 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
“Segbot”是 UIUC 的 SE 423 級平衡 segway 機器人。segbot 由 Dan Block (d-block@illinois.edu) 教授設(shè)計的電路板和 F28379D 微控制器組成,該微控制器是德州儀器 C2000 系列的一部分。該項目的目標是通過藍牙向 segbot 無線發(fā)送轉(zhuǎn)向命令。
藍牙通訊
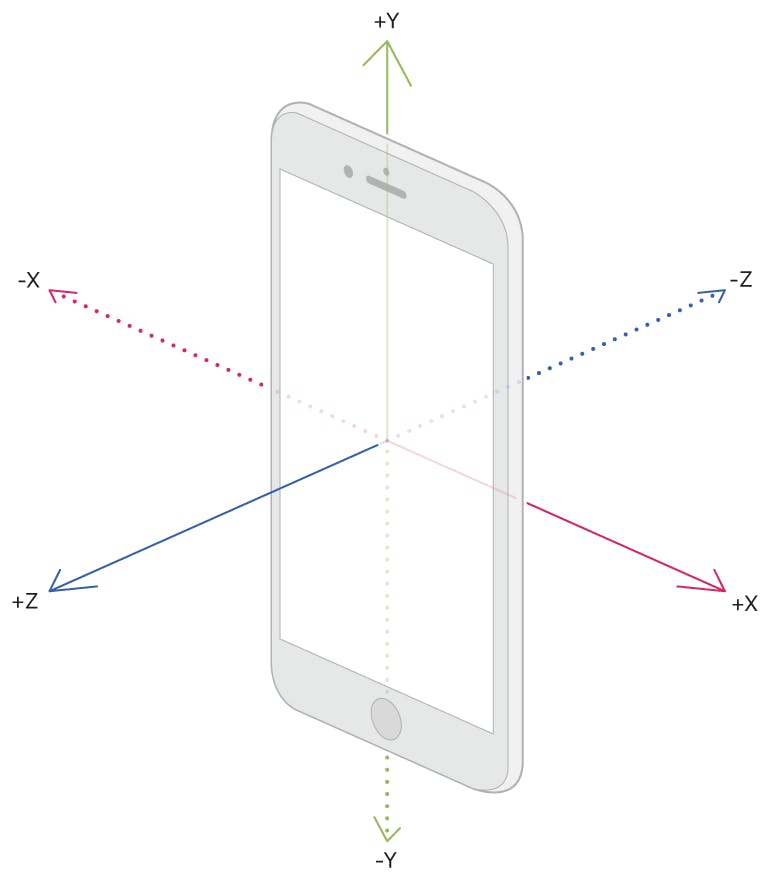
藍牙 LE UART Friend 與 Bluefruit Connect 應(yīng)用程序兼容。字符通過UART傳輸?shù)絪egbot,可以在計算機終端上查看。從 segbot 傳輸?shù)淖址梢栽趹?yīng)用程序中查看或繪制。在我的演示中,我從手機發(fā)送了加速度計數(shù)據(jù),并用它來引導 segbot 通過障礙物。
傳入的加速度計數(shù)據(jù)由前綴“!A”標識,后跟三個浮點值。由于數(shù)據(jù)是通過 UART 傳輸?shù)模虼藷o法立即解釋原始值。實現(xiàn)了一個聯(lián)合,將六個 16 位整數(shù)與三個 32 位浮點數(shù)存儲在內(nèi)存中的同一位置。
typedef union phonedata_s{
uint16_t rawdata[6];
float fltdata[3];
}phonedata_t;
phonedata_t phoneaccel; //use new data type defined in union
下面的代碼在串行接收函數(shù)中。首先,傳入的 8 位值保存在過去狀態(tài)的數(shù)組中。然后通過查找前綴“!A”來篩選這些值以確定它是否是加速度計數(shù)據(jù)。然后,與加速度計數(shù)據(jù)對應(yīng)的值組合成 16 位整數(shù)并保存為上面定義的新數(shù)據(jù)類型。然后,這些值存儲為浮點數(shù)。
if((past[0] == '!')&&(past[1] == 'A')){
//incoming accelerometer data
//X
phoneaccel.rawdata[0] = (past[3]<<8)|past[2];
phoneaccel.rawdata[1] = (past[5]<<8)|past[4];
//Y
phoneaccel.rawdata[2] = (past[7]<<8)|past[6];
phoneaccel.rawdata[3] = (past[9]<<8)|past[8];
//Z
phoneaccel.rawdata[4] = (past[11]<<8)|past[10];
phoneaccel.rawdata[5] = (past[13]<<8)|past[12];
ble_x = phoneaccel.fltdata[0];
ble_y = phoneaccel.fltdata[1];
ble_z = phoneaccel.fltdata[2];
操舵
在加速度計數(shù)據(jù)被標記后,仍然在串行接收功能中,對應(yīng)于 x、y 和 z 方向上的加速度的三個浮點數(shù)被解釋為 segbot 的轉(zhuǎn)向指令。segbot 通過更改“turnrate”和“FwdBackOffset”值來驅(qū)動。假設(shè)手機將被側(cè)向操縱,y 加速度的變化對應(yīng)于轉(zhuǎn)向指令,z 加速度的變化對應(yīng)于向前和向后的運動。
?
當加速度在指定方向達到某個閾值時,發(fā)出轉(zhuǎn)向指令。閾值是這樣的,即故意改變手機位置將引導 segbot,但方向的小幅波動不會。轉(zhuǎn)向速度已調(diào)整為我認為最容易轉(zhuǎn)向的速度,但可以調(diào)整為更快或更慢。
//Interpret phone accel data as steering instructions
if(ble_y >= 0.3){
//turn left
turnrate = -4.0;
}else if(ble_y <= -0.3){
//turn right
turnrate = 4.0;
}else if(fabs(ble_y) < 0.3){
//don't turn
turnrate = 0;
}
if(ble_z <= -0.3){
//go forward
FwdBackOffset = -1.0;
}else if(ble_z >= 0.3){
//go backward
FwdBackOffset = 1.0;
}else if(fabs(ble_z) < 0.3){
//don't go forward or backward
FwdBackOffset = 0;
}
接線
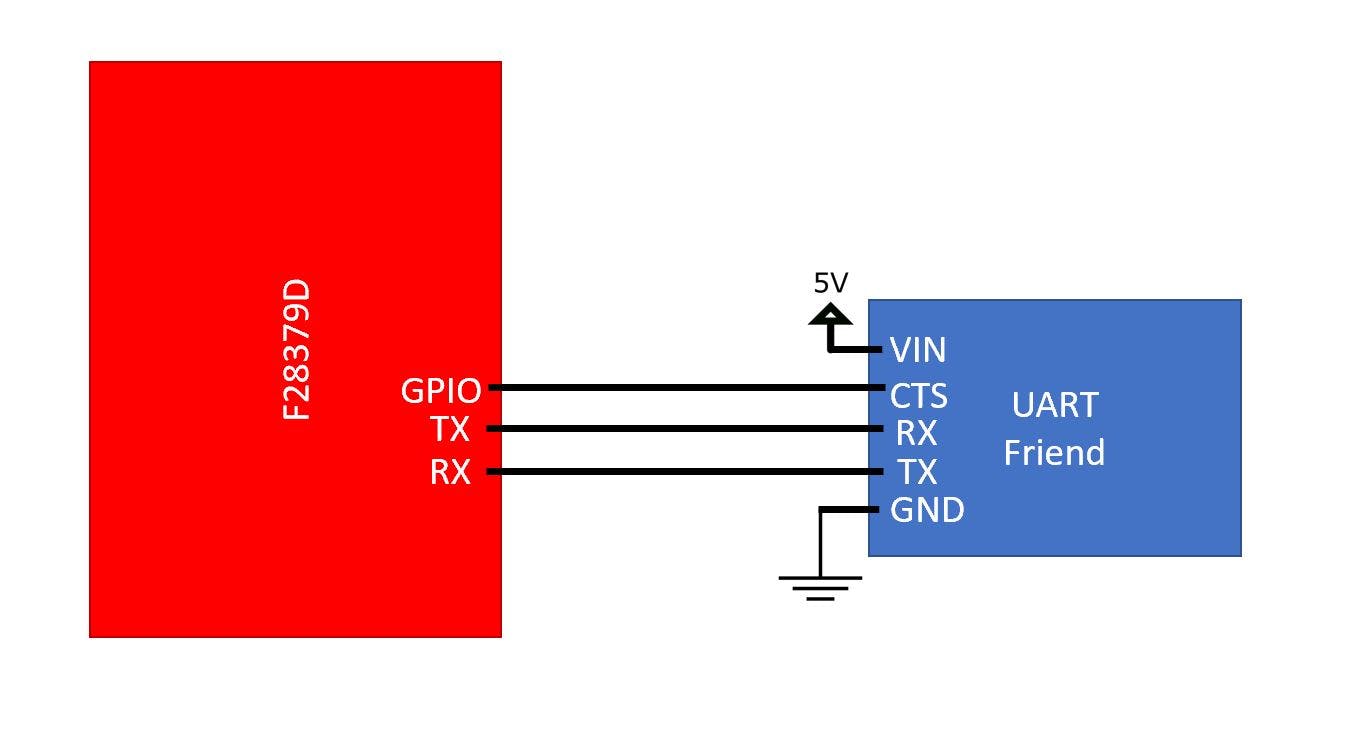
上圖顯示了 UART Friend 到 segbot 的接線圖。藍牙傳感器連接到 5 V 電源。芯片的接收線連接到segbot的發(fā)送線,發(fā)送線連接到segbot的接收線,對應(yīng)F28739D處理器的Serial C。為了在數(shù)據(jù)模式下工作,藍牙芯片的 CTS 引腳必須接地。它連接到 GPIO 引腳并設(shè)置為低電平,從而可以通過編輯代碼輕松更改模式。
分段機器人組件
慶典
當 segbot 完成障礙賽時,它會通過蜂鳴器播放 Kool & The Gang 的“Celebration”并跳一段小舞。當麥克風聽到我的歡呼聲時會觸發(fā)此響應(yīng)。這是由大約 625 Hz 的頻率識別的,我使用頻率分析儀應(yīng)用程序發(fā)現(xiàn)了這個頻率。麥克風以 10 kHz 的速率進行采樣,并通過 Goertzel 算法傳遞數(shù)據(jù),該算法搜索 625 Hz 的目標頻率。在我的另一個項目中有更多關(guān)于音符檢測以及歌曲和舞蹈的信息,鏈接在這里。
- 檢測機器人開源分享
- 坦克機器人開源分享
- 掃地機器人開源資料 44次下載
- 機器人守衛(wèi)開源分享
- 簡單的藍牙控制機器人開源
- 伺服機器人開源分享
- 堆肥機器人開源分享
- 藍牙控制機器人開源
- 英雄機器人開源
- 機器人開源案例
- 藍牙控制機器人車開源分享
- 藍牙控制機器人開源分享
- Arduino機器人開源分享
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 18次下載
- 機器人伺服馬達的轉(zhuǎn)向控制原理分析方案 1次下載
- 字節(jié)發(fā)布機器人領(lǐng)域首個開源視覺-語言操作大模型,激發(fā)開源VLMs更大潛能 562次閱讀
- 機器人技術(shù)中常用的路徑規(guī)劃算法的開源庫 1188次閱讀
- 鑄造機器人是什么?選擇工業(yè)機器人應(yīng)該考慮的方向 1186次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2236次閱讀
- dfrobotSparki機器人套裝簡介 2207次閱讀
- 工業(yè)機器人編程入門_工業(yè)機器人的編程要求 9787次閱讀
- 醫(yī)用機器人的定義_醫(yī)用機器人發(fā)展 3257次閱讀
- 醫(yī)用機器人的功能_醫(yī)用機器人分類 2462次閱讀
- 機器人控制器有哪些類型_機器人控制器發(fā)展 1.2w次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8322次閱讀
- 機器視覺的機器人取代四臺傳統(tǒng)的火焰處理機器人 3370次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 7029次閱讀
- 關(guān)于被動同心轉(zhuǎn)向式多履帶全向移動機器人的設(shè)計 9148次閱讀
- 軟體機器人 前所未見的機器人 3770次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 2錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 3錦銳CA51F005 SDK開發(fā)包
- 19.47 MB | 3次下載 | 1 積分
- 4蘋果iphone 11電路原理圖
- 4.98 MB | 3次下載 | 2 積分
- 5基礎(chǔ)模擬電子電路
- 3.80 MB | 3次下載 | 1 積分
- 6RA-Eco-RA6M4-100PIN-V1.0開發(fā)板資料
- 34.89 MB | 1次下載 | 免費
- 7STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊
- 3.32 MB | 1次下載 | 免費
- 8聯(lián)想A820t手機維修圖紙包括主板原理圖 尾板原理圖 點位圖
- 0.62 MB | 次下載 | 5 積分
本月
- 1AI智能眼鏡產(chǎn)業(yè)鏈分析
- 4.43 MB | 383次下載 | 免費
- 2蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 296次下載 | 5 積分
- 3貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 94次下載 | 1 積分
- 4長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 91次下載 | 5 積分
- 5涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 6錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 7AO4803A雙P通道增強型場效應(yīng)晶體管的數(shù)據(jù)手冊
- 0.11 MB | 28次下載 | 2 積分
- 8長虹液晶彩電LS29機芯的技術(shù)資料說明
- 3.42 MB | 16次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191388次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論