目前主流的CAN協(xié)議控制器一般采用I/O總線(SJA1000等)或SPI接口(MCP2515等)與MCU進(jìn)行通信。
2014-09-26 16:27:56 4751
4751 
在CAN網(wǎng)絡(luò)中,所有節(jié)點(diǎn)的數(shù)據(jù)收發(fā)共享一條總線。當(dāng)面對(duì)未知的多節(jié)點(diǎn)CAN總線網(wǎng)絡(luò)時(shí),如何準(zhǔn)確分析各節(jié)點(diǎn)間的通信協(xié)議呢?
2018-02-27 09:29:2715233 
很難找到一篇能夠適合初學(xué)者CAN總線原理的文章,因此小編本著通俗易懂的原則編寫此文!
2018-10-16 08:48:1235609 CAN 總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN 為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的 J1939 協(xié)議。近年來(lái),它具有的高可靠性和良好的錯(cuò)誤檢測(cè)能力受到重視,被廣泛應(yīng)用于汽車計(jì)算機(jī)控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強(qiáng)及振動(dòng)大的工業(yè)環(huán)境。
2022-08-02 12:29:541592 本文說(shuō)的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽(tīng)見(jiàn)CAN總線,也常聽(tīng)見(jiàn)CAN協(xié)議。
2022-09-15 12:47:162600 CAN(Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,以此取代昂貴而笨重的配電線束。
2022-09-22 09:28:015861 假期更新了一文搞懂CAN總線協(xié)議幀格式,CAN FD總線協(xié)議怎能錯(cuò)過(guò)?本篇博文將講解CAN FD總線協(xié)議幀格式。
2022-10-14 12:49:532680 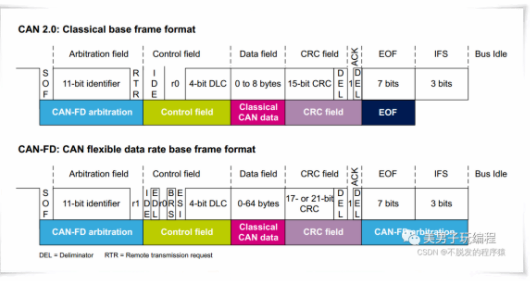
CAN總線:CAN 是Controller Area Network 的縮寫(以下稱為 CAN),是 ISO1 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。
2023-08-14 14:58:59961 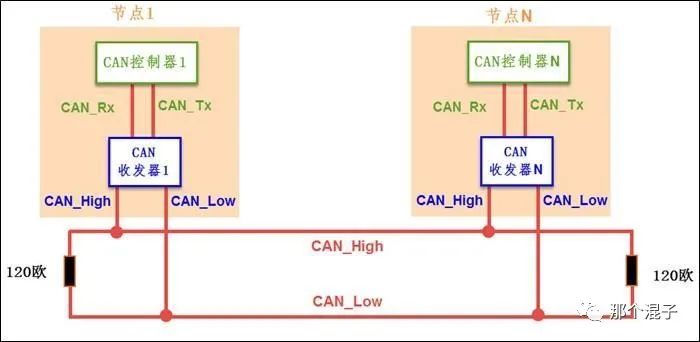
最終成為國(guó)際標(biāo)準(zhǔn)(ISO11519以及ISO11898),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。差異點(diǎn)如下:CAN 總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN 為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的 J1939 協(xié)議。近年來(lái),它具有的高可靠性和良好的錯(cuò)誤檢測(cè)
2021-08-12 07:27:52
NI的CAN卡如何獲取CAN總線負(fù)載率?不是在max里的那個(gè)。
2020-04-16 16:55:51
),CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重情況下具有自動(dòng)關(guān)閉輸出功能。3,CAN總線協(xié)議基本規(guī)則:(1),總線訪問(wèn):采用載波監(jiān)聽(tīng)多路訪問(wèn),CAN控制器之恩能夠在總線空閑時(shí),就是節(jié)點(diǎn)偵聽(tīng)到網(wǎng)絡(luò)上至少存在3個(gè)空閑位(隱性位
2014-04-27 15:16:02
),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線bxCAN簡(jiǎn)介bxCAN...
2021-08-20 06:27:07
請(qǐng)大家?guī)兔?解釋一下CAN總線協(xié)議 濾波器理解問(wèn)題
2013-12-15 13:00:40
`CAN總線接口協(xié)議分析通過(guò)OSC482L進(jìn)行CAN總線接口的分析,儀器可選多種測(cè)量方式,可以支持單線或雙線方式測(cè)量。單線測(cè)試測(cè)量可以支持自動(dòng),CAN_H對(duì)地,CAN_L對(duì)地三種方式,雙線差分方式
2020-08-19 09:27:19
在了解 CAN 總線協(xié)議以前,需要介紹有關(guān)協(xié)議中的基本概念。1.報(bào)文(Messages)在 CAN 總線傳輸?shù)臄?shù)據(jù)具有固定的格式和有限的長(zhǎng)度,稱為報(bào)文。2.發(fā)送器(Transmitter)和接收器
2018-12-14 14:37:44
),CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重情況下具有自動(dòng)關(guān)閉輸出功能。3,CAN總線協(xié)議基本規(guī)則:(1),總線訪問(wèn):采用載波監(jiān)聽(tīng)多路訪問(wèn),CAN控制器之恩能夠在總線空閑時(shí),就是節(jié)點(diǎn)偵聽(tīng)到網(wǎng)絡(luò)上至少存在3個(gè)空閑位(隱性位
2014-04-18 16:36:30
CAN總線協(xié)議的打包與解包是如何進(jìn)行的?CAN總線協(xié)議是如何自動(dòng)生成代碼的?
2021-11-22 07:57:35
采用載波監(jiān)聽(tīng)多路訪問(wèn)、逐位仲裁的非破壞性總線仲裁技術(shù)。直接通信距離最遠(yuǎn)10km,速率5Kb/s通信速率最高可達(dá)1Mb/s,距離40m末端要有120歐終端電阻11898協(xié)議iso的osi模型11898-1對(duì)應(yīng)controller11898-2對(duì)應(yīng)高速can收發(fā)器11898-3對(duì)應(yīng)低速
2022-03-01 06:29:30
電子通信協(xié)議之CAN總線協(xié)議篇
2020-12-28 06:30:02
在開發(fā)人員進(jìn)行CAN總線相關(guān)裝置進(jìn)行調(diào)試測(cè)試時(shí),通常會(huì)采用CAN卡連接CAN網(wǎng)絡(luò)和PC電腦進(jìn)行數(shù)據(jù)的采集、觀察和記錄。目前國(guó)內(nèi)外有一些列配套的在線分析工具和軟件,但是價(jià)格昂貴。但長(zhǎng)期以來(lái),人們對(duì)采集
2020-01-05 11:22:13
現(xiàn)場(chǎng)總線VS工業(yè)以太網(wǎng)現(xiàn)場(chǎng)總線CAN總線(Control Area Network)一、CAN總線是什么?CAN總線的作用?CAN總線的優(yōu)點(diǎn)CAN總線拓?fù)鋱D各接口協(xié)議速率對(duì)比
2021-08-06 07:44:19
應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。CAN總線的特點(diǎn)(1)多主機(jī)方式工作:網(wǎng)絡(luò)上任意節(jié)點(diǎn)可在任意時(shí)刻其他節(jié)點(diǎn)發(fā)送數(shù)據(jù),通信方式靈活;(2)網(wǎng)絡(luò)上...
2022-01-13 07:52:18
一、大致框架CAN總線的系統(tǒng)架構(gòu),CAN總線上掛在相應(yīng)的設(shè)備節(jié)點(diǎn)。這些設(shè)備節(jié)點(diǎn)包含:最底層也就是物理層的CAN收發(fā)器(和本次使用CAN收發(fā)器有所區(qū)別,僅供參考)。信息協(xié)議層也就是CAN控制器(和本次
2021-08-19 06:47:56
必須是相同的。? 傳輸層描述了 CAN 總線協(xié)議的內(nèi)核,它負(fù)責(zé)位時(shí)序(bit timing)、同步、仲裁、應(yīng)答、錯(cuò)誤探測(cè)等。? 對(duì)象層負(fù)責(zé)報(bào)文的過(guò)濾、狀態(tài)和控制。? 應(yīng)用層完成用戶指定的數(shù)據(jù)傳輸任務(wù)。CAN 總線的物理層為數(shù)據(jù)通信提供了物理連接,而實(shí)際的數(shù)據(jù)通信在其他 3 層中完成。
2018-12-14 14:17:02
文中在分析CAN總線通信控制協(xié)議的基礎(chǔ)上,在MATLAB/Sinulink軟件Stateflow仿真環(huán)境下,利用有限狀態(tài)機(jī)理論對(duì)CAN總線通信系統(tǒng)進(jìn)行了形式化建模。通過(guò)此仿真模型,分析了CAN總線
2021-05-21 07:00:08
0.CAN總線錯(cuò)誤分析與解決–講的最精辟的放在最前面我們知道CAN總線上的每個(gè)節(jié)點(diǎn)往總線上發(fā)送數(shù)據(jù)的同時(shí)會(huì)同時(shí)讀取總線上的數(shù)據(jù),并與自己發(fā)送的數(shù)據(jù)作對(duì)比。—CAN仲裁???CAN總線錯(cuò)誤分別有發(fā)送
2022-01-14 06:55:10
Can總線協(xié)議參考
2013-04-10 23:21:40
上周學(xué)習(xí)了Modbus協(xié)議的內(nèi)容,后面幾周晚上學(xué)習(xí)下Can總線。這幾天晚上一直在看CanOpen協(xié)議源碼,現(xiàn)在開始整理筆記,雖然網(wǎng)上有很多大牛寫過(guò),我還是自己記錄下,這樣印象才深刻。文章目
2021-08-23 08:44:20
,則需要專業(yè)的總線分析儀。CANScope 是集 CAN 節(jié)點(diǎn)測(cè)試與標(biāo)定、CAN 總線故障診斷與解決的綜合儀器。三、多路 CAN 卡的應(yīng)用以上提到的總線協(xié)議分析是在總線節(jié)點(diǎn)少、節(jié)點(diǎn) ID 已知的前提下
2022-08-10 11:33:54
月報(bào)最近學(xué)習(xí)了STM32的CAN總線協(xié)議,使用的是野火的開發(fā)板 CAN 是Controller Area Network 的縮寫(CAN BUS),具有布線簡(jiǎn)單、典型的總線型結(jié)構(gòu)、可最大限度的節(jié)約
2021-08-19 07:41:05
`武漢若比特機(jī)器人有限公司提供USB轉(zhuǎn)CAN轉(zhuǎn)換器、CAN切換器、CAN總線、CAN接口卡,廠家直接供貨,物美價(jià)廉,性價(jià)比高。聯(lián)系人:李工,電話***。USB-CAN接口適配器是CAN產(chǎn)品開發(fā)
2011-05-27 09:13:53
`CAN總線接口協(xié)議分析通過(guò)OSC482L進(jìn)行CAN總線接口的分析,儀器可選多種測(cè)量方式,可以支持單線或雙線方式測(cè)量。單線測(cè)試測(cè)量可以支持自動(dòng),CAN_H對(duì)地,CAN_L對(duì)地三種方式,雙線差分方式
2020-06-27 12:11:46
can總線本身有一個(gè)規(guī)范協(xié)議can 2.0b,那應(yīng)用層協(xié)議主要是規(guī)定哪些內(nèi)容的(我只知道有分配標(biāo)識(shí)符等),can總線通信的數(shù)據(jù)格式是不是也是在應(yīng)用層規(guī)定的?哪位高手能不能具體舉例講一下。------謝謝
2011-07-09 02:38:01
寶來(lái)車CAN總線的組成與結(jié)構(gòu)寶來(lái)車驅(qū)動(dòng)系統(tǒng)CAN總線寶來(lái)車CAN總線可靠性分析
2021-05-12 06:30:06
基于PCI總線的CAN卡該如何去設(shè)計(jì)?
2021-06-02 06:14:34
CAN總線信號(hào)、分析數(shù)據(jù)的時(shí)候是否想過(guò),這些信號(hào)在電控單元(ECU)中通訊協(xié)議是如何實(shí)現(xiàn)的。本次內(nèi)容介紹的是如何將CAN總線的通訊協(xié)議在C語(yǔ)言環(huán)境中實(shí)現(xiàn)。下面的內(nèi)容需要有一點(diǎn)點(diǎn)的C語(yǔ)言基礎(chǔ),...
2021-12-15 08:23:06
通過(guò)研究CAN2.0B協(xié)議規(guī)范,對(duì)報(bào)文格式的分析和標(biāo)識(shí)符的分配,設(shè)計(jì)出了基于CAN總線的智能建筑監(jiān)控系統(tǒng)的通信協(xié)議。
2021-06-02 06:48:03
針對(duì)J1939協(xié)議培訓(xùn)要求,構(gòu)建了一個(gè)基于J1939協(xié)議的汽車總線培訓(xùn)實(shí)驗(yàn)系統(tǒng)。系統(tǒng)硬件由計(jì)算機(jī)、Kvaser CAN總線分析儀以及基于J1939協(xié)議的汽車CAN總線模塊包括儀表板模塊、車身電器模
2009-08-06 10:25:11 50
50 為了優(yōu)化CAN 通訊協(xié)議的實(shí)時(shí)性,通常有兩類方法。第一類是在原有CAN 事件觸發(fā)協(xié)議的基礎(chǔ)上對(duì)總線仲裁方式做一些改進(jìn);第二類是采用時(shí)間觸發(fā)的TTCAN 協(xié)議。本文搭建了實(shí)驗(yàn)平臺(tái),
2009-08-07 08:34:1736 本文系統(tǒng)地研究了 CAN 總線與以太網(wǎng)互連的技術(shù)要點(diǎn),首先分析互連技術(shù)在實(shí)現(xiàn)過(guò)程中遇到的難點(diǎn)——協(xié)議轉(zhuǎn)換。然后提出了一種CAN 總線與以太網(wǎng)系統(tǒng)互連設(shè)計(jì)方案,并詳細(xì)闡
2009-08-12 09:07:1422 摘要 通過(guò)對(duì)RS485、CAN與FlexRay協(xié)議中有關(guān)抗干擾能力的指標(biāo)的比較與分析,說(shuō)明CAN總線在抗干擾設(shè)計(jì)上有獨(dú)到之處:在物理層上,總線信號(hào)的二值性以及發(fā)生競(jìng)爭(zhēng)時(shí)結(jié)
2009-03-29 15:05:101690 利用MCP2515的多路CAN總線接口及驅(qū)動(dòng)程序設(shè)計(jì)
結(jié)合實(shí)際需求,提出一種多路CAN總線接口的設(shè)計(jì)方法。系統(tǒng)硬件主體采用AT91RM9200和MCP2515,操作系統(tǒng)采用ARMLin
2009-03-29 15:11:305780 
CAN總線在機(jī)車監(jiān)控系統(tǒng)中的應(yīng)用
以Philips公司的SJA1000為例,介紹了CAN現(xiàn)場(chǎng)總線的特點(diǎn),控制器的功能、結(jié)構(gòu)和CAN2.0B總線協(xié)議的基本內(nèi)容,闡述了一
2009-05-04 22:36:281005 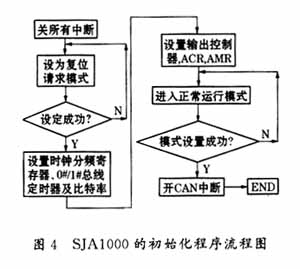
針對(duì)不同的目的和要求的基于CAN協(xié)議的較高層協(xié)議標(biāo)準(zhǔn)。下面就對(duì)CAN 協(xié)議及其較高層協(xié)議DeviceNet和CANopen進(jìn)行一些比較。
2011-05-09 10:26:002690 
該文根據(jù)CAN總線協(xié)議規(guī)范,結(jié)合溫室控制系統(tǒng)特點(diǎn)設(shè)計(jì)了一種實(shí)用可靠的CAN總線應(yīng)用層協(xié)議,該協(xié)議特別適合于溫室控制系統(tǒng)的使用。
2011-08-30 17:33:0145 本文介紹了CAN 總線的主要性能及特點(diǎn),CAN 總線在實(shí)際工業(yè)應(yīng)用中的總體結(jié)構(gòu),同時(shí)給出了CAN 總線協(xié)議轉(zhuǎn)換器的硬件設(shè)計(jì)方法和通信協(xié)議。主要研究了CAN 總線接口電路設(shè)計(jì),把所設(shè)計(jì)的
2011-10-31 15:01:47463 文中分析了CAN總線的發(fā)展和汽車CAN總線技術(shù)的特征,對(duì)CAN總線在汽車領(lǐng)域的應(yīng)用進(jìn)行了深入的探討。
2011-12-14 14:58:1084 本文分析了CAN 總線的一些特點(diǎn)以及在國(guó)內(nèi)的的應(yīng)用狀況,提出了引入國(guó)際上通用的CAN 總線高層應(yīng)用協(xié)議,以提高國(guó)內(nèi)CAN 系統(tǒng)應(yīng)用水平的建議,并簡(jiǎn)要介紹了一種CAN 的高層協(xié)議 CANopen 協(xié)
2012-03-27 15:37:57103 基于CAN總線系統(tǒng)結(jié)構(gòu)構(gòu)成,通過(guò)工程實(shí)踐的具體應(yīng)用以及對(duì)CAN控制器及收發(fā)器硬件結(jié)構(gòu)的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線通信的節(jié)點(diǎn)同步機(jī)制、總線地址機(jī)制、總
2012-05-08 15:23:04404 控制器局域網(wǎng)總線(CAN,Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議由德國(guó)的Robert Bos
2012-09-10 09:22:53197509 
以基于51單片機(jī)的CAN總線系統(tǒng)設(shè)計(jì)為講解對(duì)象,在內(nèi)容安排上兼顧理論與實(shí)踐,循序漸進(jìn)地將其呈現(xiàn)給讀者。第1—3章主要講述CAN總線底層協(xié)議規(guī)范、應(yīng)用層協(xié)議以及CAN總線控制器和驅(qū)動(dòng)器,為CAN總線
2016-04-05 11:17:2318 以基于51單片機(jī)的CAN總線系統(tǒng)設(shè)計(jì)為講解對(duì)象,在內(nèi)容安排上兼顧理論與實(shí)踐,循序漸進(jìn)地將其呈現(xiàn)給讀者。第1—3章主要講述CAN總線底層協(xié)議規(guī)范、應(yīng)用層協(xié)議以及CAN總線控制器和驅(qū)動(dòng)器,為CAN總線
2016-04-05 11:18:2021 基于STM32單片機(jī)的CAN總線分析儀的設(shè)計(jì)
2017-01-24 16:54:2441 基于雙CAN總線的數(shù)字伺服通信協(xié)議
2017-09-01 14:25:428 CAN總線通信協(xié)議的分析和實(shí)現(xiàn) CAN總線通信協(xié)議以及其實(shí)現(xiàn)方法
2017-09-04 08:45:3340 控制器局域網(wǎng)CAN(CAN一 ControllerAreaNetwork)為串行通訊協(xié)議,屬于現(xiàn)場(chǎng)總線的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò),能有效地支持具有很高安全等級(jí)的分布
2017-11-21 15:48:471 CAN總線是什么?CAN總線定義是什么? CAN(Controller Area Network)是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。廣泛應(yīng)用于汽車、船舶等。 CAN控制器通過(guò)組成總線
2017-12-27 13:40:0730720 
的CAN總線通信協(xié)議,才能完成數(shù)據(jù)準(zhǔn)確可靠的傳輸。目前,也存在一些CAN總線產(chǎn)品開發(fā)公司定制的協(xié)議,如:CANOpen,DeviceNet等,與其產(chǎn)品捆綁在一起,而且用戶的需求不同,其協(xié)議設(shè)計(jì)不能完全合乎要求。用戶在自行開發(fā)整個(gè)系統(tǒng)時(shí),必須根據(jù)需
2018-01-08 15:01:029 在CAN網(wǎng)絡(luò)中,所有節(jié)點(diǎn)的數(shù)據(jù)收發(fā)共享一條總線。當(dāng)面對(duì)未知的多節(jié)點(diǎn)CAN總線網(wǎng)絡(luò)時(shí),如何準(zhǔn)確分析各節(jié)點(diǎn)間的通信協(xié)議呢?
2018-03-06 16:41:534926 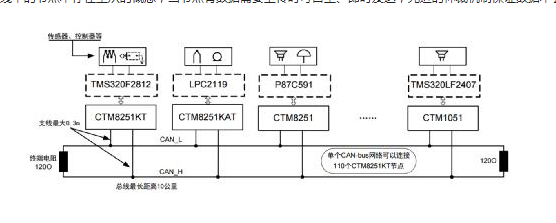
CAN總線是一種基于優(yōu)先級(jí)的串行通信網(wǎng)絡(luò),采用載波監(jiān)聽(tīng)多路轉(zhuǎn)換沖突避免協(xié)議,CAN總線中傳輸?shù)臄?shù)據(jù)幀的起始部分為數(shù)據(jù)的標(biāo)識(shí)符,標(biāo)識(shí)符可以區(qū)分消息又可以表示消息的優(yōu)先級(jí)(0 的優(yōu)先級(jí)最高)。
2018-04-24 17:48:1619009 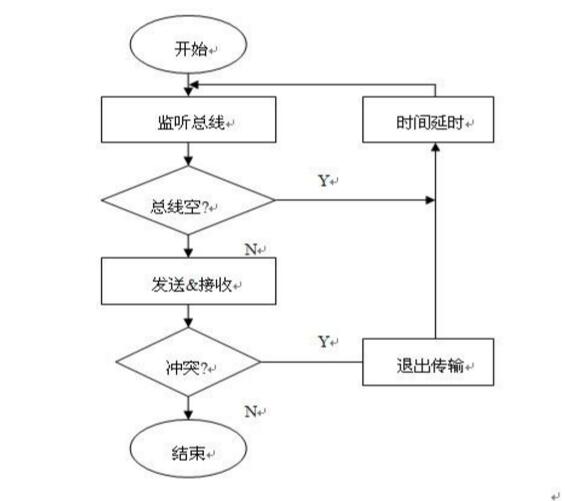
本文說(shuō)的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽(tīng)見(jiàn)CAN總線,也常聽(tīng)見(jiàn)CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來(lái)劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073332 
CAN是一種多主串行總線,可連接兩個(gè)或多個(gè)電子模塊或節(jié)點(diǎn)。總線互連(通常)是具有差分信令的雙線雙絞線。 CAN物理層收發(fā)器將CAN協(xié)議邏輯1和0轉(zhuǎn)換為總線上的顯性和隱性位,如圖1所示。
2019-04-06 08:01:004406 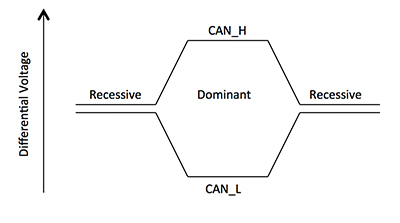
總線:
支持各個(gè)ECU之間進(jìn)行的數(shù)據(jù)傳遞
CAN和VAN通迅協(xié)議不需要任何特殊總線(光導(dǎo)纖維、Hertz波、 電線)
電線連接在汽車應(yīng)用最好。
2019-01-25 08:00:0015 目前,已有很多學(xué)者對(duì)CAN總線通信性能進(jìn)行分析研究。文中在分析CAN總線通信控制協(xié)議的基礎(chǔ)上,在MATLAB/Sinulink軟件Stateflow仿真環(huán)境下,利用有限狀態(tài)機(jī)理論對(duì)CAN總線通信系統(tǒng)
2019-06-13 15:20:542851 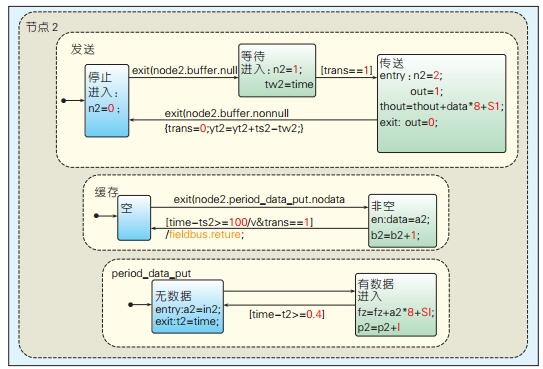
CANOpen系列教程02_理解CAN總線協(xié)議
2020-03-06 16:17:306389 CAN總線網(wǎng)絡(luò)測(cè)試: --滿足汽車電子產(chǎn)品不同CAN-BUS總線車型協(xié)議解析與逆向分析應(yīng)用 汽車教學(xué)實(shí)訓(xùn)CAN模擬控制仿真: --CAN-BUS車載網(wǎng)絡(luò)/車聯(lián)網(wǎng)示教臺(tái)/CAN總線教學(xué)實(shí)訓(xùn)箱應(yīng)用 汽車電檢測(cè)試應(yīng)用解決方案: --汽車CAN總線組合儀表電檢/汽車IP總成電檢/汽車電子電器電檢臺(tái)應(yīng)用
2020-03-06 14:28:36949 CAN協(xié)議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節(jié)點(diǎn)都可以偵聽(tīng)到所有傳輸?shù)膱?bào)文。無(wú)法將報(bào)文單獨(dú)發(fā)送給指定節(jié)點(diǎn);所有節(jié)點(diǎn)都將始終捕獲所有報(bào)文。但是,CAN硬件能夠提供本地過(guò)濾
2020-04-03 15:32:2213499 CAN總線通信協(xié)議詳細(xì)如下。
2021-04-19 16:54:3875 CAN總線協(xié)議及CAN在工業(yè)控制中的應(yīng)用說(shuō)明。
2021-04-20 11:14:0127 (OSI參考模型介紹)是肯定的,我們可以看一下相關(guān)的文檔可知:CAN遵從OSI模型。 上面這一點(diǎn)大部分人都是熟知的。 第二、CAN總線分為哪幾層 根據(jù)《FPGA和USB3.0通信-USB3.0協(xié)議介紹》中總線、協(xié)議、接口關(guān)系可知: CAN總線內(nèi)容整體比較簡(jiǎn)單(相對(duì)),肯定沒(méi)有USB、PCIe協(xié)
2021-11-18 16:35:555376 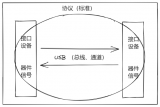
使用STM32Cube MX為STM32 CAN總線快速上手教程_HAL庫(kù)_CAN協(xié)議_STM32前言博主也是剛接觸CAN協(xié)議的新手,如有不對(duì)的地方歡迎交流本文旨在使用STM32Cube MX快速
2021-12-04 17:36:0533 ),是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,用來(lái)取代昂貴而笨重的配電線束。CAN協(xié)議的使用廣泛這一特點(diǎn)使其很快延伸到自動(dòng)化控制以及工業(yè)領(lǐng)域中。 CAN協(xié)議的特性包括完
2022-01-15 17:04:485782 本資料是面向CAN總線初學(xué)者的CAN入門書。對(duì)CAN是什么、CAN的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進(jìn)行了說(shuō)明。
2022-04-02 16:35:3223 CAN總線協(xié)議(Controller Area Network),控制器局域網(wǎng)總線,是德國(guó)BOSCH(博世)公司研發(fā)的一種串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。
2022-09-09 12:13:422114 高速CAN總線上為顯性電平(邏輯0)時(shí),CAN_H為3.5V、CAN_L為1.5V,此時(shí)電壓差是2V,顯性狀態(tài)的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時(shí),CAN_H和CAN_L都為2.5V,此時(shí)電壓差就是0V,隱性狀態(tài)的CAN總線電壓范圍。
2022-09-13 16:57:223633 CAN總線上傳輸?shù)男畔⒎Q為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
2022-10-17 15:09:493135 CAN總線是一種常用的總線,對(duì)于剛開始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識(shí)符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識(shí)符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識(shí)符。
2023-02-09 15:43:152666 2 路 CAN 接口的高性能型 CAN-bus 總線通訊分析儀。該分析儀可兼容 USB2.0 總線全速規(guī)范,PC 端可以通過(guò) USB 接口快速連接至 CAN-bus 網(wǎng)絡(luò),構(gòu)成現(xiàn)場(chǎng)總線實(shí)驗(yàn)室、工業(yè)控制
2023-04-23 12:03:36273 
節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過(guò)實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。CAN總線錯(cuò)誤類型CAN總線協(xié)議規(guī)定了5種CAN錯(cuò)誤類型:位錯(cuò)誤[發(fā)送器]位填充錯(cuò)誤[接收器]格式錯(cuò)誤[接收
2022-06-09 09:46:531176 
節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過(guò)實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。CAN總線錯(cuò)誤類型CAN總線協(xié)議規(guī)定了5種CAN錯(cuò)誤類型:位錯(cuò)誤[發(fā)送器]位填充錯(cuò)誤[接收器]格式錯(cuò)誤[接收
2022-06-02 09:41:24813 CAN總線 CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在汽車產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低功耗、低成本的要求
2023-07-18 11:10:462821 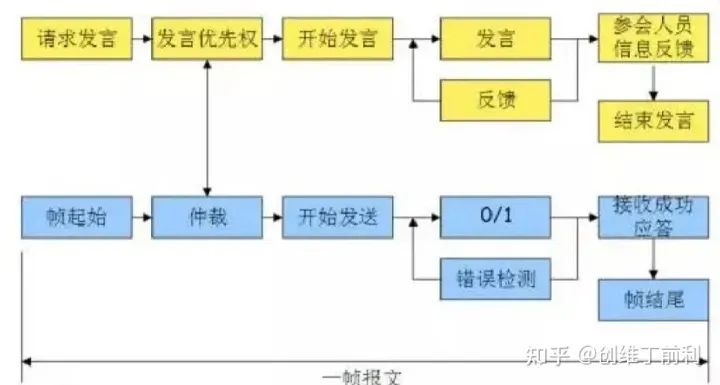
認(rèn)識(shí)CAN 總線錯(cuò)誤的第一步就是了解認(rèn)識(shí)CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463228 
CAN總線(Controller Area Network)是一種廣泛應(yīng)用于汽車、工業(yè)自動(dòng)化和其他領(lǐng)域的串行通信協(xié)議。以下是幾種常見(jiàn)的CAN總線通信協(xié)議。
2023-08-18 14:40:128850 
1、CAN總線的常見(jiàn)故障 CAN總線錯(cuò)誤分析與解決 當(dāng)CAN總線出現(xiàn)故障或數(shù)據(jù)傳輸異常時(shí),往往會(huì)出現(xiàn)多種奇怪的故障現(xiàn)象,如儀表板顯示異常,車輛無(wú)法啟動(dòng),啟動(dòng)后無(wú)法熄滅,車輛動(dòng)力性能下降,某些電控系統(tǒng)
2023-09-14 16:30:071595 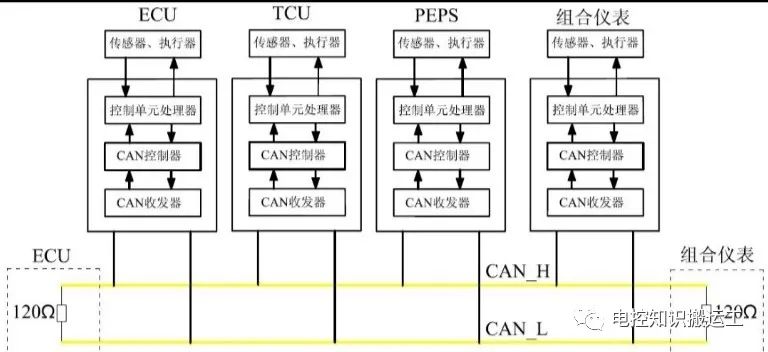
can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053607 電子發(fā)燒友網(wǎng)站提供《汽車前照燈CAN總線多路傳輸系統(tǒng)的研究與設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-08 14:30:130 CAN協(xié)議棧 汽車CAN協(xié)議棧是一種軟件組件,用于實(shí)現(xiàn)汽車電子系統(tǒng)中的CAN總線通信功能。它包含了一系列的功能軟件,用于處理CAN總線的物理層和數(shù)據(jù)鏈路層的通信協(xié)議。 汽車CAN協(xié)議棧的功能軟件主要
2023-10-27 16:16:541516 
CAN(Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,以此取代昂貴而笨重的配電線束。
2023-11-01 16:39:54513 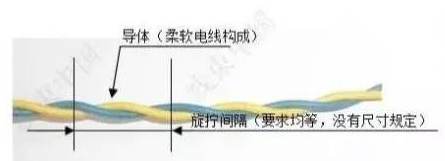
CAN總線通訊協(xié)議由德國(guó)博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線通訊協(xié)議的量產(chǎn)車型是1991年的奔馳S級(jí)轎車,至今CAN總線依舊是車內(nèi)主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開始
2023-12-21 14:03:45663 
CAN總線協(xié)議是一種串行通訊協(xié)議,主要用于汽車和工業(yè)自動(dòng)化領(lǐng)域,實(shí)現(xiàn)了實(shí)時(shí)應(yīng)用的需求。 首先,CAN總線協(xié)議的基本概念包括報(bào)文、信息路由和位速率。在CAN系統(tǒng)中,總線上傳輸?shù)男畔⒁圆煌袷降膱?bào)文發(fā)送
2024-01-19 17:47:57277 總線的特性。 首先,高速CAN總線是指數(shù)據(jù)傳輸速率較高的CAN總線,其中包括CAN 2.0A和CAN 2.0B兩種協(xié)議。CAN 2.0A支持11位標(biāo)準(zhǔn)幀和29位擴(kuò)展幀,最大傳輸速率可達(dá)到1 Mbps
2024-01-31 14:09:01497
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論