 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻使用Sipeed MaiX板進(jìn)行對(duì)象檢測(cè)(Kendryte K210)
資料介紹
描述
作為我之前關(guān)于使用 Sipeed MaiX 板進(jìn)行圖像識(shí)別的文章的延續(xù),我決定寫另一個(gè)教程,重點(diǎn)是對(duì)象檢測(cè)。但請(qǐng)記住,我不是 Kendryte 或 Sipeed 開發(fā)團(tuán)隊(duì)的成員,無法回答與他們的產(chǎn)品相關(guān)的所有問題。本質(zhì)上, aXeleRate是基于我用于訓(xùn)練圖像識(shí)別/對(duì)象檢測(cè)模型的腳本集合 - 組合成一個(gè)框架并針對(duì) Google Colab 上的工作流程進(jìn)行了優(yōu)化。使用起來更方便,更新更及時(shí)。
2022 年 3 月 29 日更新。我盡我所能定期更新我的文章,并根據(jù)您在 YouTube/Hackster 評(píng)論部分的反饋。如果您想表達(dá)對(duì)這些努力的支持和贊賞,請(qǐng)考慮給我買杯咖啡(或披薩):)。
對(duì)于舊版本的文章,你仍然可以在steemit.com 上看到。
第 1 步:對(duì)象檢測(cè)模型架構(gòu)說明
圖像識(shí)別(或圖像分類)模型將整個(gè)圖像作為輸入,并輸出我們?cè)噲D識(shí)別的每個(gè)類別的概率列表。如果我們感興趣的對(duì)象占據(jù)了圖像的大部分并且我們不太關(guān)心它的位置,這將非常有用。但是,如果我們的項(xiàng)目(比如人臉跟蹤相機(jī))不僅需要了解圖像中對(duì)象的類型,還需要了解其坐標(biāo),該怎么辦。那么需要檢測(cè)多個(gè)對(duì)象(例如計(jì)數(shù))的項(xiàng)目呢?
這是對(duì)象檢測(cè)模型派上用場(chǎng)的時(shí)候。在本文中,我們將使用 YOLO(你只看一次)架構(gòu),并重點(diǎn)解釋這個(gè)特定架構(gòu)的內(nèi)部機(jī)制。
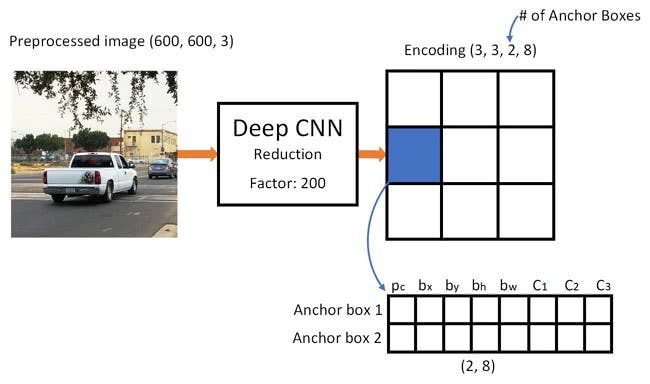
我們?cè)噲D確定圖片中存在哪些對(duì)象以及它們的坐標(biāo)。由于機(jī)器學(xué)習(xí)不是魔術(shù),也不是“思維機(jī)器”,而只是一種使用統(tǒng)計(jì)數(shù)據(jù)優(yōu)化功能(神經(jīng)網(wǎng)絡(luò))以更好地解決特定問題的算法。我們需要對(duì)這個(gè)問題進(jìn)行解釋,使其更“可優(yōu)化”。這里的一個(gè)天真的方法是讓算法最小化它的預(yù)測(cè)和對(duì)象的正確坐標(biāo)之間的損失(差異)。只要我們?cè)趫D像中只有一個(gè)對(duì)象,這就會(huì)很好地工作。對(duì)于多個(gè)對(duì)象,我們采用不同的方法——我們添加網(wǎng)格并讓我們的網(wǎng)絡(luò)預(yù)測(cè)每個(gè)網(wǎng)格中對(duì)象的存在(或不存在)。好聽,但是仍然給網(wǎng)絡(luò)留下了太多的不確定性——如何輸出預(yù)測(cè)以及在一個(gè)網(wǎng)格單元內(nèi)有多個(gè)中心的對(duì)象時(shí)該怎么辦?我們需要再添加一個(gè)約束——所謂的錨。錨點(diǎn)是初始大小(寬度、高度),其中一些(最接近對(duì)象大小)將調(diào)整為對(duì)象大小 - 使用神經(jīng)網(wǎng)絡(luò)的一些輸出(最終特征圖)。
所以,這是一個(gè)關(guān)于 YOLO 架構(gòu)神經(jīng)網(wǎng)絡(luò)對(duì)圖像執(zhí)行對(duì)象檢測(cè)時(shí)發(fā)生了什么的頂級(jí)視圖。根據(jù)特征提取器網(wǎng)絡(luò)檢測(cè)到的特征,對(duì)每個(gè)網(wǎng)格單元進(jìn)行一組預(yù)測(cè),包括錨點(diǎn)偏移量、錨點(diǎn)概率和錨點(diǎn)類別。然后我們丟棄低概率的預(yù)測(cè),瞧!
第 2 步:準(zhǔn)備環(huán)境
aXeleRate 基于 penny4860 的精彩項(xiàng)目,SVHN yolo-v2 數(shù)字檢測(cè)器。 aXeleRate 將這種在 Keras 中的 YOLO 檢測(cè)器實(shí)現(xiàn)提升到一個(gè)新的水平,并使用其方便的配置系統(tǒng)來執(zhí)行圖像識(shí)別/對(duì)象檢測(cè)和具有各種后端的圖像分割網(wǎng)絡(luò)的訓(xùn)練和轉(zhuǎn)換。
使用 aXeleRate 有兩種方法:在 Ubuntu 機(jī)器上本地運(yùn)行或在 Google Colab 中運(yùn)行。要在 Google Colab 中運(yùn)行,請(qǐng)查看以下示例:
PASCAL-VOC 目標(biāo)檢測(cè) Colab Notebook
現(xiàn)在在本地訓(xùn)練您的模型并將其導(dǎo)出以用于硬件加速也變得更加容易。我強(qiáng)烈建議您在 Anaconda 環(huán)境中安裝所有必要的依賴項(xiàng),以使您的項(xiàng)目與其他項(xiàng)目分開并避免沖突。
安裝完成后,新建環(huán)境:
conda create -n yolo python=3.7
讓我們激活新環(huán)境
conda activate yolo
bash shell 前的前綴將與環(huán)境名稱一起出現(xiàn),表明您現(xiàn)在在該環(huán)境中工作。
在本地機(jī)器上安裝 aXeleRate
pip install git+https://github.com/AIWintermuteAI/aXeleRate
然后運(yùn)行它來下載訓(xùn)練和推理所需的腳本:
git clone https://github.com/AIWintermuteAI/aXeleRate.git
您可以使用 aXeleRate 文件夾中的 tests_training.py 運(yùn)行快速測(cè)試。它將為每種模型類型運(yùn)行訓(xùn)練和推理,保存和轉(zhuǎn)換訓(xùn)練好的模型。由于它只訓(xùn)練 5 個(gè) epoch 并且數(shù)據(jù)集非常小,您將無法獲得有用的模型,但此腳本僅用于檢查是否存在錯(cuò)誤。
第 3 步:使用 Keras 訓(xùn)練對(duì)象檢測(cè)模型
現(xiàn)在我們可以使用配置文件運(yùn)行訓(xùn)練腳本。由于 YOLO 目標(biāo)檢測(cè)器的 Keras 實(shí)現(xiàn)相當(dāng)復(fù)雜,因此我將解釋如何配置訓(xùn)練并描述相關(guān)模塊,而不是解釋每個(gè)相關(guān)的代碼,以防您想自己對(duì)它們進(jìn)行一些更改。
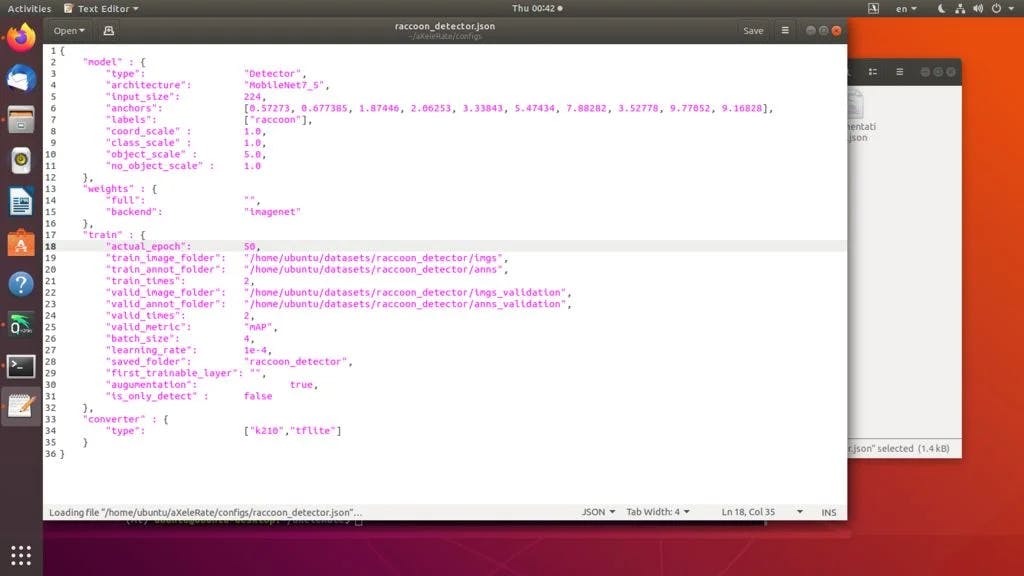
讓我們從一個(gè)玩具示例開始,訓(xùn)練一個(gè)浣熊探測(cè)器。/config 文件夾內(nèi)有一個(gè)配置文件 raccoon_detector.json。我們選擇 MobileNet7_5 作為架構(gòu)(其中 7_5 是原始 Mobilenet 實(shí)現(xiàn)的 alpha 參數(shù),控制網(wǎng)絡(luò)的寬度)和 224x224 作為輸入大小。讓我們看一下配置中最重要的參數(shù):
類型是模型前端 - 分類器、檢測(cè)器或 Segnet
架構(gòu)是模型后端(特征提取器)
- 全 Yolo - Tiny Yolo - MobileNet1_0 - MobileNet7_5 - MobileNet5_0 - MobileNet2_5 - SqueezeNet - VGG16 - ResNet50
有關(guān)錨點(diǎn)的更多信息,請(qǐng)?jiān)诖颂庨喿x https://github.com/pjreddie/darknet/issues/568
標(biāo)簽是數(shù)據(jù)集中存在的標(biāo)簽。重要提示:請(qǐng)列出數(shù)據(jù)集中存在的所有標(biāo)簽。
object_scale確定對(duì)對(duì)象預(yù)測(cè)器置信度的錯(cuò)誤預(yù)測(cè)懲罰多少
no_object_scale確定對(duì)非對(duì)象預(yù)測(cè)器的置信度的錯(cuò)誤預(yù)測(cè)懲罰多少
coord_scale確定對(duì)錯(cuò)誤位置和大小預(yù)測(cè)(x、y、w、h)的懲罰程度
class_scale決定對(duì)錯(cuò)誤的類預(yù)測(cè)懲罰多少
增強(qiáng)- 圖像增強(qiáng)、調(diào)整大小、移動(dòng)和模糊圖像,以防止過度擬合并在數(shù)據(jù)集中有更大的多樣性。
train_times, validation_times - 重復(fù)數(shù)據(jù)集的次數(shù)。如果您有增強(qiáng)功能,則很有用
啟用
first_trainable_layer - 如果您使用的是預(yù)訓(xùn)練的特征網(wǎng)絡(luò),則允許您凍結(jié)某些層
現(xiàn)在我們需要下載我在Google Drive上共享的數(shù)據(jù)集(原始數(shù)據(jù)集),這是一個(gè)浣熊檢測(cè)數(shù)據(jù)集,包含 150 張帶注釋的圖片。
確保相應(yīng)地更改配置文件(train_image_folder、train_annot_folder)中的行,然后使用以下命令(來自 aXeleRate 文件夾)開始訓(xùn)練:
python axelerate/train.py -c configs/raccoon_detector.json
train.py 從 .json 文件中讀取配置并使用 axelerate/networks/yolo/yolo_frontend.py 腳本訓(xùn)練模型。yolo/backend/loss.py 是實(shí)現(xiàn)自定義損失函數(shù)的地方,yolo/backend/network.py 是創(chuàng)建模型的地方(輸入、特征提取器和檢測(cè)層放在一起)。axelerate/networks/common_utils/fit.py 是實(shí)現(xiàn)訓(xùn)練過程的腳本,而 axelerate/networks/common_utils/feature.py 包含特征提取器。如果您打算使用帶有 K210 芯片和 Micropython 固件的訓(xùn)練模型,由于內(nèi)存限制,您可以在 MobileNet(2_5、5_0 和 7_5)和 TinyYolo 之間進(jìn)行選擇,但我發(fā)現(xiàn) MobileNet 提供了更好的檢測(cè)精度。
由于它是一個(gè)玩具示例并且僅包含 150 張浣熊的圖像,因此即使沒有 GPU,訓(xùn)練過程也應(yīng)該非常快,盡管準(zhǔn)確度遠(yuǎn)非一流。對(duì)于與工作相關(guān)的項(xiàng)目,我訓(xùn)練了一個(gè)交通標(biāo)志檢測(cè)器和一個(gè)數(shù)字檢測(cè)器,這兩個(gè)數(shù)據(jù)集都包含了數(shù)千個(gè)訓(xùn)練示例。
第 4 步:將其轉(zhuǎn)換為 .kmodel 格式
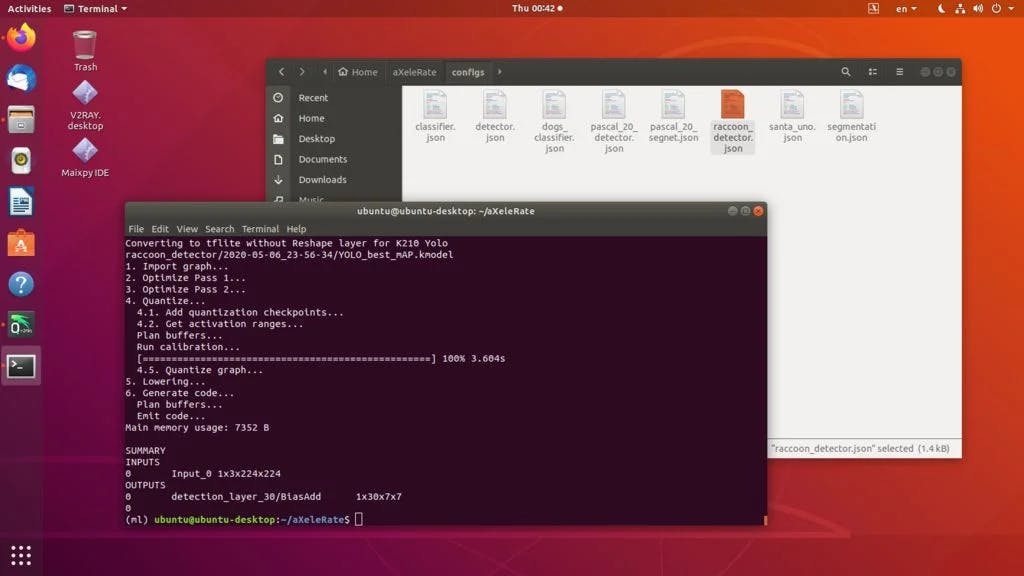
使用aXeleRate,模型轉(zhuǎn)換是自動(dòng)進(jìn)行的——這可能是與舊版訓(xùn)練腳本最大的不同!另外,您可以將模型文件和訓(xùn)練圖整齊地保存在項(xiàng)目文件夾中。此外,我確實(shí)發(fā)現(xiàn)驗(yàn)證準(zhǔn)確度有時(shí)無法估計(jì)對(duì)象檢測(cè)的模型實(shí)際性能,這就是為什么我添加 mAP 作為對(duì)象檢測(cè)模型的驗(yàn)證指標(biāo)的原因。您可以在此處閱讀有關(guān) mAP 的更多信息。
如果 mAP、平均精度(我們的驗(yàn)證指標(biāo))在 20 個(gè) epoch 內(nèi)沒有提高,則訓(xùn)練將提前停止。每次 mAP 改進(jìn)時(shí),模型都會(huì)保存在項(xiàng)目文件夾中。訓(xùn)練結(jié)束后,aXeleRate 自動(dòng)將最佳模型轉(zhuǎn)換為指定格式 - 您現(xiàn)在可以選擇“tflite”、“k210”或“edgetpu”。
現(xiàn)在到最后一步,在 Sipeed 硬件上實(shí)際運(yùn)行我們的模型!
第 5 步:在 Micropython 固件上運(yùn)行
可以使用 C 代碼使用我們的對(duì)象檢測(cè)模型運(yùn)行推理,但為了方便起見,我們將使用 Micropython 固件和 MaixPy IDE 代替。
從這里下載MaixPy IDE和從這里下載 micropython 固件。您可以使用 python 腳本 kflash.py 燒錄固件或在此處下載單獨(dú)的 GUI flash 工具。
將 model.kmodel 復(fù)制到 SD 卡的根目錄,并將 SD 卡插入 Sipeed Maix Bit(或其他 K210 設(shè)備)。或者,您可以將 .kmodel 刻錄到設(shè)備的閃存中。我的示例腳本從閃存讀取 .kmodel。如果您使用的是 SD 卡,請(qǐng)更改此行
task = kpu.load(0x200000)
至
task = kpu.load("/sd/model.kmodel")
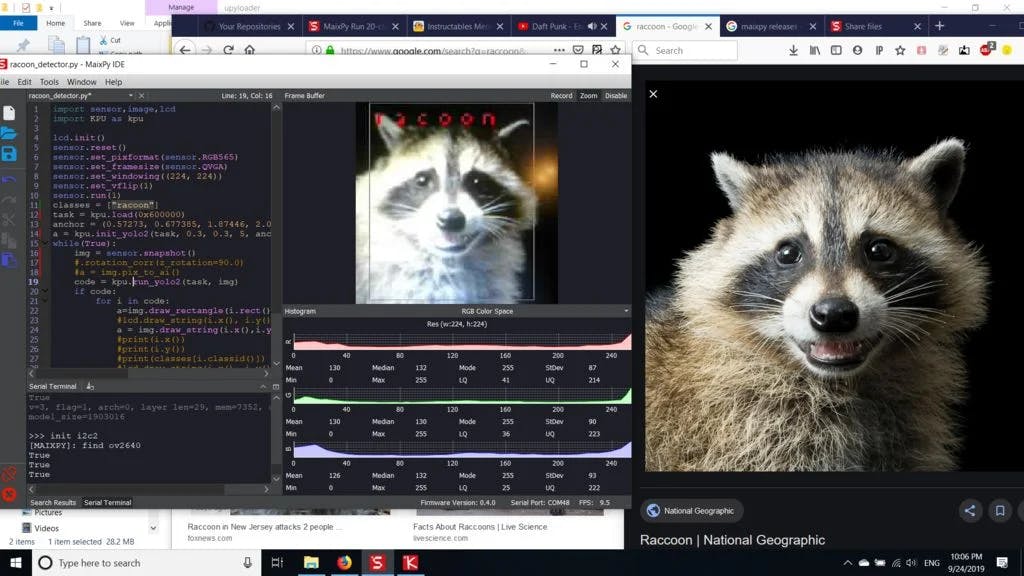
打開 MaixPy IDE 并按下連接按鈕。從 example_scripts/k210/detector 文件夾打開 raccoon_detector.py 腳本,然后按開始按鈕。您應(yīng)該會(huì)看到來自攝像機(jī)的實(shí)時(shí)流,周圍有邊界框……好吧,浣熊。您可以通過提供更多訓(xùn)練示例來提高模型的準(zhǔn)確性,但請(qǐng)記住,它是精靈小模型(1.9 M),并且在檢測(cè)小物體時(shí)會(huì)遇到麻煩(由于分辨率低)。
我在上一篇關(guān)于圖像識(shí)別的文章的評(píng)論中收到的一個(gè)問題是如何通過 UART/I2C 將檢測(cè)結(jié)果發(fā)送到連接到 Sipeed 開發(fā)板的其他設(shè)備。在我的 github 存儲(chǔ)庫中,您將能夠找到另一個(gè)示例腳本 raccoon_detector_uart.py,它(您猜對(duì)了)檢測(cè)浣熊并通過 UART 發(fā)送邊界框的坐標(biāo)。請(qǐng)記住,用于 UART 通信的引腳因不同的板而異,您需要在文檔中自行檢查。
第 6 步:總結(jié)
Kendryte K210 是用于計(jì)算機(jī)視覺的堅(jiān)固芯片,靈活,但可用內(nèi)存有限。到目前為止,在我的教程中,我們已經(jīng)介紹了使用它來識(shí)別自定義對(duì)象、檢測(cè)自定義對(duì)象和運(yùn)行一些基于 OpenMV 的計(jì)算機(jī)視覺任務(wù)。我知道它也適用于人臉識(shí)別,并且經(jīng)過一些修改,應(yīng)該可以進(jìn)行姿勢(shì)檢測(cè)和圖像分割(例如用于單目深度估計(jì))。隨意 fork 我的 GitHub 存儲(chǔ)庫并自己做一些很棒的事情!
以下是我在編寫本教程時(shí)使用的一些文章,如果您想了解有關(guān)使用神經(jīng)網(wǎng)絡(luò)進(jìn)行對(duì)象檢測(cè)的更多信息,請(qǐng)查看:
關(guān)于 YOLO 對(duì)象本地化如何與 Keras 配合使用的溫和指南(第 2 部分)
使用 YOLO、YOLOv2 和現(xiàn)在的 YOLOv3 進(jìn)行實(shí)時(shí)對(duì)象檢測(cè)
希望您可以利用您現(xiàn)在擁有的知識(shí)來構(gòu)建一些帶有機(jī)器視覺的很棒的項(xiàng)目!你可以在這里購買 Sipeed 板,它們是嵌入式系統(tǒng)上機(jī)器學(xué)習(xí)最便宜的選擇之一。
如果您有任何問題,請(qǐng)?jiān)贚inkedIn上添加我,并訂閱我的 YouTube 頻道,以獲得有關(guān)機(jī)器學(xué)習(xí)和機(jī)器人技術(shù)的更多有趣項(xiàng)目的通知。
- 使用K210和Arduino IDE/Micropython進(jìn)行圖像識(shí)別
- K210命令行開發(fā)環(huán)境搭建指南 5次下載
- K210中斷按鍵,自復(fù)位按鍵的兩種狀態(tài)
- K210學(xué)習(xí)記錄(1)——GPIO與軟件使用
- 基于K210的MNIST手寫數(shù)字識(shí)別
- K210應(yīng)用5-使用查詢方式通過UART接收數(shù)據(jù)
- 【堪智K210】 下載程序的過程原理 探索
- 亞博智能K210開發(fā)板學(xué)習(xí)筆記
- K210應(yīng)用4-使用中斷方式檢測(cè)按鍵
- K210應(yīng)用4-使用查詢方式檢測(cè)按鍵
- Maix Bit(K210) 裸機(jī)開發(fā)教程(八)實(shí)現(xiàn)簡(jiǎn)易照相機(jī)
- maixpy k210 GPIO操作
- Maix Bit K210點(diǎn)燈【保姆級(jí)教程】
- k210單片機(jī)初學(xué)
- Kendryte K210開發(fā)板使用說明書 64次下載
- OpenCV4.8 C++實(shí)現(xiàn)YOLOv8 OBB旋轉(zhuǎn)對(duì)象檢測(cè) 1778次閱讀
- 對(duì)象檢測(cè)邊界框損失函數(shù)–從IOU到ProbIOU介紹 3001次閱讀
- YOLOv8實(shí)現(xiàn)旋轉(zhuǎn)對(duì)象檢測(cè) 1933次閱讀
- 詳解對(duì)象檢測(cè)網(wǎng)絡(luò)性能評(píng)價(jià)指標(biāo)mAP計(jì)算 553次閱讀
- 利用opencv+openpose實(shí)現(xiàn)人體姿態(tài)檢測(cè) 3057次閱讀
- 如何進(jìn)行圖像邊緣的檢測(cè) 1285次閱讀
- 通過Opencv+Openpose實(shí)現(xiàn)體姿態(tài)檢測(cè) 1162次閱讀
- 如何在LiDAR點(diǎn)云上進(jìn)行3D對(duì)象檢測(cè) 2211次閱讀
- 三星TQ210v4開發(fā)板配置和核心板參數(shù) 3581次閱讀
- 天嵌科技TQ210v3開發(fā)板不含模塊-三星系列介紹 2615次閱讀
- 友善之臂Tiny210核心板介紹 8084次閱讀
- 友善之臂Smart210核心板介紹 1w次閱讀
- 友善之臂Mini210s開發(fā)板介紹 5892次閱讀
- 天嵌科技TQ210CoreB核心板-三星系列規(guī)格 2274次閱讀
- 關(guān)于三星系列TQ210v4開發(fā)板套裝的相關(guān)信息 2829次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論