 電子發(fā)燒友App
電子發(fā)燒友App


3.5. 列表
任務(wù)之后,最常用的FreeRTOS數(shù)據(jù)結(jié)構(gòu)是列表。FreeRTOS使用列表結(jié)構(gòu)來跟蹤調(diào)度任務(wù),并執(zhí)行隊(duì)列。

圖3.3:就緒列表全貌
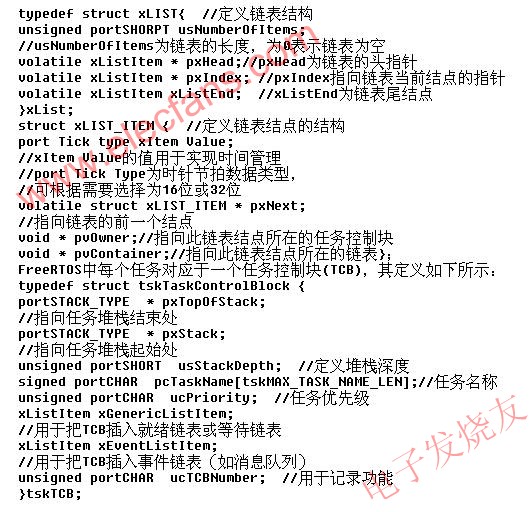
這個FreeRTOS的列表是一個有著幾個有趣的補(bǔ)充的標(biāo)準(zhǔn)循環(huán)雙鏈表。下面就是列表元素:
struct xLIST_ITEM
{
portTickType xItemValue; /* The value being listed. In most cases
this is used to sort the list in
descending order. */
volatile struct xLIST_ITEM * pxNext; /* Pointer to the next xListItem in the
list. */
volatile struct xLIST_ITEM * pxPrevious; /* Pointer to the previous xListItem in
the list. */
void * pvOwner; /* Pointer to the object (normally a TCB)
that contains the list item. There is
therefore a two-way link between the
object containing the list item and
the list item itself. */
void * pvContainer; /* Pointer to the list in which this list
item is placed (if any). */
};
每個元素持有一個數(shù)字,xItemValue,這通常是一個被跟蹤的任務(wù)優(yōu)先級或者是一個調(diào)度事件的計時器值。列表保存從高到低的優(yōu)先級指令,這意味著最高的優(yōu)先級xItemValue(最大數(shù))在列表的最前端,而最低的優(yōu)先級xItemValue(最小數(shù))在列表的末尾。
pxNext和pxPrevious指針是標(biāo)準(zhǔn)鏈表指針。pvOwner 列表元素所有者的指針。這通常是任務(wù)的TCB對象的指針。pvOwner被用來在vTaskSwitchContext()中加快任務(wù)切換:當(dāng)最高優(yōu)先級任務(wù)元素在pxReadyTasksLists[]中被發(fā)現(xiàn),這個列表元素的pvOwner指針直接連接到需要任務(wù)調(diào)度的TCB。
pvContainer指向自己所在的這個列表。若列表項(xiàng)處于一個特定列表它被用作快速終止。任意列表元素可以被置于一個列表,如下所定義:
typedef struct xLIST
{
volatile unsigned portBASE_TYPE uxNumberOfItems;
volatile xListItem * pxIndex; /* Used to walk through the list. Points to
the last item returned by a call to
pvListGetOwnerOfNextEntry (). */
volatile xMiniListItem xListEnd; /* List item that contains the maximum
possible item value, meaning it is always
at the end of the list and is therefore
used as a marker. */
} xList;
列表的大小任何時候都是被存儲在uxNumberOfItems中,用于快速列表大小操作。所有的列表都被初始化為容納一個元素:xListEnd元素。xListEnd.xItemValue是一個定點(diǎn)值,當(dāng)portTickType是16位數(shù)時,它等于xItemValue變量的最大值:0xffff,portTickType是32位數(shù)時為0xffffffff。其他的列表元素也可以使用相同的值;插入算法保證了xListEnd總是列表項(xiàng)中最后一個值。
自列表從高到低排序后,xListEnd被用作列表開始的記號。并且,自循環(huán)開始,xListEnd也被用作列表結(jié)束的記號。
你也許可以用一個單獨(dú)的for()循環(huán)或者是函數(shù)調(diào)用來訪問大多數(shù)“傳統(tǒng)的”列表,去做所有的工作,就像這樣:
for (listPtr = listStart; listPtr != NULL; listPtr = listPtr->next) {
// Do something with listPtr here...
}
FreeRTOS經(jīng)常需要通過多個for()和while()循環(huán),也包括函數(shù)調(diào)用來訪問列表,因此它使用操縱pxIndex指針的列表函數(shù)來遍歷這個列表。這個列表函數(shù)listGET_OWNER_OF_NEXT_ENTRY()執(zhí)行pxIndex = pxIndex->pxNext;并且返回pxIndex。(當(dāng)然它也會正確檢測列尾環(huán)繞。)這種,當(dāng)執(zhí)行遍歷的時候使用pxIndex,由列表自己負(fù)責(zé)跟蹤“在哪里”的方法,使FreeRTOS可以休息而不用關(guān)心這方面的事。

圖3.4:系統(tǒng)節(jié)拍計時器下的FreeRTOS就緒列表全貌
pxReadyTasksLists[]列出了在vTaskSwitchContext()中已經(jīng)操縱完成的內(nèi)容,是如何使用pxIndex的一個很好的例子。讓我們假設(shè)我們僅有一個優(yōu)先級,優(yōu)先級0,并且有三個任務(wù)在此優(yōu)先級上。這與我們之前看到的基本就緒列表圖相似,但這一次我們將包括所有的數(shù)據(jù)結(jié)構(gòu)和字段。
就如你在圖3.3中所見,pxCurrentTCB顯示我們當(dāng)前正在運(yùn)行任務(wù)B。下一個時刻,vTaskSwitchContext()運(yùn)行,它調(diào)用listGET_OWNER_OF_NEXT_ENTRY()載入下一個任務(wù)來運(yùn)行。如圖3.4所示,這個函數(shù)使用pxIndex->pxNext找出下一個任務(wù)是任務(wù)C,并且pxIndex指向任務(wù)C的列表元素,同時pxCurrentTCB指向任務(wù)C的TCB。
請注意,每個struct xlistitem對象實(shí)際上都是來自相關(guān)TCB的xGenericListItem對象。
3.6. 隊(duì)列
FreeRTOS允許任務(wù)使用隊(duì)列來互相間通信和同步。中斷服務(wù)程序(ISRs)同樣使用隊(duì)列來通信和同步。
基本隊(duì)列數(shù)據(jù)結(jié)構(gòu)如下:
typedef struct QueueDefinition
{
signed char *pcHead; /* Points to the beginning of the queue
storage area. */
signed char *pcTail; /* Points to the byte at the end of the
queue storage area. One more byte is
allocated than necessary to store the
queue items; this is used as a marker. */
signed char *pcWriteTo; /* Points to the free next place in the
storage area. */
signed char *pcReadFrom; /* Points to the last place that a queued
item was read from. */
xList xTasksWaitingToSend; /* List of tasks that are blocked waiting
to post onto this queue. Stored in
priority order. */
xList xTasksWaitingToReceive; /* List of tasks that are blocked waiting
to read from this queue. Stored in
priority order. */
volatile unsigned portBASE_TYPE uxMessagesWaiting; /* The number of items currently
in the queue. */
unsigned portBASE_TYPE uxLength; /* The length of the queue
defined as the number of
items it will hold, not the
number of bytes. */
unsigned portBASE_TYPE uxItemSize; /* The size of each items that
the queue will hold. */
} xQUEUE;
這是一個頗為標(biāo)準(zhǔn)的隊(duì)列,不但包括了頭部和尾部指針,而且指針指向我們剛剛讀過或者寫過的位置。
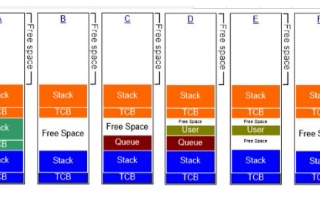
當(dāng)剛剛創(chuàng)建一個隊(duì)列,用戶指定了隊(duì)列的長度和需要隊(duì)列跟蹤的項(xiàng)目大小。pcHead和pcTail被用來跟蹤隊(duì)列的內(nèi)部存儲器。加入一個項(xiàng)目到隊(duì)列就對隊(duì)列內(nèi)部存儲器進(jìn)行一次深拷貝。
FreeRTOS用深拷貝替代在項(xiàng)目中存放一個指針是因?yàn)橛锌赡茼?xiàng)目插入的生命周期要比隊(duì)列的生命周期短。例如,試想一個簡單的整數(shù)隊(duì)列使用局部變量,跨幾個函數(shù)調(diào)用的插入和刪除。如果這個隊(duì)列在局部變量里存儲這些整數(shù)的指針,當(dāng)整數(shù)的局部變量離開作用域時指針將會失效,同時局部變量的存儲空間將被新的數(shù)值使用。
什么需要用戶選擇使用隊(duì)列。若內(nèi)容很少,用戶可以把復(fù)制的內(nèi)容進(jìn)行排列,就像上圖中簡單整數(shù)的例子,或者,若內(nèi)容很多,用戶可以排列內(nèi)容的指針。請注意,在這兩種情況下FreeRTOS都是在做深拷貝:如果用戶選擇排列復(fù)制的內(nèi)容,那么這個隊(duì)列存儲了每項(xiàng)內(nèi)容的一份深拷貝;如果用戶選擇了排列指針,隊(duì)列存儲了指針的一份深拷貝。當(dāng)然,用戶在隊(duì)列里存儲了指針,那么用戶有責(zé)任管理與內(nèi)存相關(guān)的指針。隊(duì)列并不關(guān)心你存儲了什么樣的數(shù)據(jù),它只需要知道數(shù)據(jù)的大小。
FreeRTOS支持阻塞和非阻塞隊(duì)列的插入和移除。非阻塞隊(duì)列操作會立即返回"隊(duì)列的插入是否完成?"或者 "隊(duì)列的移除是否完成?"的狀態(tài)。阻塞操作則根據(jù)特定的超時。一個任務(wù)可以無限期地阻塞或者在有限時間里阻塞。
一個阻塞任務(wù)——叫它任務(wù)A——將保持阻塞只要它的插入/移除操作沒有完成,并且它的超時(如果存在)沒有過期。如果一個中斷或者另一個任務(wù)編輯了這個隊(duì)列以便任務(wù)A的操作能夠完成,任務(wù)A將被解除阻塞。如果此時任務(wù)A的隊(duì)列操作仍然是允許的,那么它實(shí)際上會執(zhí)行操作,于是任務(wù)A會完成它的隊(duì)列操作,并且返回“成功”的狀態(tài)。不過,任務(wù)A正在執(zhí)行的那個時間,有可能同時有一個高優(yōu)先級任務(wù)或者中斷也在同一個隊(duì)列上執(zhí)行另一個操作,這會阻止任務(wù)A正在執(zhí)行的操作。在這種情況下任務(wù)A將檢查它的超時,同時,如果它未超時就恢復(fù)阻塞,否則就返回隊(duì)列操作“失敗”的狀態(tài)。
特別需要注意的是,當(dāng)任務(wù)被阻塞在一個隊(duì)列時,系統(tǒng)保持運(yùn)行所帶來的風(fēng)險;以及當(dāng)任務(wù)被阻塞在一個隊(duì)列時,有其他任務(wù)或中斷在繼續(xù)運(yùn)行。這種阻塞任務(wù)的方法能不浪費(fèi)CPU周期,使其他任務(wù)和中斷可以有效地使用CPU周期。
FreeRTOS使用xTasksWaitingToSend列表來保持對正阻塞在插入隊(duì)列里的任務(wù)的跟蹤。每當(dāng)有一個元素被移出隊(duì)列,xTasksWaitingToSend列表就會被檢查。如果有個任務(wù)在那個列表中等待,那個是未阻塞任務(wù)。同樣的,xTasksWaitingToReceive保持對那些正阻塞在移除隊(duì)列里的任務(wù)的跟蹤。每當(dāng)有一個新元素被插入到隊(duì)列,xTasksWaitingToReceive列表就會被檢查。如果有個任務(wù)在那個列表中等待,那個是未阻塞任務(wù)。
信號燈和互斥
FreeRTOS使用它的隊(duì)列與任務(wù)通信,也在任務(wù)間通信。FreeRTOS也使用它的隊(duì)列來實(shí)現(xiàn)信號燈與互斥。
有什么區(qū)別?
信號燈與互斥聽上去像一回事,但它們不是。FreeRTOS同樣地實(shí)現(xiàn)了它們,但本來它們以不同的方式被使用。它們是如何不同地被使用?嵌入式系統(tǒng)宗師Michael Barr說這是在他文章中寫得最好的,“信號燈與互斥揭秘”:
The correct use of a semaphore is for signaling from one task to another. A mutex is meant to be taken and released, always in that order, by each task that uses the shared resource it protects. By contrast, tasks that use semaphores either signal ["send" in FreeRTOS terms] or wait ["receive" in FreeRTOS terms] - not both.
正確使用的一個信號是從一個任務(wù)向另一個發(fā)信號。從每個使用被保護(hù)共享資源的任務(wù)來看,總是認(rèn)為,一個互斥意味著獲得和釋放。相比之下,使用信號燈的任務(wù)不是發(fā)信號[在FreeRTOS里“發(fā)送”]就是在等信號[在FreeRTOS里“接收”]——不能同時。
互斥被用來保護(hù)共享資源。一個使用共享資源的任務(wù)獲得互斥,接著釋放互斥。當(dāng)有另一個任務(wù)占據(jù)互斥時,沒有一個任務(wù)可以獲得這個互斥。這就是保證,在同一時刻僅有一個任務(wù)可以使用共享資源。
一個任務(wù)向另一個任務(wù)發(fā)信號時使用信號燈。以下引用Barr的文章:
For example, Task 1 may contain code to post (i.e., signal or increment) a particular semaphore when the "power" button is pressed and Task 2, which wakes the display, pends on that same semaphore. In this scenario, one task is the producer of the event signal; the other the consumer.
舉例來說,任務(wù)一可能包含當(dāng)“電源”按鈕被按下時,發(fā)布(即,發(fā)信號或增加信號量)一個特定的信號燈的代碼,并且喚醒顯示屏的任務(wù)二,取決于同一個信號燈。在這種情況下,一個任務(wù)是發(fā)信號事件的制造者;另一個是消費(fèi)者。
如果你是在信號燈和互斥有任何疑問,請查閱Michael的文章。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論