 電子發(fā)燒友App
電子發(fā)燒友App


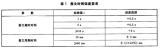
對于車載控制器來說,CAN周期的波動通常是有嚴格的標準,國標要求如下,基于國標,各個主機廠在這一塊稍微有些差異,不過大部分要求是不超過10%,比如10ms的報文,周期波動范圍是9~11ms。
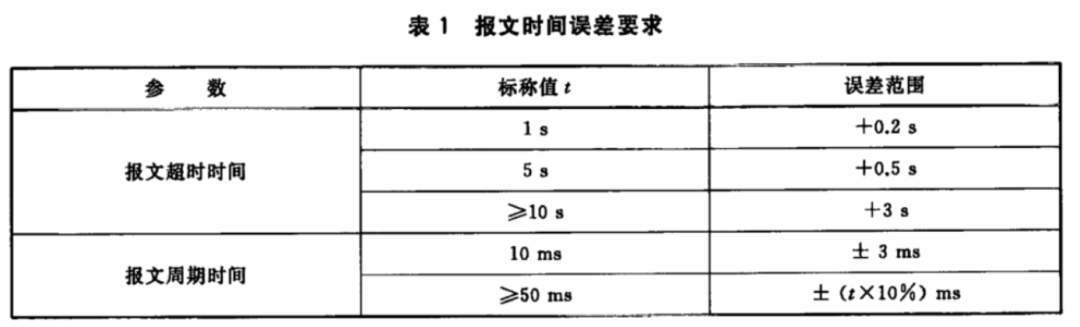
▲圖1?GBT 34658-2017中要求
那如果遇到報文周期偏大的問題該從何下手,或者說有哪些解決辦法呢?
首先來梳理一下CAN報文的發(fā)送流程,CAN通信協(xié)議棧的整體架構(gòu)如下圖所示,包括應用層,交互層,網(wǎng)絡層,數(shù)據(jù)鏈路層,物理層。
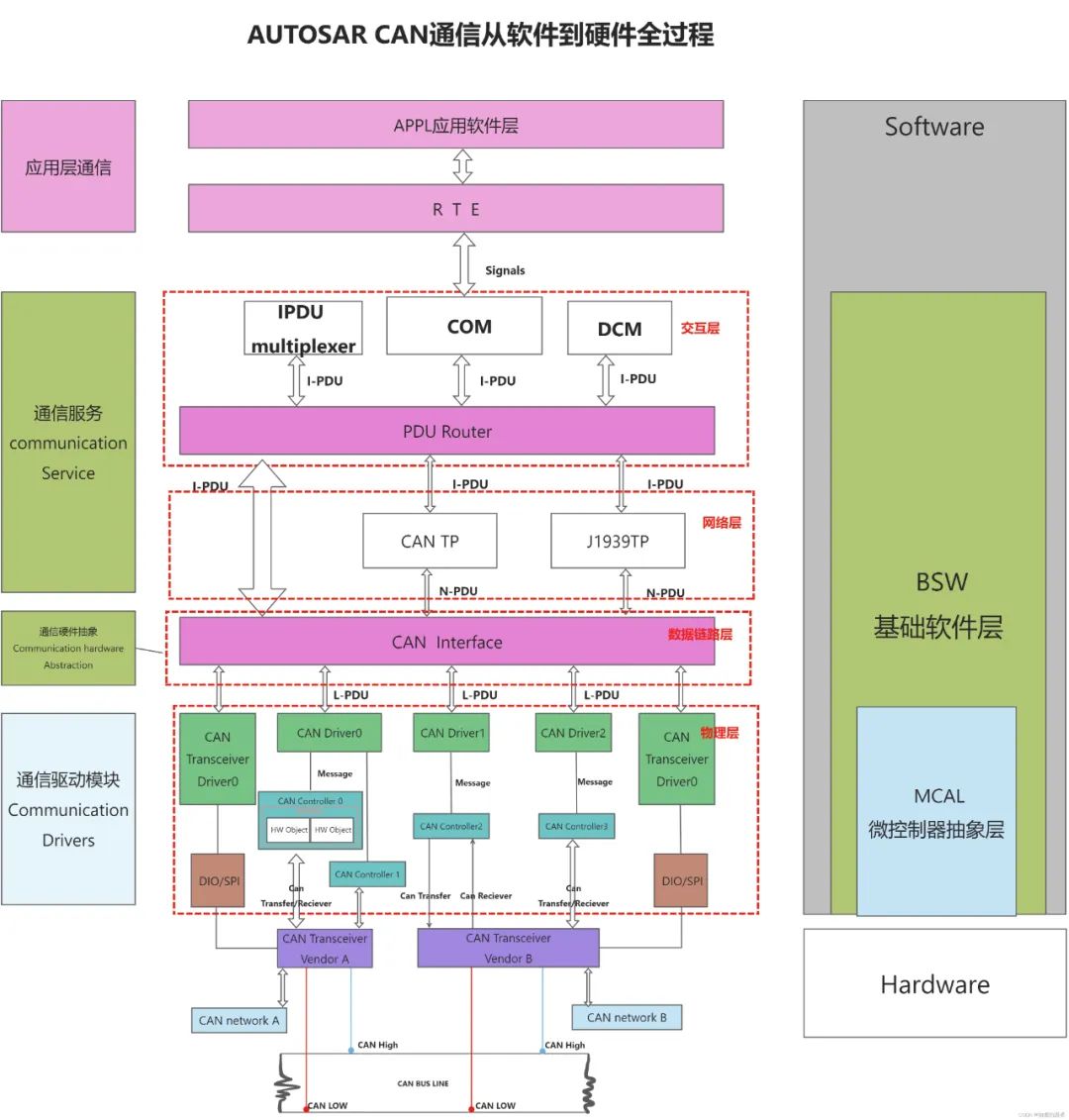
▲圖2?CAN通信從應用層到硬件的流程(來源CSDN)
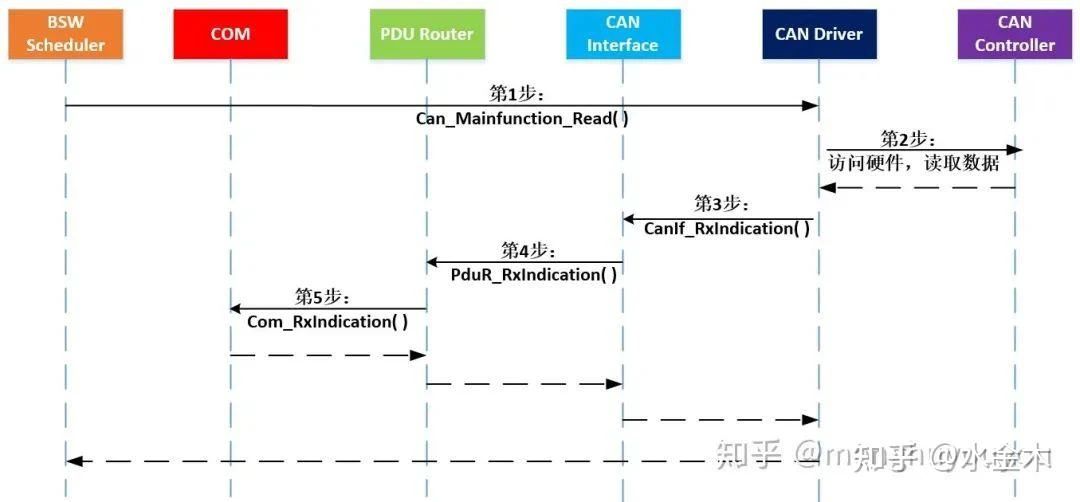
從各層的交互接口來看,報文接收polling接收方式的流程如下圖所示。
Can_MainFunction_Read函數(shù)周期調(diào)用訪問CanController(硬件)的寄存器,并讀取這些寄存器的數(shù)據(jù);數(shù)據(jù)讀取結(jié)束后,繼續(xù)調(diào)用CAN Interface模塊的CanIf_RxIndication函數(shù),將數(shù)據(jù)傳給CanIf模塊;CanIf再調(diào)用PduR模塊的PduR_RxIndication函數(shù),將數(shù)據(jù)傳到PduR模塊;PduR模塊路由到COM模塊,調(diào)用Com_RxIndication函數(shù),將數(shù)據(jù)傳到COM模塊,COM模塊將會把數(shù)據(jù)存入其緩存,供應用層軟件讀取使用。
如果是CAN報文的接收采用的是中斷方式,數(shù)據(jù)則是在中斷中接收,并調(diào)用?CanIf_RxIndication將數(shù)據(jù)向上傳遞。
▲圖3?CAN報文接收流程
報文發(fā)送流程如下圖所示。通過Com_ManfunctionTx將數(shù)據(jù)一層一層傳遞到CAN模塊,并且通過Polling或者中斷的形式將數(shù)據(jù)發(fā)送出去。
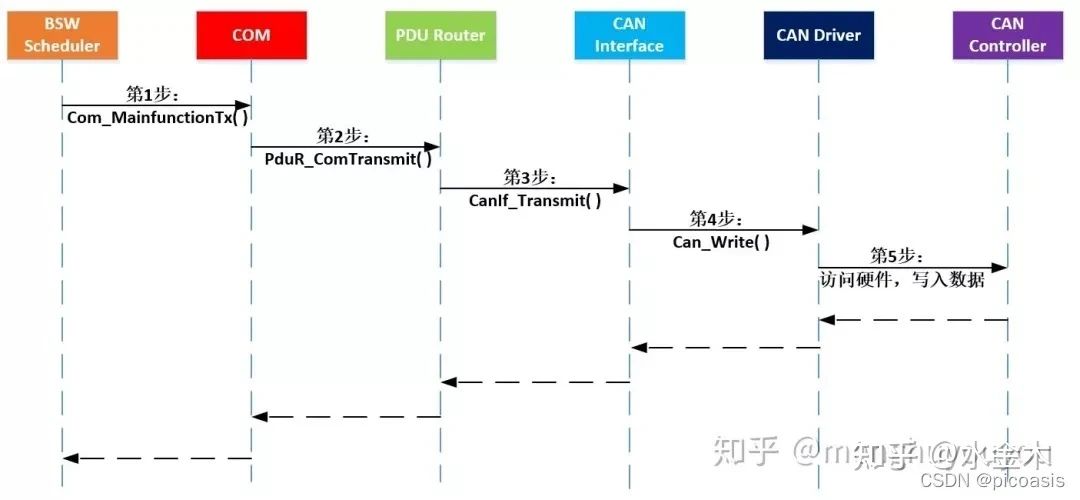
▲圖4?CAN報文發(fā)送流程
上述基本梳理了一下CAN報文收發(fā)的流程,那下面就來分析一下總線報文周期波動過大問題的可能問題點。
第一種可能是同一節(jié)點發(fā)送報文很多,并且大部分報文周期都相同,這就導致同一時刻,大量報文需要發(fā)送,導致報文發(fā)送阻塞。如果是這種情況的話,可以在Com層對報文的發(fā)送增加offset,offset一般是Com周期的倍速,這里可以適當?shù)卣{(diào)低Com Mainfunction的周期。
第二種可能就是需要檢查Canif和CAN是否大量報文發(fā)送僅使用一個發(fā)送緩沖區(qū),并且采用FIFO的方式進出,這樣就會出現(xiàn)報文周期波動,其影響的原因是,假如大CANID的報文在前,小CANID的報文在后,大ID由于總線仲裁,無法發(fā)送,會導致小CANID的無法發(fā)送,從現(xiàn)象來看就是報文優(yōu)先就翻轉(zhuǎn)。
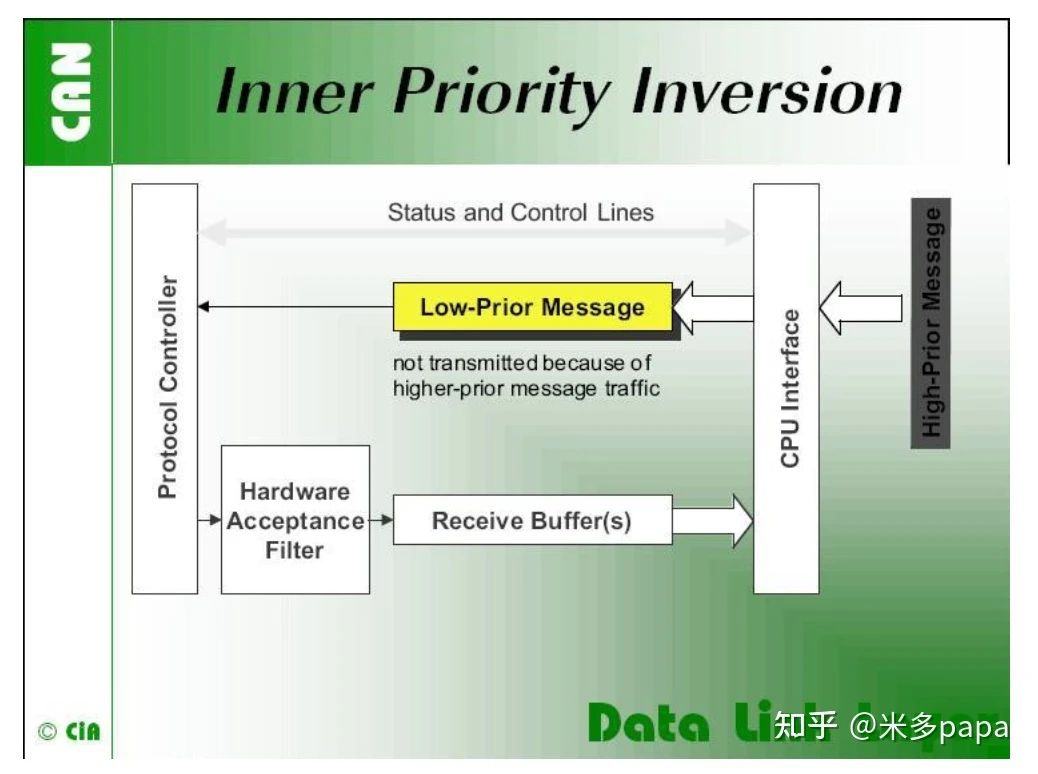
▲圖4?內(nèi)部優(yōu)先級翻轉(zhuǎn)
這里還可以從總線log來分析,查看小CANID周期間隔點,發(fā)送的報文是哪些,如果那會兒大ID在發(fā),那就有可能是這種原因。
第三種有可能系統(tǒng)負載的原因,比如系統(tǒng)負載過高,導致Com_MainFuncionTx的調(diào)度發(fā)生波動,導致總線上報文周期波動,或者是以中斷的模式發(fā)送,中斷優(yōu)先級過低,導致被其他高優(yōu)先級的中斷打斷,導致報文無法發(fā)送,這里可以通過打時間戳的形式來確認,在任務中打時間搓或者是在idle 任務中打來實錘。
如果是這種,從問題角度來看,就是降負載,或者調(diào)高任務或者中斷的優(yōu)先級。更深層次來看,就是系統(tǒng)設計有問題,導致基本的報文發(fā)送波動,需要從系統(tǒng)層面優(yōu)化。
審核編輯:劉清










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論