自動(dòng)駕駛技術(shù)迅速發(fā)展,車輛中的CAN總線已經(jīng)無法滿足數(shù)據(jù)吞吐量和傳輸速度的要求,CAN總線的加速升級(jí)版——CAN FD技術(shù)正在逐漸替代現(xiàn)有網(wǎng)絡(luò)。為了進(jìn)一步了解CAN FD,本文將從產(chǎn)品的實(shí)際應(yīng)用介紹CAN FD的升級(jí)及優(yōu)勢(shì)。
2018-09-20 09:31:40 8550
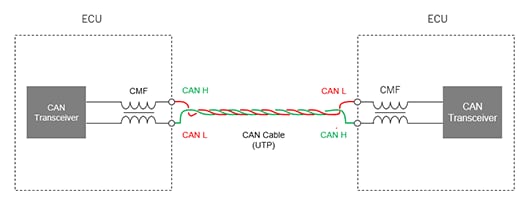
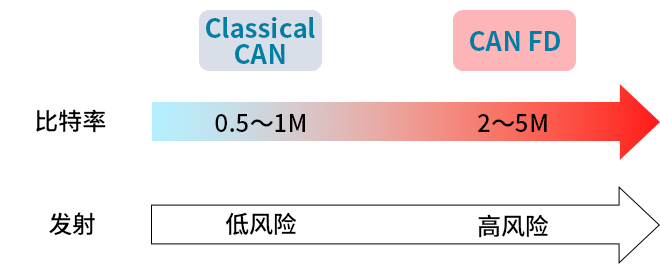
8550 ,根據(jù)協(xié)議和通信速度的不同分為CAN和CAN FD系統(tǒng)。CAN的通信速度在500Kbps,CAN FD最高可以達(dá)到8Mbps。 ? 兩種系統(tǒng)均使用屏蔽雙絞線通信,均為差動(dòng)電壓。在數(shù)據(jù)長(zhǎng)度上CAN只能
2022-04-25 07:52:004472 隨著汽車電子、工業(yè)自動(dòng)化的蓬勃發(fā)展,CAN總線上的設(shè)備數(shù)量、數(shù)據(jù)量都大大增加,給CAN總線帶來的極大的挑戰(zhàn)。為滿足更高的帶寬及數(shù)據(jù)吞吐量,CAN FD(CAN with Flexible Data-Rate)誕生了。
2017-10-18 17:38:1490775 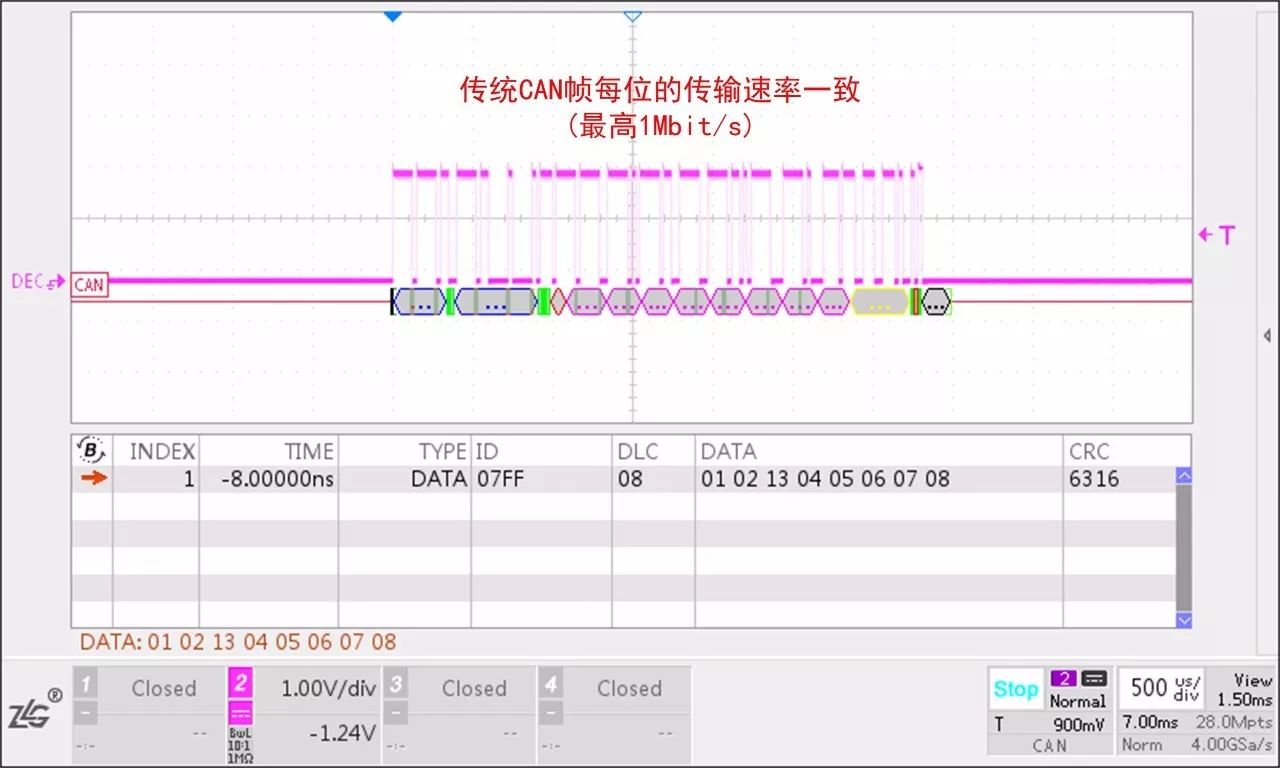
眾所周知,CAN FD是基于CAN 2.0的升級(jí)版協(xié)議,為了滿足汽車電子日益增長(zhǎng)的高帶寬和高傳輸速率的要求,CAN FD主要升級(jí)了以下幾個(gè)方面:
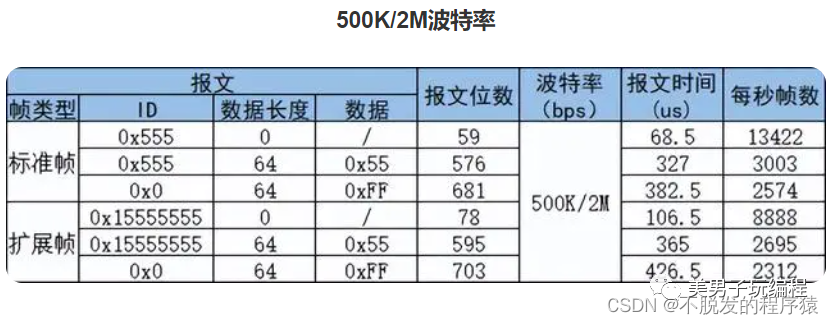
2018-08-22 17:55:0212670 眾所周知CAN FD是CAN 2.0的升級(jí)協(xié)議,也是汽車電子行業(yè)未來發(fā)展的主要趨勢(shì),那CAN FD到底能跑多快呢?
2018-09-17 10:01:5915260 CAN 芯片將數(shù)據(jù)根據(jù)協(xié)議組織成一定的報(bào)文格式發(fā)出,這時(shí)網(wǎng)上的其它站處于接收狀態(tài)。每個(gè)處于接收狀態(tài)的站對(duì)接收到的報(bào)文進(jìn)行檢測(cè),判斷這些報(bào)文是否是發(fā)給自己的,以確定是否接收它。
2021-05-28 05:08:006940 
CAN總線上傳輸?shù)男畔⒎Q為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
2022-09-26 14:15:5212197 CAN總線上傳輸?shù)男畔⒎Q為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
2022-09-28 15:20:401014 
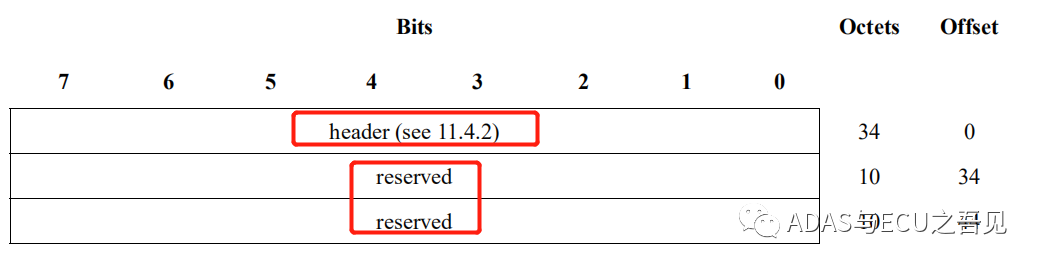
假期更新了一文搞懂CAN總線協(xié)議幀格式,CAN FD總線協(xié)議怎能錯(cuò)過?本篇博文將講解CAN FD總線協(xié)議幀格式。
2022-10-14 12:49:532679 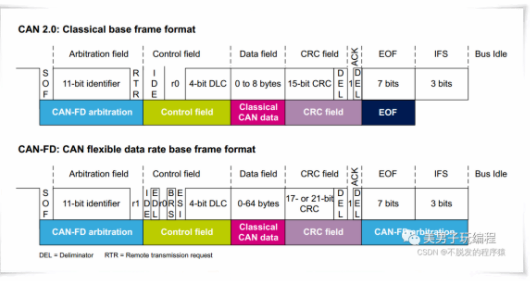
應(yīng)用指南—如何使用DSLogic分析CAN/CAN-FD 信號(hào)?
2023-09-04 14:15:561121 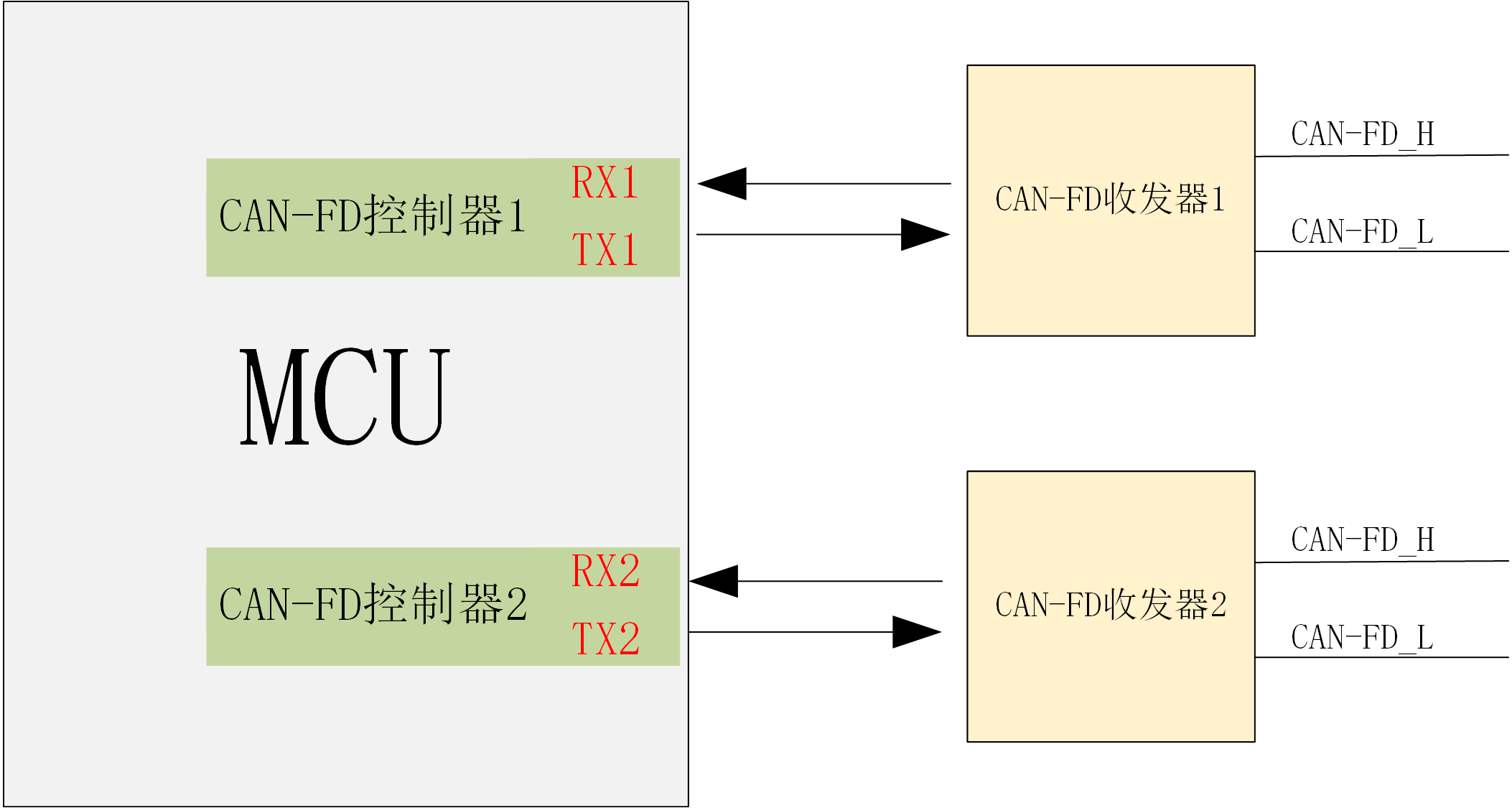
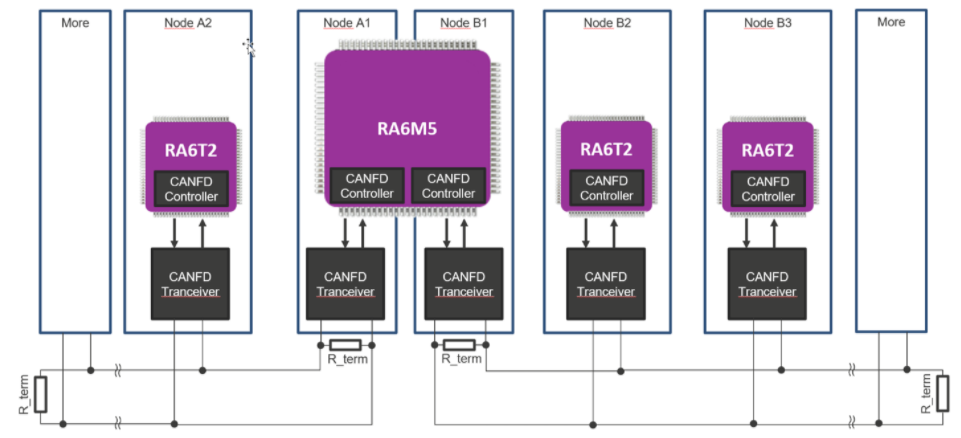
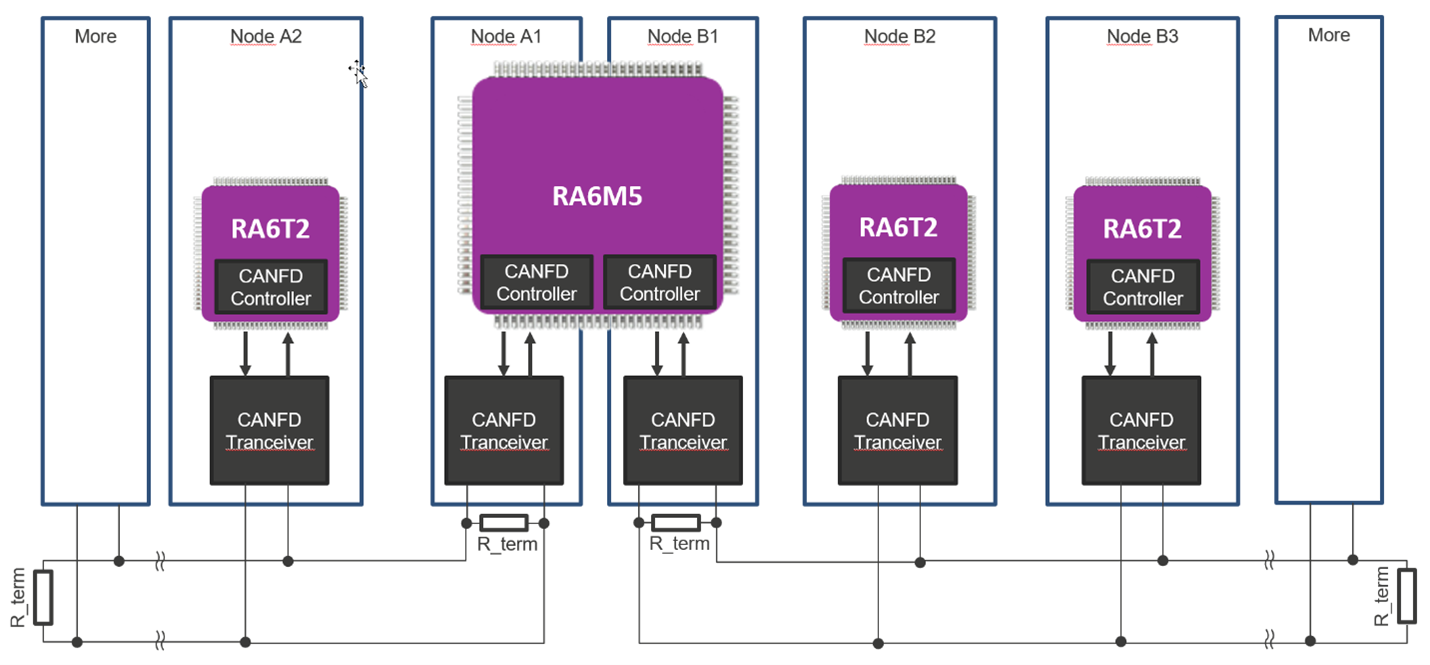
MCU內(nèi)置了CAN控制器用來將MCU的數(shù)據(jù)封裝為CAN幀格式,同時(shí)它也負(fù)責(zé)CAN幀的校驗(yàn)和錯(cuò)誤幀的處理。控制器封裝好的邏輯報(bào)文經(jīng)TX RX送到CAN收發(fā)器,將邏輯信號(hào)轉(zhuǎn)變?yōu)檎嬲目偩€差分波形。
2023-09-08 09:19:32672 CAN FD與CAN的不同之處有哪些?
2021-05-21 06:05:52
、CAN-FD特性(1)兼容經(jīng)典CAN,可以遵循ISO 11898-1做數(shù)據(jù)收發(fā)。(2)提升錯(cuò)誤檢測(cè),支持高達(dá)CRC 21位的校驗(yàn)和。(3)消息優(yōu)先級(jí)。(4)保證延遲時(shí)間。(5)配置靈活性。(6)具有時(shí)間同步的組播接收。(7)系統(tǒng)范圍內(nèi)的數(shù)據(jù)一致性,每條消息最多64個(gè)字節(jié)。(8)多主機(jī)。(9)
2021-08-20 06:51:10
1. CAN報(bào)文定義CAN報(bào)文是指發(fā)送單元向接受單元傳送數(shù)據(jù)的幀。我們通常所說的CAN報(bào)文是指在CAN線(內(nèi)部CAN、整車CAN、充電CAN)上利用ECU和CAN卡接收到的十六進(jìn)制報(bào)文。2. CAN
2021-09-14 09:23:24
CAN總線中報(bào)文數(shù)據(jù)讀取方法motorola編碼格式的CAN報(bào)文解析需要知道DBC的哪些信息排序方式讀取方式發(fā)送方式注motorola編碼格式的CAN報(bào)文解析知道CAN報(bào)文的DBC,即可按以下
2022-01-12 07:28:16
讓我們來了解一下這方面的知識(shí)吧。1,CAN總線協(xié)議基本概念:(1),報(bào)文:總線上的信息以不同格式的報(bào)文發(fā)送,但長(zhǎng)度有限。當(dāng)總線開放時(shí),任何連接的單元均可開始發(fā)送一個(gè)新報(bào)文。(2),信息路由:在CAN系統(tǒng)中
2014-04-27 15:16:02
我們已經(jīng)圍繞 CAN 總線 2.0 開發(fā)了我們的控制系統(tǒng),但我們正試圖升級(jí)到 H7,但它只有 CAN FD。問題是,CAN 總線 FD 是否可以配置為像 CAN 總線 2.0 一樣運(yùn)行?
2022-12-16 07:27:08
到車輛的運(yùn)行情況,做出及時(shí)的措施。廣州致遠(yuǎn)電子股份有限公司繼研發(fā)成功 CANREC—— 8 通道 CAN 總線報(bào)文波形記錄分析儀之后。又推出了一系列帶無線數(shù)據(jù)傳輸?shù)?CAN 總線記錄儀,不但可以離線 CAN 記錄儀進(jìn)行報(bào)文記錄,還可以進(jìn)行 GPRS、3G等遠(yuǎn)程傳輸。如圖 1 所示。
2022-10-17 07:33:01
讓我們來了解一下這方面的知識(shí)吧。1,CAN總線協(xié)議基本概念:(1),報(bào)文:總線上的信息以不同格式的報(bào)文發(fā)送,但長(zhǎng)度有限。當(dāng)總線開放時(shí),任何連接的單元均可開始發(fā)送一個(gè)新報(bào)文。(2),信息路由:在CAN系統(tǒng)
2014-04-18 16:36:30
版本規(guī)定CAN控制器必須有一個(gè)11位的標(biāo)志符。同時(shí),在2.0B版本中規(guī)定,CAN控制器的標(biāo)志符長(zhǎng)度可以是11位或29位。遵循CAN2.0B協(xié)議的CAN控制器可以發(fā)送和接收11位標(biāo)識(shí)符的標(biāo)準(zhǔn)格式報(bào)文或
2017-10-19 11:12:46
CAN總線的發(fā)送基本概念報(bào)文的作用報(bào)文的格式CAN.C代碼//CAN發(fā)送一組數(shù)據(jù)(固定格式:ID為0X12,標(biāo)準(zhǔn)幀,數(shù)據(jù)幀)//msg:數(shù)據(jù)指針,最大為8個(gè)字節(jié),len:數(shù)據(jù)長(zhǎng)度(最大為8
2021-08-19 08:17:55
1.CAN接口和can_fd的區(qū)別
2021-12-10 08:17:17
_CS_EDL(pTxFrame->edl))。我測(cè)試的結(jié)果是FLEXCANFD還可以同時(shí)接收CAN2.0B和CANFD幀格式的CAN報(bào)文。但是我無法通過flexcan_fd_frame_t.edl來區(qū)分接收
2023-03-20 08:11:52
我在 goldbox 上以 DMA 模式使用 flexcan 時(shí)遇到字節(jié)字節(jié)序錯(cuò)誤。因?yàn)闆]有DMA,發(fā)送正常。當(dāng)接收到第一幀CAN FD報(bào)文時(shí),報(bào)文中的字節(jié)順序沒有問題,可以接收到CAN ID。收到
2023-04-27 07:09:12
TJA1145ATK/FD,配置好喚醒ID后,發(fā)現(xiàn)去除了配置的喚醒ID可以將設(shè)備喚醒,任意的CAN FD報(bào)文也能足夠?qū)⑵鋯拘?寄存器配置如下:0x26寄存器配置為0x05,波特率為500kbit
2023-03-21 06:47:39
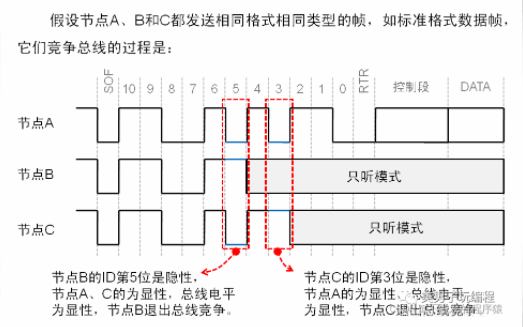
發(fā)送時(shí),發(fā)送高優(yōu)先級(jí)ID消息的單元可獲得發(fā)送權(quán); 2、消息的發(fā)送 在can協(xié)議中,所有消息都是以固定格式發(fā)送。總線空閑時(shí),所有與總線相連的單元都可以開始發(fā)送新消息。兩個(gè)以上的單元同時(shí)開始
2015-01-22 16:12:04
申請(qǐng)理由:目前市面上流行的都是燃油車的OBD的CAN診斷設(shè)備。而電動(dòng)車和混合動(dòng)力汽車沒有一個(gè)統(tǒng)一的診斷標(biāo)準(zhǔn)。隨著御捷車業(yè)集團(tuán)的發(fā)展,先繼續(xù)一套CAN總線診斷設(shè)備用于研發(fā)和售后維修。而AWorks
2015-07-20 22:22:24
申請(qǐng)理由:目前市面上流行的都是燃油車的OBD的CAN診斷設(shè)備。而電動(dòng)車和混合動(dòng)力汽車沒有一個(gè)統(tǒng)一的診斷標(biāo)準(zhǔn)。隨著御捷車業(yè)集團(tuán)的發(fā)展,先繼續(xù)一套CAN總線診斷設(shè)備用于研發(fā)和售后維修。而AWorks
2015-07-21 08:34:44
)傳輸速率更快FD全稱是 Flexible Data-Rate,顧名思義,表示CAN-FD 的幀報(bào)文具有數(shù)據(jù)場(chǎng)波特率可變的特性,即仲裁場(chǎng)合數(shù)據(jù)控制場(chǎng)使用標(biāo)準(zhǔn)的通信波特率,而到數(shù)據(jù)場(chǎng)就會(huì)切換為更高的通信
2023-02-14 14:22:23
MCU沒有CAN或CAN接口數(shù)量不夠怎么辦?目前市面上有串口轉(zhuǎn)CAN的相關(guān)模塊或設(shè)備,但大家知道串口轉(zhuǎn)CAN是如何實(shí)現(xiàn)的嗎?轉(zhuǎn)換后的幀格式是如何的?本文將為大家詳細(xì)介紹串口經(jīng)過轉(zhuǎn)換后的CAN幀格式與注意事項(xiàng)。
2021-01-26 07:40:48
,出現(xiàn)大量錯(cuò)誤報(bào)文,導(dǎo)致總線通訊異常。圖 4CAN與CAN FD報(bào)文的波形對(duì)比如圖三所示,可以看到CAN FD的傳輸速率是5Mbit/s,而CAN的傳輸速率為500Kbit/s,我們?cè)谄匠J褂蒙衔粰C(jī)
2019-05-29 17:45:36
控制器與 ISO11898-1 FD 格式幀不兼容,并將此類幀解釋為錯(cuò)誤。我想知道是否有任何外部組件可以使 ESP32S3 與 CAN-FD 兼容。
2023-03-02 08:35:35
在調(diào)試程序的時(shí)候,我們可以通過CAN報(bào)文把一些關(guān)鍵變量的值輸出,來觀察程序的運(yùn)行狀態(tài),下面我們就來看一下如何輸出CAN報(bào)文,并在發(fā)送成功后,觸發(fā)一個(gè)CAN中斷。1.首先要包含CAN驅(qū)動(dòng)頭文件
2022-02-22 06:43:38
什么是標(biāo)準(zhǔn)格式CAN和擴(kuò)展格式CAN?標(biāo)準(zhǔn)CAN的標(biāo)志符長(zhǎng)度是11位,而擴(kuò)展格式CAN的標(biāo)志符長(zhǎng)度可達(dá)29位。CAN 協(xié)議的2.0A版本規(guī)定CAN控制器必須有一個(gè)11位的標(biāo)志符。同時(shí),在2.0B
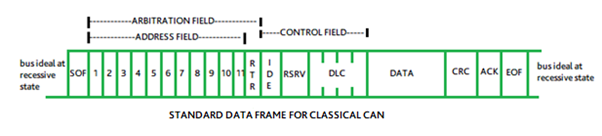
2008-10-27 13:08:016281 CAN-bus總線是應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一,而很多非常熟練的CAN工程師,面對(duì)一條CAN報(bào)文到底有多少位的問題時(shí),卻不能非常準(zhǔn)確地回答。今天我們就從最基本的幀格式來解惑一條CAN報(bào)文的到底有多少位。
2017-06-06 16:36:2932775 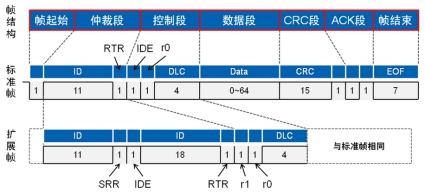
Microchip日前宣布,開始提供業(yè)界第一款外部CAN靈活數(shù)據(jù)速率(CAN FD)控制器。采用MCP2517FD,設(shè)計(jì)人員能夠很快從CAN 2.0升級(jí)到CAN FD,受益于CAN FD增強(qiáng)協(xié)議。
2017-10-19 06:31:0019441 明顯的區(qū)別。 當(dāng)CAN總線上的一個(gè)節(jié)點(diǎn)(站)發(fā)送數(shù)據(jù)時(shí),它以報(bào)文形式廣播給網(wǎng)絡(luò)中所有節(jié)點(diǎn)。對(duì)每個(gè)節(jié)點(diǎn)來說,無論數(shù)據(jù)是否是發(fā)給自己的,都對(duì)其進(jìn)行接收。每組報(bào)文開頭的11位字符為標(biāo)識(shí)符,定義了報(bào)文的優(yōu)先級(jí),這種報(bào)文格式稱為面向內(nèi)容的編址方案。在
2017-12-07 10:25:54 26
26 及復(fù)雜度提高的同時(shí),也帶來了全新的測(cè)試測(cè)量挑戰(zhàn)。泰克最新CAN FD解決方案為處理這一協(xié)議的汽車工程師提供了強(qiáng)大的調(diào)試和驗(yàn)證工具,可以全面洞察實(shí)際總線業(yè)務(wù),迅速高效地驗(yàn)證和調(diào)試設(shè)計(jì)。
2018-04-09 14:13:00881 
microchip公司的MCP2517FD是成本效益和小占位尺寸的CAN FD(靈活數(shù)據(jù)速率)控制器,具有和微處理器(MCU)接口的SPI接口.器件支持經(jīng)典格式(CAN2.0B)和CAN靈活數(shù)據(jù)速率
2018-05-25 01:25:0011760 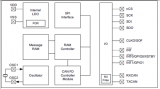
的情況要特別注意, 由于幀格式不一致的原因, CANFD 節(jié)點(diǎn)可以正常收發(fā)傳統(tǒng) CAN 節(jié)點(diǎn)報(bào)文,但是傳統(tǒng) CAN 節(jié)點(diǎn)不能正常收發(fā) CANFD 節(jié)點(diǎn)的報(bào)文。 CAN FD協(xié)議是CAN-BUS協(xié)議
2018-07-09 11:53:5910986 MCP2517FD是一種低成本、占地面積小的FD控制器,可以很容易地添加到具有可用SPI接口的微控制器中。因此,CAN FD信道可以容易地添加到微控制器中,該微控制器要么缺少CAN FD外圍設(shè)備,要么沒有足夠的CAN FD信道。
2018-07-10 08:00:0034 的CAN技術(shù)呈現(xiàn)出來的新技術(shù)-CAN FD,在它誕生沒多久就可以見證和陪伴它的“成長(zhǎng)”,對(duì)于技術(shù)工程師來說是多么美妙的事情。
2020-01-16 08:06:0020987 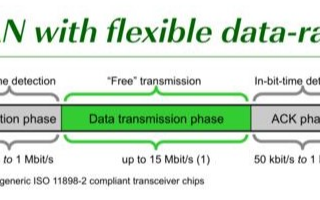
自動(dòng)駕駛技術(shù)迅速發(fā)展,車輛中的CAN總線已經(jīng)無法滿足數(shù)據(jù)吞吐量和傳輸速度的要求,CAN總線的加速升級(jí)版——CAN FD技術(shù)正在逐漸替代現(xiàn)有網(wǎng)絡(luò),為了進(jìn)一步了解CAN FD,本文將從產(chǎn)品的實(shí)際應(yīng)用介紹CAN FD的升級(jí)及優(yōu)勢(shì)。
2018-09-19 16:56:0312522 MCP2517FD是一種成本低廉、占地面積小的CAN FD控制器,可以容易地添加到具有可用SPI接口的微控制器中。因此,可以容易地將CAN FD通道添加到缺少CAN FD外圍設(shè)備或者沒有足夠的CAN FD通道的微控制器。
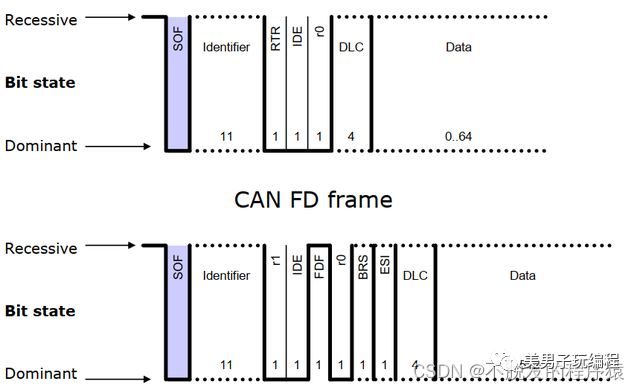
2018-09-21 08:00:00211 CAN FD的七個(gè)技術(shù)問題資料總結(jié)包括了:1.CAN FD的數(shù)據(jù)幀格式變化?2.CAN FD與CAN的區(qū)別?3.CAN FD數(shù)據(jù)長(zhǎng)度擴(kuò)充?4.CAN FD與CAN的兼容問題?5.CAN FD CRC
2018-09-27 08:00:0028 MCU沒有CAN或CAN接口數(shù)量不夠怎么辦?目前市面上有串口轉(zhuǎn)CAN的相關(guān)模塊或設(shè)備,但大家知道串口轉(zhuǎn)CAN是如何實(shí)現(xiàn)的嗎?轉(zhuǎn)換后的幀格式是如何的?本文將為大家詳細(xì)介紹串口經(jīng)過轉(zhuǎn)換后的CAN幀格式與注意事項(xiàng)。
2019-02-02 16:30:0014376 隨著新能源汽車的發(fā)展,需要傳輸?shù)臄?shù)據(jù)量也逐漸增加,很多車廠都在考慮使用CAN FD來替代CAN實(shí)現(xiàn)數(shù)據(jù)量傳輸?shù)奶崴佟D敲慈绾畏€(wěn)定地升級(jí)到CAN FD呢?本文為您解答。
2019-06-02 09:08:484546 
已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App






















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論