電壓,因此根據(jù)設(shè)計(jì)要求,本設(shè)計(jì)進(jìn)行了電源轉(zhuǎn)換設(shè)計(jì)。
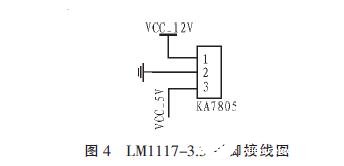
1)采用KA7805芯片實(shí)現(xiàn)12V到5V的轉(zhuǎn)換。KA7805的作用是輸入大于5V的直流電壓,輸出5V的直流電壓,且管腳較少,易于連接和實(shí)現(xiàn),穩(wěn)定性高。圖4為KA7805芯片引腳接線圖。
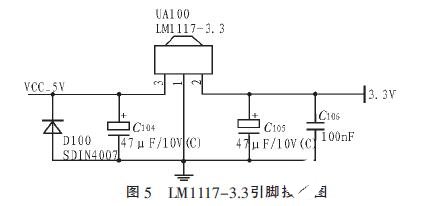
2)本設(shè)計(jì)采用LM1117-3.3芯片將5V轉(zhuǎn)換為3.3V,具體電路設(shè)計(jì)如圖5所示。
2、系統(tǒng)軟件設(shè)計(jì)
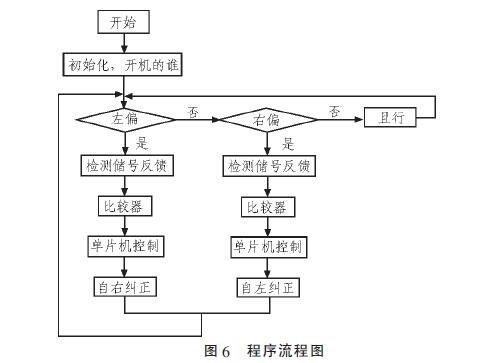
系統(tǒng)軟件設(shè)計(jì)采用C語言編程實(shí)現(xiàn),利用單片機(jī)PWM輸出模塊和普通I/O模塊,根據(jù)系統(tǒng)需求,對各個(gè)模塊進(jìn)行初始化配置,以實(shí)現(xiàn)其相應(yīng)功能。主程序流程如圖6所示。
3、結(jié)論
文中根據(jù)設(shè)計(jì)內(nèi)容和要求,制定了設(shè)計(jì)方案,并逐步完成了硬件和軟件部分的設(shè)計(jì)。整個(gè)系統(tǒng)以STM32為主控芯片,實(shí)現(xiàn)對小車簡單運(yùn)動的控制,完成各部分電路設(shè)計(jì)并使用PROTEL畫出電路設(shè)計(jì)原理圖;軟件部分在STM32集成開發(fā)環(huán)境IAREWARM5.3下編寫各模塊程序,包PWM波輸出模塊、液晶顯示模塊自由行走避障模塊和紅外循跡模塊,并通過主控制程序?qū)⒏髂K融合一起。整個(gè)設(shè)計(jì)將硬件與軟件相結(jié)合,實(shí)現(xiàn)對小車的控制,使小車能夠做出前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)等動作,并通過液晶顯示器實(shí)時(shí)顯示小車的運(yùn)動參數(shù),及對小車速度進(jìn)行調(diào)節(jié),并且能夠在不同模式下通過傳感檢測電路實(shí)現(xiàn)簡單的避障和循跡功能,在本次設(shè)計(jì)中將PWM波占空比控制在1/2以下,使小車不會因速度過高而導(dǎo)
致轉(zhuǎn)彎過程中其方向不易控制。論文基本完成了硬件和軟件的設(shè)計(jì),并使之符合設(shè)計(jì)要求。本設(shè)計(jì)與實(shí)際應(yīng)用相結(jié)合,利用高性能的STM32F103芯片,輔以各種傳感器來檢測路面、障礙物等周圍環(huán)境,通過高可靠性的軟件設(shè)計(jì),來實(shí)現(xiàn)小型電動車的智能控制,具有很強(qiáng)的現(xiàn)實(shí)意義。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論