 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
該項目是 ME 461(機械系統的計算機控制)的最終作業的結果,這是伊利諾伊大學提供的一門課程。
介紹
Noot Shoot是一款云臺上的橡皮筋射擊游戲,使用計算機視覺瞄準特定顏色。云臺使用 HiTec HS-311 伺服系統移動,安裝在從 servocity 獲得的塊中。攝像頭被擰在前面。另一個伺服器用作射手的觸發器。
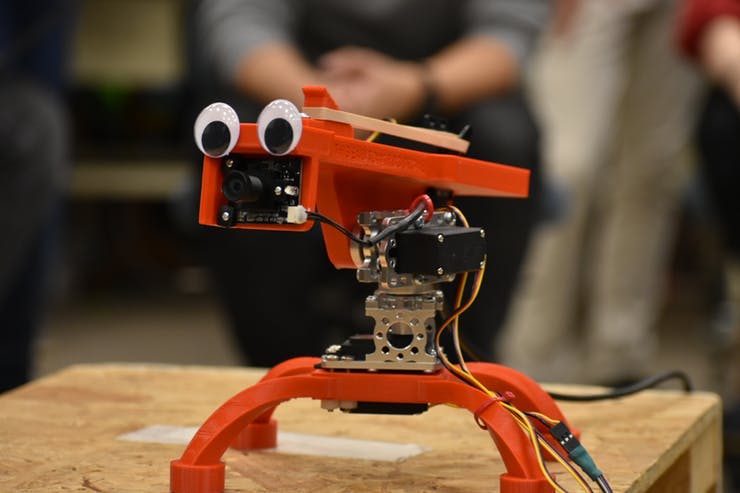
伺服系統使用德州儀器 (TI) 的微控制器 MSP430 進行定向,而 Orange Pi Zero 則用于與相機接口。舞臺和腿是 3D 打印的。
系統輸入
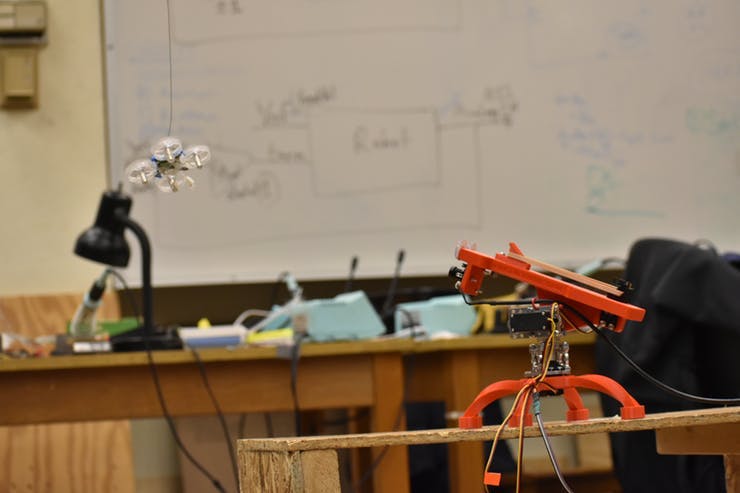
系統的輸入是來自攝像機的實時饋送。在 Pi 中連續運行的 C++ 程序逐幀讀取此提要并計算我們感興趣的對象的中心坐標。在我們的例子中,我們將顏色范圍定位在一系列 HSV 值之間:(239*, 103 , 103) 和 (15*, 255, 255)。這對應于 HSV 光譜中的亮粉色。該程序計算幀中的所有粉紅色像素,如果有超過 60 個活動像素,則計算對象的質心(這是必要的,因此環境中的噪聲不會被視為對象)。這些坐標使用 I2C 通信協議發送到 MSP430。
其他輸入是兩個按鈕。一個用于手動拍攝,另一個用于改變狀態。下一節將詳細介紹更多信息。
比例控制器
一旦 MSP430 接收到物體的中心坐標,x 軸和 y 軸的誤差就會計算為相機框架中心與物體中心之間的差值。誤差的大小表明需要多少轉彎。因此,我們將轉率計算為誤差和我們調整的比例增益的乘積。然后從先前發送的伺服命令中減去該轉速,并將該新值設置為伺服的新目的地。我們需要減去,因為誤差和舵機的正角運動方向相反。
errorX = 160 - rxlong1; // rxlong1 is the x-coordinate of the object in frame.
errorY = 120 - rxlong2; // rxlong2 is the y-coordinate of the object in frame.
turnrateX = kpx*errorX; // kpx and kpy are gain values that need to be tuned.
turnrateY = kpy*errorY;
currX = prevX - (turnrateX * 20)/1000; //We multiply with 0.02 based on the loop time
currY = prevY - (turnrateY * 20)/1000;
狀態機
我們將控制程序包裝在狀態機中。射手可以分為兩種狀態。它要么正在主動識別要射擊的目標,要么處于重新加載模式,此時載物臺停止移動,以便用戶可以加載下一個橡皮筋。射手以主動觀察模式開始。以下是導致狀態改變的條件:
從主動尋找到重裝模式:
按狀態更改按鈕。
- 按狀態更改按鈕。
按下手動拍攝按鈕。這會啟動橡皮筋,并且射手會在很短的延遲后進入重新加載模式。
- 按下手動拍攝按鈕。這會啟動橡皮筋,并且射手會在很短的延遲后進入重新加載模式。
x 軸和 y 軸的誤差小于定義的閾值超過 3 秒。這意味著目標要么移動非常緩慢,要么根本不動。在這種情況下,射擊者會自動射擊橡皮筋,然后在很短的延遲后進入裝彈模式。
- x 軸和 y 軸的誤差小于定義的閾值超過 3 秒。這意味著目標要么移動非常緩慢,要么根本不動。在這種情況下,射擊者會自動射擊橡皮筋,然后在很短的延遲后進入裝彈模式。
從重新加載模式到積極尋找:
按狀態更改按鈕(這是唯一的方法)。
- 按狀態更改按鈕(這是唯一的方法)。
更多 MSP430 實施細節
結合三個伺服系統:我們使用定時器 B 來實現平移和傾斜伺服系統。載波頻率設置為 20 ms。定時器設置為向上模式,輸出模式設置為重置/設置。計時器 A 也進行了類似的調整,以控制射手伺服系統。
按鈕連接:如上所述,我們使用了 2 個按鈕。為此,我們將引腳 2.4 和 2.5 定義為啟用和下拉電阻器的輸入引腳。這些按鈕還連接到電容器以防止彈跳。
?
- Arduino Arduboy控制臺開源分享
- Eurorack臺式調音臺開源分享
- Arduino DM控制臺開源分享
- 微型焊臺開源項目
- 亮風臺公司介紹
- 基于FreeRTOS的嵌入式云臺控制系統設計
- 開源網絡協議分析器WireShark軟件下載 15次下載
- 開源課程行動倡議及科學導論綜述 6次下載
- 礦用云臺解碼驅動器的設計詳析 16次下載
- 私有云平臺資源監控與優化系統 3次下載
- MiNi 3D 機載云臺說明書 3次下載
- 云計算與開源 0次下載
- 基于DSP 和陀螺儀的視覺云臺設計
- 基于ATmega64云臺板卡測試平臺的設計
- 基于ATmega64云臺板卡測試平臺的設計
- 用于SLAM中點云地圖綜合評估的開源框架 294次閱讀
- 一文概敘自制舵機云臺 520次閱讀
- 前沿開源技術領域的開源大數據一一解讀 1180次閱讀
- 如何使用兩個舵機為ESP32-CAM創建云臺控制 1.4w次閱讀
- 編寫機智云安卓開源框架的UI界面 1777次閱讀
- dfrobot全方位蜂巢云臺簡介 1187次閱讀
- dfrobot迷你2自由度云臺簡介 1630次閱讀
- dfrobot云臺舵機支架套件簡介 1363次閱讀
- dfrobot2自由度DF05BB舵機云臺介紹 4387次閱讀
- 開源過程中的5件注意事項 3621次閱讀
- 開源與云的一些爭論 3292次閱讀
- DFRobot長U型支架組合成云臺介紹 2159次閱讀
- 微雪電子樹莓派云臺擴展板|Pan-Tilt HAT介紹 3562次閱讀
- 步進電機改善暫態特性的方法 1472次閱讀
- NASA的開源軟件是什么?NASA的開源軟件的詳細分析 7444次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論