 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
引言
移動機(jī)器人的安全避障問題一直是該項(xiàng)研究的基本問題,目前解決此問題的基本方法是采用多路超聲波傳感器通過適當(dāng)?shù)陌惭b角度達(dá)到獲取多路測量信息的目的。對于多路超聲波傳感器的擴(kuò)展,一般是在機(jī)器人系統(tǒng)控制核心之上進(jìn)行。這樣做的缺點(diǎn)在于,超聲波傳感器的擴(kuò)展占用了大量的系統(tǒng)硬件資源,另外大量的測量信息的處理也浪費(fèi)了系統(tǒng)軟件資源。針對這一問題,筆者采用CAN總線擴(kuò)展多路超聲波傳感器的作法。這種作法有幾個優(yōu)點(diǎn): 首先,CAN總線具有良好的傳輸防錯設(shè)計,保證了數(shù)據(jù)通信的可靠性;其次,多路超聲波傳感器的設(shè)計可由CAN總線智能節(jié)點(diǎn)實(shí)現(xiàn),大大節(jié)省了系統(tǒng)硬件資源和軟件資源;第三,由于CAN總線對于網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)數(shù)在理論上不受限制,所以隨著對移動機(jī)器人研究的不斷深入,對于整個機(jī)器人系統(tǒng)的總體設(shè)計可以靈活地在CAN總線上進(jìn)一步開發(fā)。本文介紹的CAN總線智能節(jié)點(diǎn)的設(shè)計以Philips公司的P87C591作為超聲波傳感器的控制核心。由于P87C591具有片上自帶的CAN控制器并且為CAN的應(yīng)用提供了許多專用的硬件功能,因此又將它作為了系統(tǒng)的CAN總線控制器,大大節(jié)省了主控系統(tǒng)的資源。CAN總線的收發(fā)器采用TJA1040。系統(tǒng)總體結(jié)構(gòu)框圖如圖1所示。
機(jī)器人系統(tǒng)控制核心由ARM實(shí)現(xiàn)。其主要功能是處理需要復(fù)雜計算的信息,將經(jīng)過處理的信息再送回CAN總線,并對整個網(wǎng)絡(luò)進(jìn)行管理。超聲波智能節(jié)點(diǎn)控制系統(tǒng)的主要功能就是判斷障礙物位置,將對移動機(jī)器人前進(jìn)方向有阻礙的障礙物信息通過CAN總線傳回主控系統(tǒng),由主控系統(tǒng)作出相應(yīng)處理并進(jìn)行避障動作。本文將著重介紹超聲波智能節(jié)點(diǎn)控制系統(tǒng)。
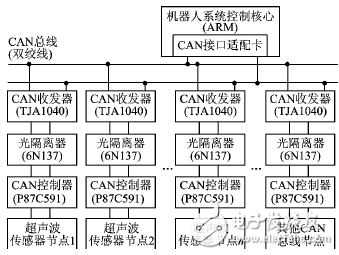
圖1 系統(tǒng)總體結(jié)構(gòu)框圖
1 超聲波智能節(jié)點(diǎn)控制系統(tǒng)的硬件設(shè)計
超聲波智能節(jié)點(diǎn)控制系統(tǒng)的硬件電路如圖2所示。P87C591是51系列單片機(jī),對于大部分熟悉51單片機(jī)的使用者來說它的使用方法十分簡單。下面分別介紹各個組成部分。
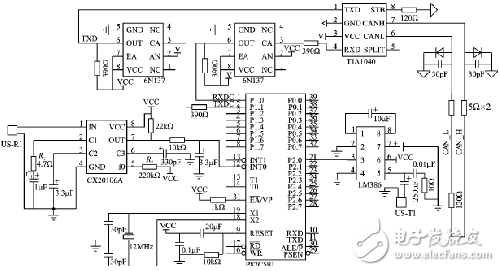
圖2 超聲波智能節(jié)點(diǎn)控制系統(tǒng)
1.1 控制部分
超聲波傳感器的控制部分采用Philips半導(dǎo)體公司生產(chǎn)的P87C591。它是一個單片8位高性能微控制器,具有片內(nèi)CAN控制器,是從80C51微控制器家族派生出來的。它采用了強(qiáng)大的80C51指令集,并成功地包括了Philips半導(dǎo)體公司SJA1000 CAN控制器的PeliCAN功能;全靜態(tài)內(nèi)核提供了擴(kuò)展的節(jié)電方式;振蕩器可停止和恢復(fù)而不會丟失數(shù)據(jù);改進(jìn)的1∶1內(nèi)部時鐘預(yù)分頻器在12 MHz外部時鐘速率時,實(shí)現(xiàn)500 ns指令周期;內(nèi)部具有的16 KB內(nèi)部程序存儲器完全滿足本系統(tǒng)要求。
移動機(jī)器人的安全避障問題一直是該項(xiàng)研究的基本問題,目前解決此問題的基本方法是采用多路超聲波傳感器通過適當(dāng)?shù)陌惭b角度達(dá)到獲取多路測量信息的目的。對于多路超聲波傳感器的擴(kuò)展,一般是在機(jī)器人系統(tǒng)控制核心之上進(jìn)行。這樣做的缺點(diǎn)在于,超聲波傳感器的擴(kuò)展占用了大量的系統(tǒng)硬件資源,另外大量的測量信息的處理也浪費(fèi)了系統(tǒng)軟件資源。針對這一問題,筆者采用CAN總線擴(kuò)展多路超聲波傳感器的作法。這種作法有幾個優(yōu)點(diǎn): 首先,CAN總線具有良好的傳輸防錯設(shè)計,保證了數(shù)據(jù)通信的可靠性;其次,多路超聲波傳感器的設(shè)計可由CAN總線智能節(jié)點(diǎn)實(shí)現(xiàn),大大節(jié)省了系統(tǒng)硬件資源和軟件資源;第三,由于CAN總線對于網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)數(shù)在理論上不受限制,所以隨著對移動機(jī)器人研究的不斷深入,對于整個機(jī)器人系統(tǒng)的總體設(shè)計可以靈活地在CAN總線上進(jìn)一步開發(fā)。本文介紹的CAN總線智能節(jié)點(diǎn)的設(shè)計以Philips公司的P87C591作為超聲波傳感器的控制核心。由于P87C591具有片上自帶的CAN控制器并且為CAN的應(yīng)用提供了許多專用的硬件功能,因此又將它作為了系統(tǒng)的CAN總線控制器,大大節(jié)省了主控系統(tǒng)的資源。CAN總線的收發(fā)器采用TJA1040。系統(tǒng)總體結(jié)構(gòu)框圖如圖1所示。
機(jī)器人系統(tǒng)控制核心由ARM實(shí)現(xiàn)。其主要功能是處理需要復(fù)雜計算的信息,將經(jīng)過處理的信息再送回CAN總線,并對整個網(wǎng)絡(luò)進(jìn)行管理。超聲波智能節(jié)點(diǎn)控制系統(tǒng)的主要功能就是判斷障礙物位置,將對移動機(jī)器人前進(jìn)方向有阻礙的障礙物信息通過CAN總線傳回主控系統(tǒng),由主控系統(tǒng)作出相應(yīng)處理并進(jìn)行避障動作。本文將著重介紹超聲波智能節(jié)點(diǎn)控制系統(tǒng)。
圖1 系統(tǒng)總體結(jié)構(gòu)框圖
1 超聲波智能節(jié)點(diǎn)控制系統(tǒng)的硬件設(shè)計
超聲波智能節(jié)點(diǎn)控制系統(tǒng)的硬件電路如圖2所示。P87C591是51系列單片機(jī),對于大部分熟悉51單片機(jī)的使用者來說它的使用方法十分簡單。下面分別介紹各個組成部分。
圖2 超聲波智能節(jié)點(diǎn)控制系統(tǒng)
1.1 控制部分
超聲波傳感器的控制部分采用Philips半導(dǎo)體公司生產(chǎn)的P87C591。它是一個單片8位高性能微控制器,具有片內(nèi)CAN控制器,是從80C51微控制器家族派生出來的。它采用了強(qiáng)大的80C51指令集,并成功地包括了Philips半導(dǎo)體公司SJA1000 CAN控制器的PeliCAN功能;全靜態(tài)內(nèi)核提供了擴(kuò)展的節(jié)電方式;振蕩器可停止和恢復(fù)而不會丟失數(shù)據(jù);改進(jìn)的1∶1內(nèi)部時鐘預(yù)分頻器在12 MHz外部時鐘速率時,實(shí)現(xiàn)500 ns指令周期;內(nèi)部具有的16 KB內(nèi)部程序存儲器完全滿足本系統(tǒng)要求。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于CAN總線的高性能倒車?yán)走_(dá)設(shè)計 17次下載
- 汽車驅(qū)動系統(tǒng)的CAN總線設(shè)計 44次下載
- 淺談CAN總線系統(tǒng) 33次下載
- 基于P87C591的CAN總線超聲測距系統(tǒng)解析 0次下載
- 基于87C196NT單片機(jī)實(shí)現(xiàn)CAN總線通信 4次下載
- 三相電源過零信號檢測及相序自適應(yīng)的研究與實(shí)現(xiàn)
- 基于P87C591的信號采集節(jié)點(diǎn)的設(shè)計
- C P LD和單片機(jī)的高精度超聲測距系統(tǒng)
- 基于P87C591的CAN總線超聲測距系統(tǒng)設(shè)計
- 基于CAN總線技術(shù)的果園氣象監(jiān)測網(wǎng)絡(luò)節(jié)點(diǎn)的設(shè)計及實(shí)現(xiàn)
- 一種開放式發(fā)酵過程自動控制系統(tǒng)的實(shí)現(xiàn)
- 基于CAN總線的監(jiān)控系統(tǒng)設(shè)計
- 用87C196NT單片機(jī)實(shí)現(xiàn)CAN總線通信
- P87C591內(nèi)嵌CAN控制器的應(yīng)用設(shè)計
- 基于P87C591的CAN總線系統(tǒng)智能節(jié)點(diǎn)設(shè)計
- 【技術(shù)分享】CAN總線相關(guān)知識探討以及Model3C兩路CAN的應(yīng)用 611次閱讀
- can總線隔離模塊的作用 1689次閱讀
- 汽車CAN總線系統(tǒng)的挑戰(zhàn)與設(shè)計 1197次閱讀
- 超聲波測距儀/聲納測距系統(tǒng)的電路分享 2747次閱讀
- 基于CY8C24894 PSoC的超聲波測距系統(tǒng)解決方案 3378次閱讀
- 基于P87C591單片機(jī)和P87C591數(shù)模轉(zhuǎn)換器實(shí)現(xiàn)機(jī)車通風(fēng)機(jī)控制系統(tǒng)設(shè)計 1540次閱讀
- 基于P87C591控制器和速度預(yù)測模型實(shí)現(xiàn)機(jī)車節(jié)能運(yùn)行控制系統(tǒng)的設(shè)計 1294次閱讀
- 采用AT89C51微處理器和olaroid 600系列傳感器實(shí)現(xiàn)超聲波測距系統(tǒng)設(shè)計 1357次閱讀
- 基于CAN控制器P8xC591和傳感器實(shí)現(xiàn)車窗智能控制系統(tǒng)的設(shè)計 2709次閱讀
- STM32單片機(jī)的高精度超聲波測距系統(tǒng)設(shè)計 8516次閱讀
- CAN總線協(xié)議是什么?CAN總線協(xié)議有哪些?CAN總線協(xié)議知識分析 7.4w次閱讀
- 簡單的超聲波測距模塊制作_HC-SR04超聲波測距模塊及制作圖詳解 5.3w次閱讀
- CAN總線概述及應(yīng)用_CAN總線的應(yīng)用案例(汽車CAN總線應(yīng)用) 3.4w次閱讀
- 超聲波測距系統(tǒng)設(shè)計理論分析及工作原理 9319次閱讀
- 基于S3C2410的CAN總線通信設(shè)計與開發(fā) 2798次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1EN60335-1安規(guī)標(biāo)準(zhǔn) 中文版本
- 1.86 MB | 53次下載 | 1 積分
- 2TDA7850音頻功率放大器英文手冊
- 0.39 MB | 1次下載 | 免費(fèi)
- 3VCC啟動電路(可下載)
- 748.32 KB | 1次下載 | 免費(fèi)
- 460KW電機(jī)控制器硬件驅(qū)動電路設(shè)計(可下載)
- 720.01 KB | 1次下載 | 免費(fèi)
- 5LTD1534RFN N溝道增強(qiáng)型功率MOSFET規(guī)格書
- 1.11 MB | 次下載 | 免費(fèi)
- 6LT1702SI P溝道增強(qiáng)型功率MOSFET規(guī)格書
- 1.04 MB | 次下載 | 免費(fèi)
- 7LT1713SI N溝道增強(qiáng)型功率MOSFET規(guī)格書
- 0.85 MB | 次下載 | 免費(fèi)
- 8反電動勢到底如何來理解?(可下載)
- 1.63 MB | 次下載 | 免費(fèi)
本月
- 1STM32CubeMX用于STM32配置和初始化C代碼生成
- 21.90 MB | 626次下載 | 免費(fèi)
- 2STM32開發(fā)板教程之STM32開發(fā)指南免費(fèi)下載
- 24.88 MB | 176次下載 | 3 積分
- 3EN60335-1安規(guī)標(biāo)準(zhǔn) 中文版本
- 1.86 MB | 53次下載 | 1 積分
- 4OAH0428最新規(guī)格書(中文)
- 2.52 MB | 28次下載 | 10 積分
- 5Altium-常用3D封裝庫(Step)接插件篇
- 4.95 MB | 26次下載 | 免費(fèi)
- 6UHV系列雷電沖擊電壓發(fā)生器試驗(yàn)裝置詳細(xì)說明使用
- 1.07 MB | 17次下載 | 免費(fèi)
- 7介紹一些常用的電子元器件
- 3.20 MB | 8次下載 | 免費(fèi)
- 8麻將機(jī)升降電路
- 0.12 MB | 6次下載 | 1 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935124次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420063次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191371次下載 | 10 積分
- 5十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183336次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81583次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論