 電子發(fā)燒友App
電子發(fā)燒友App


作者: KURT SCHULER營(yíng)銷(xiāo)副總裁,Arteris IP www.arteris.com
高級(jí)駕駛輔助系統(tǒng) (ADAS) 和自動(dòng)駕駛汽車(chē)正在推動(dòng)新芯片的爆炸式增長(zhǎng),其核心是片上系統(tǒng) (SoC),這是一種運(yùn)行復(fù)雜算法并包含許多硬件加速器的強(qiáng)大半導(dǎo)體設(shè)備“大腦。” 事實(shí)上,汽車(chē) SoC 是自動(dòng)駕駛汽車(chē)淘金熱的無(wú)名英雄,許多人稱之為先進(jìn)工程的奇跡。
工程師如何有效地設(shè)計(jì)這些超級(jí)芯片,使其每秒處理數(shù)十億次操作,以近乎實(shí)時(shí)地識(shí)別和分類道路上的物體?設(shè)計(jì)處理來(lái)自多個(gè)傳感器、雷達(dá)和攝像頭的信息以執(zhí)行物體識(shí)別、距離估計(jì)和 3D 映射的 SoC 的實(shí)際挑戰(zhàn)是什么?
以下是推動(dòng)這些類似超級(jí)計(jì)算機(jī)的處理設(shè)備設(shè)計(jì)的三個(gè)趨勢(shì),無(wú)論是今天的 ADAS 還是明天的自動(dòng)駕駛。
1. 管理復(fù)雜性汽車(chē) SoC 包含越來(lái)越多的一切——CPU、DSP、內(nèi)存、時(shí)鐘等——以執(zhí)行視覺(jué)處理、傳感器融合、信息娛樂(lè)等各種任務(wù)。汽車(chē) SoC 必須近乎實(shí)時(shí)地響應(yīng)物理世界中不斷變化的條件,這進(jìn)一步增加了設(shè)計(jì)的復(fù)雜性。
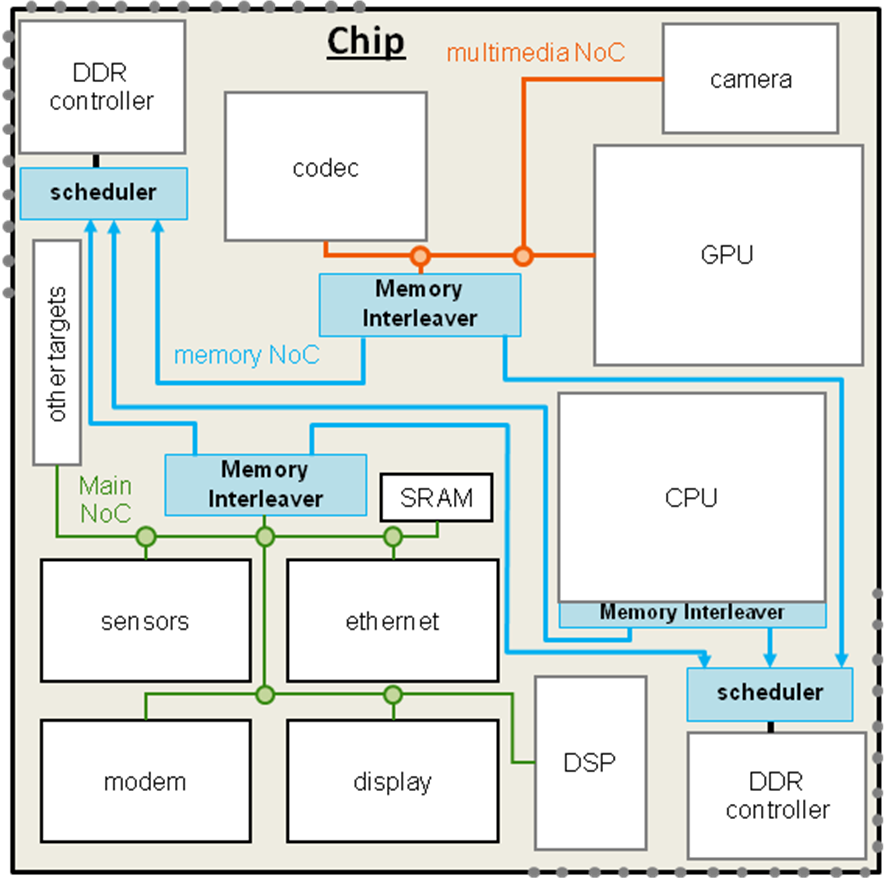
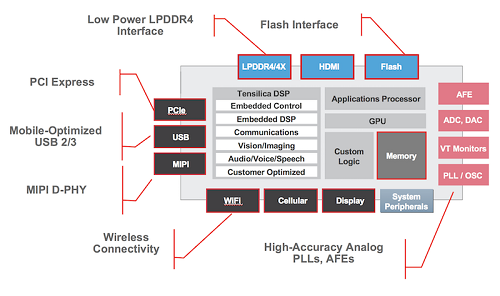
圖 2:隨著高度專業(yè)化的 IP 加速器數(shù)量的不斷增加,汽車(chē) SoC 設(shè)計(jì)變得越來(lái)越大和越來(lái)越復(fù)雜。圖片來(lái)源:Dream Chip Technologies GmbH。
這些新的汽車(chē) SoC 在單個(gè)芯片上利用多個(gè)專用處理單元來(lái)執(zhí)行多個(gè)同時(shí)執(zhí)行的任務(wù),例如攝像頭視覺(jué)、車(chē)身控制和信息顯示。片上通信基礎(chǔ)設(shè)施是確保芯片上高效數(shù)據(jù)流的關(guān)鍵。隨著處理元件類型和數(shù)量的增加,連接這些處理元件的互連和內(nèi)存架構(gòu)的作用變得至關(guān)重要。
汽車(chē) SoC 不再是緩慢且耗電的片外 DRAM 訪問(wèn),而是越來(lái)越多地采用內(nèi)存技術(shù),這些技術(shù)可以將數(shù)據(jù)保存在將要使用的位置附近。與單個(gè)處理元件緊密耦合的存儲(chǔ)器通常作為內(nèi)部 SRAM 實(shí)現(xiàn),并且通常對(duì)正在運(yùn)行的軟件是透明的。這種方法適用于較小的系統(tǒng),但處理元件數(shù)量的增加需要相應(yīng)增加緊密耦合的存儲(chǔ)器。
另一種方法是擁有可以與多個(gè)處理元件共享的 RAM 緩沖區(qū)。然而,在這種情況下,訪問(wèn)必須在軟件級(jí)別進(jìn)行管理,這反過(guò)來(lái)又會(huì)隨著系統(tǒng)的擴(kuò)展而導(dǎo)致軟件復(fù)雜性。這種軟件復(fù)雜性可能會(huì)導(dǎo)致系統(tǒng)錯(cuò)誤,從而導(dǎo)致影響 ISO 26262 安全目標(biāo)的錯(cuò)誤和故障。
最后,隨著系統(tǒng)變得越來(lái)越大,實(shí)現(xiàn)硬件緩存一致性技術(shù)通常很有用。它允許處理元素共享數(shù)據(jù),而無(wú)需直接軟件管理的開(kāi)銷(xiāo)。還有一種緩存一致性新技術(shù),現(xiàn)在在汽車(chē) SoC 中廣泛實(shí)施,它允許處理元件有效地相互共享數(shù)據(jù),并使用稱為代理緩存的專用可配置緩存作為連貫系統(tǒng)中的對(duì)等點(diǎn)。
除了內(nèi)存架構(gòu)之外,無(wú)論是通過(guò)緩沖區(qū)實(shí)現(xiàn)數(shù)據(jù)本地化還是緩存一致,片上互連也很重要。它優(yōu)化了整體數(shù)據(jù)流以保證服務(wù)質(zhì)量 (QoS),從而確保汽車(chē) SoC 滿足帶寬和延遲要求。
帶寬分配和延遲要求是關(guān)鍵任務(wù)汽車(chē)設(shè)計(jì)中的一個(gè)關(guān)鍵因素,尤其是當(dāng)某些處理可能是不確定的時(shí),例如神經(jīng)網(wǎng)絡(luò)和深度學(xué)習(xí)處理。在這里,片上互連在實(shí)現(xiàn) SoC 架構(gòu)方面發(fā)揮著至關(guān)重要的作用,該架構(gòu)可確保接近實(shí)時(shí)的性能,同時(shí)避免處理元件的數(shù)據(jù)不足。
2. 新技術(shù)汽車(chē)設(shè)計(jì)也為實(shí)施人工智能 (AI) 等新技術(shù)提供了動(dòng)力,因?yàn)闊o(wú)法手動(dòng)創(chuàng)建“if-then-else”規(guī)則來(lái)處理復(fù)雜的現(xiàn)實(shí)世界場(chǎng)景。可以處理高度復(fù)雜任務(wù)的人工智能算法正在被整合到自動(dòng)駕駛系統(tǒng)和其他必須在近實(shí)時(shí)領(lǐng)域做出決策的生命關(guān)鍵系統(tǒng)中。這就是為什么機(jī)器學(xué)習(xí)是人工智能的一個(gè)子集,是自動(dòng)駕駛汽車(chē)中最公開(kāi)可見(jiàn)的新應(yīng)用。
機(jī)器學(xué)習(xí)通過(guò)體驗(yàn)式學(xué)習(xí)實(shí)現(xiàn) ADAS 和自動(dòng)駕駛中的復(fù)雜任務(wù),而使用基于規(guī)則的編程幾乎不可能完成這些任務(wù)。但是機(jī)器學(xué)習(xí)需要對(duì)算法加速和數(shù)據(jù)流優(yōu)化進(jìn)行硬件定制。
因此,在基于機(jī)器學(xué)習(xí)的 SoC 設(shè)計(jì)中,ADAS 和自動(dòng)駕駛汽車(chē)架構(gòu)師正在通過(guò)添加更多類型的硬件加速器來(lái)更精細(xì)地分割算法。這些定制硬件加速器充當(dāng)異構(gòu)處理元素,并迎合支持實(shí)時(shí) 3D 映射、LiDAR 點(diǎn)云映射等功能的專用算法。
這些高度專業(yè)化的 IP 加速器可以在近乎實(shí)時(shí)的延遲范圍內(nèi)發(fā)送和接收數(shù)據(jù),并提供識(shí)別和分類對(duì)象所需的巨大帶寬,滿足嚴(yán)格且經(jīng)常相互沖突的 QoS 需求。在這里,芯片設(shè)計(jì)人員可以通過(guò)選擇加速什么、如何加速以及如何將該功能與 SoC 設(shè)計(jì)的其余部分互連來(lái)進(jìn)行競(jìng)爭(zhēng)和區(qū)分。
關(guān)于新技術(shù),還值得一提的是,神經(jīng)網(wǎng)絡(luò)已經(jīng)成為實(shí)現(xiàn)機(jī)器學(xué)習(xí)的最常見(jiàn)方式。神經(jīng)網(wǎng)絡(luò)在這里所做的是在自動(dòng)駕駛系統(tǒng)中實(shí)現(xiàn)深度學(xué)習(xí),使用專門(mén)的硬件加速器對(duì)行人和路標(biāo)等物體進(jìn)行分類。
圖 3:神經(jīng)網(wǎng)絡(luò)在汽車(chē) SoC 中實(shí)現(xiàn)專門(mén)的處理功能和數(shù)據(jù)流功能。圖片來(lái)源:Arteris IP。
深度學(xué)習(xí)是機(jī)器學(xué)習(xí)的一個(gè)分支,它涉及分層算法,以更好地理解數(shù)據(jù)。它獲取沒(méi)有任何意義的原始信息,并構(gòu)建分層表示,從而可以生成有關(guān)其他車(chē)輛、行人和整體路邊狀況的見(jiàn)解。
3. 功能安全安全在汽車(chē)行業(yè)是不容商榷的項(xiàng)目,這使得安全驗(yàn)證成為關(guān)鍵任務(wù)汽車(chē)應(yīng)用的 SoC 設(shè)計(jì)的關(guān)鍵部分。換言之,功能安全和符合 ISO 26262 標(biāo)準(zhǔn)對(duì)于服務(wù)于 ADAS 和自動(dòng)駕駛應(yīng)用的 SoC 設(shè)計(jì)至關(guān)重要。
ISO 26262 定義了汽車(chē)安全完整性等級(jí) (ASIL) 的五種分類——QM、A、B、C 和 D——其中 ASIL QM 提供基本的質(zhì)量管理措施,ASIL D 提供最嚴(yán)格的安全保護(hù),防止可能導(dǎo)致生命的故障- 威脅性傷害。
有與汽車(chē)功能安全相關(guān)的特定安全機(jī)制技術(shù),包括糾錯(cuò)碼(ECC)、組件的硬件復(fù)制、故障安全控制器和內(nèi)置自檢(BIST)。這些技術(shù)使汽車(chē) SoC 能夠遵守 ISO 26262 標(biāo)準(zhǔn)。
與以軟件為中心的方法相比,在芯片中實(shí)施功能安全機(jī)制具有許多優(yōu)勢(shì)。首先,它降低了整體復(fù)雜性,并使芯片制造商能夠更好地控制系統(tǒng)范圍的安全功能。
然而,與此同時(shí),隨著汽車(chē) SoC 變得越來(lái)越大、越來(lái)越復(fù)雜,IP 塊的數(shù)量越來(lái)越多,片上通信的作用變得越來(lái)越重要,不僅是為了滿足 QoS 要求,而且對(duì)于根據(jù) ISO 26262 設(shè)計(jì) SoC功能安全標(biāo)準(zhǔn)。片上互連在診斷覆蓋率中起著至關(guān)重要的作用,因?yàn)樗梢钥吹叫酒瑑?nèi)傳輸?shù)乃袛?shù)據(jù)。這允許互連 IP 發(fā)現(xiàn)并在某些情況下修復(fù)錯(cuò)誤,從而有助于滿足 ISO 26262 汽車(chē)功能安全的要求。
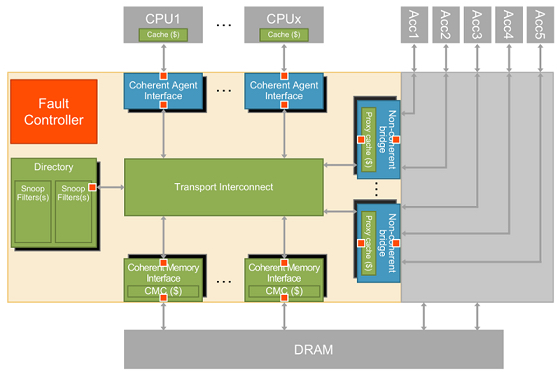
圖 4:這是片上互連為功能安全執(zhí)行數(shù)據(jù)流保護(hù)的方式。圖片來(lái)源:Arteris IP。
結(jié)論更好地理解本文中概述的問(wèn)題將使芯片設(shè)計(jì)人員能夠快速實(shí)現(xiàn) ADAS 和自動(dòng)駕駛應(yīng)用所需的復(fù)雜功能。它還將幫助設(shè)計(jì)人員根據(jù)特定的應(yīng)用要求定制 SoC 硬件架構(gòu)。
審核編輯 黃昊宇













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論