完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > pid
PID=port ID,在STP(生成樹協(xié)議)中,若在端口收到的BPDU中BID和path cost相同時,則比較PID來選擇阻塞端口。數(shù)字電視復用系統(tǒng)名詞 PID(Packet Identifier) 在數(shù)字電視復用系統(tǒng)中它的作用好比一份文件的文件名,我們可以稱它為“標志碼傳輸包” 。
文章:611個 瀏覽:87528次 帖子:796個
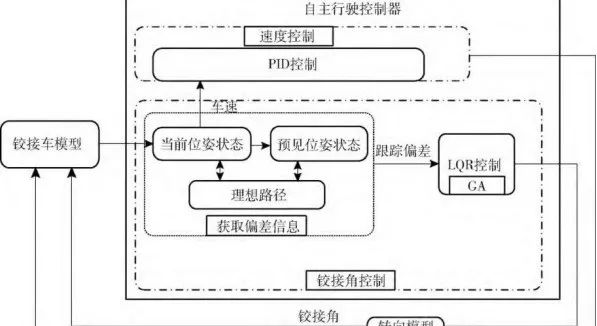
PID控制 PID控制又稱比例-積分-微分控制器。在自動駕駛汽車跟蹤控制中,該算法主要是對車輛反饋的車輛位姿等信息做偏差處理,并通過比例、積分、微分進行...

無人飛行器自主飛行技術多年來一直是航空領域研究的熱點,并且在實際應用中存在大量的需求,主要優(yōu)點包括:系統(tǒng)制造成本低,在執(zhí)行任務時人員傷害小,具有優(yōu)良的操...
采用狀態(tài)反饋和PID控制方案對汽溫控制進行仿真研究
鍋爐過熱器和再熱器出口蒸汽溫度是單元機組運行中必須保持在一定范圍的重要參數(shù)。隨著機組容量的增大,過熱器和再熱器管道也隨之加長,這就使得其熱慣性和調(diào)節(jié)滯后...
PID控制簡介及調(diào)節(jié)經(jīng)驗方法
開環(huán)控制系統(tǒng)是指被控對象的輸出(被控制量)對控制器的輸出沒有影響。在這種控制系統(tǒng)中,不依賴將被控量反送回來以形成任何閉環(huán)回路。
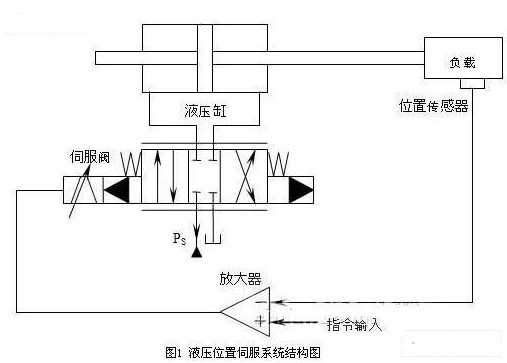
采用模糊控制與PID控制結合提高液壓位置伺服系統(tǒng)的控制精度
模糊控制不需要被控對象的精確數(shù)學模型,并且可以引入專家經(jīng)驗,因此有較好的實用性。但單獨使用模糊控制不易消除穩(wěn)態(tài)誤差,且對控制器運算性能要求較高,而PID...
匯川伺服電機抖動問題是一個常見的問題,它可能是由多種原因引起的。在解決這個問題時,我們需要對伺服電機的參數(shù)進行調(diào)整。 一、伺服電機抖動的原因 在調(diào)整參數(shù)...
在工程實際中,應用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。PID控制器問世至今已有近70年歷史,它以其結構簡單、...
本次設計的兩輪自平衡自動車采用AVR Atmega16芯片來采集陀螺儀和加速器的信號,采用LCD1602顯示轉彎角度傳感器測量的動態(tài)角度和角速度。##為...
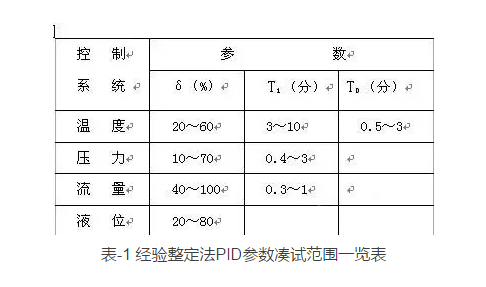
這是一首用經(jīng)驗法進行PID參數(shù)工程整定的口訣,該口訣流傳至今已有幾十年了,其最早出現(xiàn)在1973年11月出版的《化工自動化》一書中。現(xiàn)在網(wǎng)上流傳的口訣,看...
增量式PID算法的STM32實現(xiàn) 分析比例、積分、微分三個環(huán)節(jié)
雖然PID不是什么牛逼的東西,但是真心希望以后剛剛接觸這塊的人能盡快進入狀態(tài)。特地分享一些自己如何實現(xiàn)的過程。 首先說說增量式PID的公式,這個關系到M...
你可以使用ps命令。它能顯示當前運行中進程的相關信息,包括進程的PID。Linux和UNIX都支持ps命令,顯示所有運行中進程的相關信息。ps命令能...
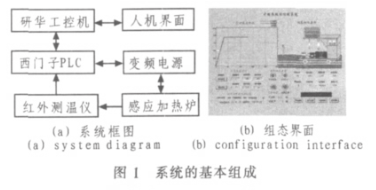
基于S7-200 PLC器件和PID控制算法實現(xiàn)無超調(diào)PID溫控系統(tǒng)的設計
系統(tǒng)設備的基本組成如圖l(a)所示,具體控制過程為:在工控機組態(tài)軟件的支持下,通過人機界面的交互輸入或修改預定的工件加熱溫升曲線,系統(tǒng)的人機界面如圖l(...
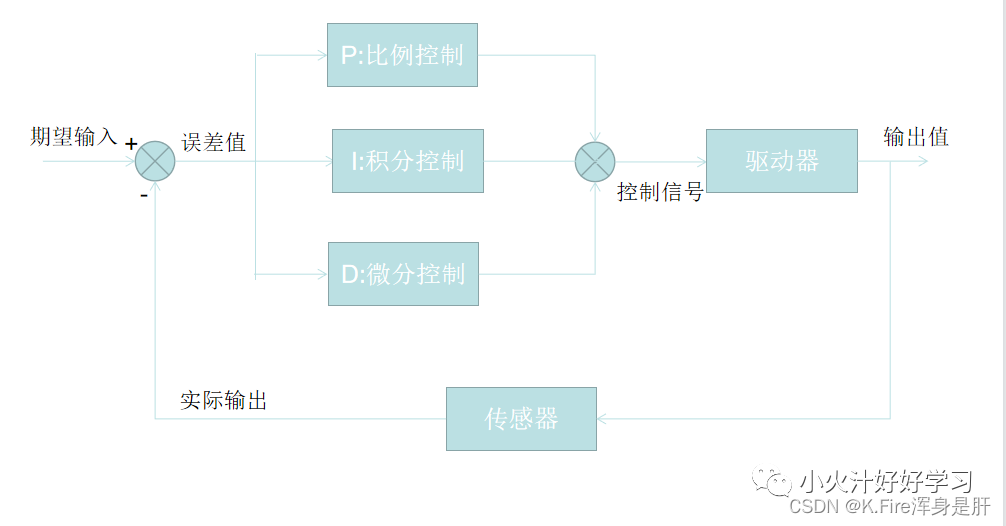
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。算法是不可以吃的。PI...

采用神經(jīng)網(wǎng)絡控制和PID控制算法相結合優(yōu)化多電機同步控制系統(tǒng)性能
在造紙、印染、紡織等高精度、高轉速傳動系統(tǒng)中,隨著工業(yè)自動化程度的提高和生產(chǎn)規(guī)模的擴大,采用單電機驅動往往難以滿足生產(chǎn)的要求。而多電機同步控制歷來是最核...
2019-10-09 標簽:控制系統(tǒng)神經(jīng)網(wǎng)絡pid 6488 0
變頻器的設定參數(shù)較多,每個參數(shù)均有一定的選擇范圍,使用中常常遇到因個別參數(shù)設置不當,導致變頻器不能正常工作的現(xiàn)象。因此,變頻器調(diào)試是從正確設置變頻器參數(shù)...

仿真中模糊自整定控制器中KP,KI,KD三個待整定參數(shù)的初始值均為零。為使輸入信號與模糊自整定控制器的論域相同,引入了幅度為3的限幅器。當給定轉速均設定...
2020-04-06 標簽:控制器控制系統(tǒng)pid 6379 0
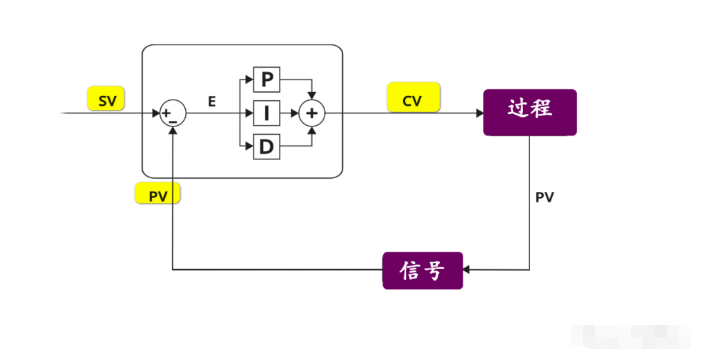
用最簡單的術語來說,控制器計算 P、I 和 D 動作,并將每個參數(shù)乘以誤差或 E,它等于直接作用中的 SP-PV,如前所述。然后,將所有參數(shù)計算加起來以...
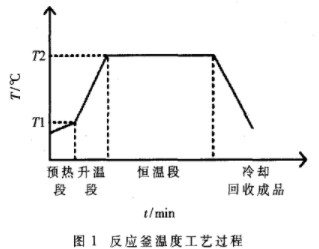
采用基于BP神經(jīng)網(wǎng)絡的PID控制方法實現(xiàn)反應釜溫度控制系統(tǒng)的設計
常規(guī)PID控制算法對于大部分工業(yè)過程的被控對象控制效果良好,但是對于反應釜溫度的時間滯后問題,PID控制算法在控制溫度跟蹤變化曲線時存在振蕩和精度低的缺...
2019-06-18 標簽:控制系統(tǒng)神經(jīng)網(wǎng)絡pid 6344 0
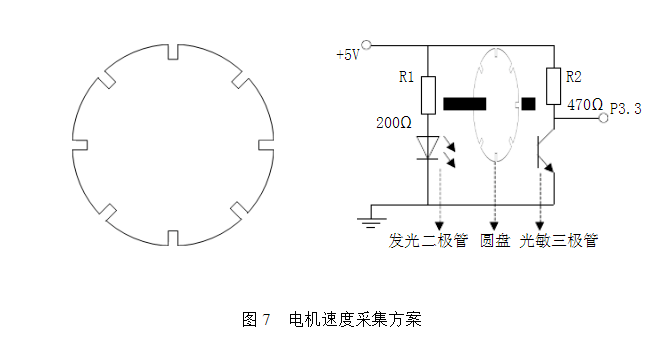
STM32F103C8T6實現(xiàn)直流電機速度PID控制
前面完成了基于STM32F103C8T6+L298N+MG513P30直流電機的PWM控制和兩種方法的編碼器實時速度反饋,拿到這個反饋值后我們就可以使用...

PID控制,在實際中分為PI和PD控制,PID控制器就是根據(jù)系統(tǒng)的誤差,利用比例、積分、微分計算出控制量進行控制的。
 換一批
換一批
編輯推薦廠商產(chǎn)品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術 | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1