
") 什么是物流科技 自動(dòng)駕駛技術(shù)的加持又將帶來(lái)什么變化
什么是物流科技 自動(dòng)駕駛技術(shù)的加持又將帶來(lái)什么變化
2018 全球人工智能與機(jī)器人峰會(huì)(CCF-GAIR)在深圳召開,峰會(huì)由中國(guó)計(jì)算機(jī)學(xué)會(huì)(CCF)主辦,雷鋒網(wǎng)、香港中文大學(xué)(深圳)承辦,得到了寶安區(qū)政府的大力指導(dǎo),是國(guó)內(nèi)人工智能和機(jī)器人學(xué)術(shù)界、工業(yè)界及投資界三大領(lǐng)域的頂級(jí)交流盛會(huì),旨在打造國(guó)內(nèi)人工智能領(lǐng)域最具實(shí)力的跨界交流合作平臺(tái)。
在峰會(huì)的智能駕駛專場(chǎng)上,PlusAI(智加科技)的工程副總裁付強(qiáng)發(fā)表了題為“自動(dòng)駕駛與物流科技”的演講,分享他對(duì)自動(dòng)駕駛商業(yè)落地的一些觀點(diǎn)。
PlusAI成立于2016年,是最早獲得美國(guó)加州路測(cè)牌照的企業(yè)之一,目前,PlusAI在硅谷、北京、上海、西安都設(shè)有運(yùn)營(yíng)或者研發(fā)中心,并且與斯坦福大學(xué)和西安交通大學(xué)建立了合作關(guān)系,今年4月、5月PlusAI分別聯(lián)手一汽和蘇寧進(jìn)行了港口和倉(cāng)到倉(cāng)的自動(dòng)駕駛演示。
以下是演講全文,新智駕在不改變?cè)獾那闆r下進(jìn)行了編輯:
首先帶大家回顧一下什么是物流科技。
物流產(chǎn)業(yè)在我國(guó),尤其是改革開放以來(lái),在我們國(guó)家走向市場(chǎng)經(jīng)濟(jì)的發(fā)展過程中,一直扮演非常重要的角色。現(xiàn)在物流占全國(guó)GDP的比重大約是16%,大家平時(shí)的吃穿住行都離不開物流的參與。如何通過物流科技去提升物流的效率就變得非常重要。
物流經(jīng)歷了人工生產(chǎn)和機(jī)械化的過程,現(xiàn)在已經(jīng)進(jìn)入了一個(gè)自動(dòng)化,甚至智能化的階段。所謂機(jī)械化,不過是采用大量車輛,原來(lái)用木牛流馬變成了在汽車、火車和飛機(jī)、貨船等等。但自動(dòng)化的過程則產(chǎn)生了許多新的技術(shù)。比如在天貓、京東上購(gòu)物,系統(tǒng)能夠迅速識(shí)別訂單,自動(dòng)將貨物送上傳送帶進(jìn)行打包,然后送到每個(gè)人手中。可能今天晚上11點(diǎn)下的單,明天一早就能拿到。
智慧化則是物流科技新的演進(jìn)方向。因?yàn)樵絹?lái)越多的互聯(lián)網(wǎng)或者具有人工智能背景的公司紛紛開始涌入,為物流行業(yè)帶來(lái)很多智慧化的改變。
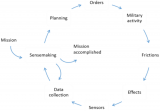
具體來(lái)講,從最左側(cè)的供貨商到最右側(cè)的消費(fèi)者,在不同的階段,物流科技智慧化過程大概滲透了三個(gè)環(huán)節(jié):
在末端的是配送,現(xiàn)在配送已經(jīng)有了許多自動(dòng)化方式,有些物流公司也在強(qiáng)調(diào)最后一公里,即在配送的過程中,通過無(wú)人機(jī)、快遞柜或者自動(dòng)駕駛配送車完成最后一公里。
而在中間的,是倉(cāng)儲(chǔ),現(xiàn)在,許多智慧化的工作集中在倉(cāng)儲(chǔ),其中跟自動(dòng)駕駛比較相關(guān)的是AGV,在倉(cāng)庫(kù)里可以實(shí)現(xiàn)局部自動(dòng)駕駛,完成貨物在倉(cāng)庫(kù)內(nèi)的移動(dòng)。另外,基于RFID的技術(shù)、分揀、包裝、識(shí)別等,現(xiàn)在都應(yīng)用得非常廣泛。
而從供貨端開始的運(yùn)輸,則是PlusAI比較相關(guān)的一個(gè)環(huán)節(jié)。這一環(huán)節(jié),除了車貨匹配、無(wú)車承運(yùn)人、新能源汽車以外,很重要的一點(diǎn)就是無(wú)人駕駛。這一環(huán)節(jié)的運(yùn)輸過程更多的是指?jìng)}對(duì)倉(cāng)的運(yùn)輸。貨品從供貨商運(yùn)輸?shù)较M(fèi)者的路程中,不可避免會(huì)有從一個(gè)倉(cāng)庫(kù)運(yùn)送到另一個(gè)倉(cāng)庫(kù)的過程,這里存在著復(fù)雜的場(chǎng)景。例如從倉(cāng)庫(kù)運(yùn)輸?shù)礁咚偕希罱K運(yùn)送到另一個(gè)倉(cāng)庫(kù)或者一個(gè)集散點(diǎn),這就是一個(gè)典型的倉(cāng)對(duì)倉(cāng)的物流。
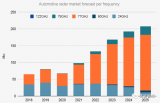
針對(duì)物流長(zhǎng)途干線運(yùn)輸過程,有機(jī)構(gòu)進(jìn)行了以上成本拆分(如上圖)。
我認(rèn)為自動(dòng)駕駛在物流的中運(yùn)輸能夠取得較大成果的原因是,在進(jìn)入經(jīng)濟(jì)領(lǐng)域之前,首先自動(dòng)駕駛能讓運(yùn)輸更加安全。
提到重型卡車,大家的第一反應(yīng)可能就是網(wǎng)上流傳的那些非常慘烈的交通事故,大貨車一出事故就非常嚴(yán)重。據(jù)我自己走訪的統(tǒng)計(jì),在大貨車的交通事故中,可能有一半以上是由疲勞駕駛造成的。因?yàn)榇筘涇囁緳C(jī)一天要駕駛很長(zhǎng)的時(shí)間,因此多少會(huì)產(chǎn)生疲倦,導(dǎo)致反應(yīng)變得遲鈍,陷入間歇性的精神不集中,這些可能是造成事故的主要原因。
而自動(dòng)駕駛,大家可以想象,算法是不會(huì)疲勞的,一旦我們證明算法的可行性,是一定不會(huì)存在隨著時(shí)間的增加效果有所衰減的狀況的。所以,需要強(qiáng)調(diào)的是,自動(dòng)駕駛更安全。
除了安全之外,自動(dòng)駕駛還能降低成本。物流干線運(yùn)輸?shù)某杀尽:艽笠徊糠质莵?lái)源于運(yùn)輸費(fèi)。而自動(dòng)駕駛卻能節(jié)約燃油。通過改變整流罩和改裝的辦法,可以實(shí)現(xiàn)節(jié)油,這是一方面。另一方面,有統(tǒng)計(jì)表明,一個(gè)有經(jīng)驗(yàn)的司機(jī)比一個(gè)新手司機(jī)省大概15%的油。老司機(jī)對(duì)線路比較熟悉,哪個(gè)地方有轉(zhuǎn)彎、下坡他都比較熟悉,因此能夠提前控制,從而節(jié)省燃油。自動(dòng)駕駛也可以實(shí)現(xiàn)接近老司機(jī)的使用成本。
另外一點(diǎn)是節(jié)約人力,現(xiàn)在,很多長(zhǎng)線運(yùn)輸通常是采用多名司機(jī)輪流駕駛的方式,避免產(chǎn)生駕駛疲勞的問題。而L4級(jí)的自動(dòng)駕駛,即使是在高速上的實(shí)現(xiàn),一名安全員也就夠了,顯著節(jié)約了人力。
我們?cè)?jīng)與蘇寧物流合作過一個(gè)項(xiàng)目,打造了一輛自動(dòng)駕駛卡車,希望一方面減少了交通事故,另一方面能減少碰瓷的可能。
接下來(lái)講一些自動(dòng)駕駛技術(shù)上的東西。自動(dòng)駕駛大體上分成這幾個(gè)模塊:
首先是傳感器,激光雷達(dá)就是一種傳感器,它好比人的眼睛、耳朵。傳感器收集周邊感知的信息,然后通過感知算法,將這些信息抽象成計(jì)算機(jī)可以理解的概念。讓系統(tǒng)識(shí)別物體、車道線、紅綠燈,再?zèng)Q定該如何行駛。定位則是向系統(tǒng)提供具體的位置信息,距離目的地的路程。
有了定位和感知之后,就需要進(jìn)行道路的規(guī)劃。A點(diǎn)走到B點(diǎn),應(yīng)該走哪條路,是否在要立刻變道,是否要減速繞行等。規(guī)劃之后的控制,則是將規(guī)劃的結(jié)果轉(zhuǎn)化成給汽車控制系統(tǒng)的指令,進(jìn)行加速、減速,調(diào)整方向盤等。這嚴(yán)重依賴于車載平臺(tái),實(shí)現(xiàn)它的線功能。
接下來(lái)進(jìn)入一些稍微細(xì)一點(diǎn)的領(lǐng)域,環(huán)境感知中的人工智能。
感知大體上是這樣,自動(dòng)駕駛車輛能夠感知到周圍的車,判斷出哪些有碰撞的風(fēng)險(xiǎn),哪些沒與。自動(dòng)駕駛車還能感知到了周圍車輛的速度,與周圍車的距離、車道線等等,這是一個(gè)簡(jiǎn)單的感知。
人工智能在感知系統(tǒng)上是有很多應(yīng)用的。在自動(dòng)駕駛這個(gè)領(lǐng)域,我首先想討論的就是大數(shù)據(jù)。大家知道在自動(dòng)駕駛領(lǐng)域,數(shù)據(jù)量是很大的,一臺(tái)車行駛幾公里后,就積累了大量的視覺數(shù)據(jù)。大數(shù)據(jù)強(qiáng)調(diào)的是規(guī)模。如何讓大數(shù)據(jù)達(dá)到規(guī)模呢?行業(yè)中大體有兩個(gè)方向,一個(gè)是追求一致性,一個(gè)是追求通用性。
所謂追求一致性,就是所有積累到的大數(shù)據(jù),尤其是環(huán)境感知數(shù)據(jù),都是用同一款攝像頭,安裝在同一個(gè)位置產(chǎn)生的。這樣保證了所有的數(shù)據(jù)都是高度一致的。接著,使用這種高度一致的數(shù)據(jù)做訓(xùn)練,最后量產(chǎn)的時(shí)候,也同樣要求每一輛車將同樣的攝像頭安裝在同一個(gè)位置,所有的光圈、焦距我都調(diào)校一致,最后也能夠取得一個(gè)比較好的成果。這樣做固然有其優(yōu)點(diǎn),但是或多或少會(huì)產(chǎn)生一些過擬合的問題。
還有一個(gè)是通用性,相信諸位在學(xué)習(xí)駕駛的時(shí)候,坐在車內(nèi),還是能夠識(shí)別車道線、紅綠燈的,因?yàn)榇蠹以谲囃獾臅r(shí)候就已經(jīng)能識(shí)別這些東西了。當(dāng)人類在識(shí)別車道線、障礙物的時(shí)候,是不需要調(diào)節(jié)光線、焦距的,即使是看照片,不同的攝像頭,參數(shù)差距很大,攝像視角也不同,人類能識(shí)別出物體。所以,在自動(dòng)駕駛領(lǐng)域,更多的時(shí)候應(yīng)該強(qiáng)調(diào)數(shù)據(jù)通用性。
在采集訓(xùn)練數(shù)據(jù)的時(shí)候,我們不光有自采的來(lái)自不同攝像頭數(shù)據(jù),也采取了來(lái)自合作伙伴的數(shù)據(jù),甚至是自公開資料,比如說YouTube上的行車記錄儀數(shù)據(jù)。通過合理的標(biāo)注的方式進(jìn)行標(biāo)注,這樣就能夠保證最終的模型,相比起一些過擬合的情況,能夠有更好的通用性。不會(huì)出現(xiàn)當(dāng)攝像頭的生產(chǎn)制造工藝出現(xiàn)了偏差,或者焦距、可視角度不一樣,或者安裝位置的改變,就無(wú)法識(shí)別的情況。
大家看到現(xiàn)在很多的相關(guān)事故,自動(dòng)駕駛失靈的原因就是一致性做得太強(qiáng),通用性做得不夠。當(dāng)過多地告訴計(jì)算機(jī)高度一致的信息的時(shí)候,當(dāng)這個(gè)算法處理稍微不一樣的數(shù)據(jù)時(shí),就可能會(huì)失靈,與其這樣,我們不如更多地強(qiáng)調(diào)通用性。而研究人工智能的目的。就是讓它更好地模擬人類思考、感知社會(huì)的方式。
第二點(diǎn)想要討論的,就是計(jì)算的開銷。精確度是現(xiàn)在很多算法追求的指標(biāo),但延遲也很重要,現(xiàn)在很多成熟的公司也都注意到了這一點(diǎn)。實(shí)際上,在駕駛的過程中,尤其是在高速的場(chǎng)景中,幾十毫秒的延遲就會(huì)產(chǎn)生不同的結(jié)果,所以在算法的考慮上,在精度要達(dá)到要求之外,還要降低計(jì)算的開銷。這其中還有很多計(jì)算加速的功能,應(yīng)該如何建好,如何挖掘也非常關(guān)鍵。計(jì)算的精度至少要和它的算法感知的精準(zhǔn)度同等重要。
第三點(diǎn)想要討論的,是成本的控制。我們的計(jì)算單元、感知傳感器要達(dá)到何種程度,才能夠保證在同樣的精準(zhǔn)度下,數(shù)據(jù)都能跑通,而且不失準(zhǔn)確性,同時(shí)把成本控制在范圍之內(nèi)。
以上三大點(diǎn)是我們?cè)谧詣?dòng)駕駛上的一些思考,這也是需要行業(yè)人士應(yīng)該花時(shí)間解決的問題。
我們的數(shù)據(jù)覆蓋了中國(guó)和美國(guó)都絕大部分省市和州。在中國(guó)的省級(jí)行政單位和美國(guó)的州級(jí)行政單位我們都有數(shù)據(jù),這些數(shù)據(jù)的采集是非常大的工作,并不是靠自建一個(gè)車隊(duì)完成的。
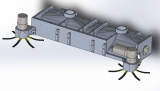
再來(lái)看看多傳感器融合,這里舉一個(gè)我們遇到的例子,這個(gè)也是用激光雷達(dá)、攝像頭和毫米波雷達(dá)的方案。現(xiàn)在很多車廠在制作緊急制動(dòng)的時(shí)候,更強(qiáng)調(diào)毫米波雷達(dá)的功能,但對(duì)于中距離雷達(dá)來(lái)說,例子中的物體有點(diǎn)遠(yuǎn),探測(cè)不到,對(duì)遠(yuǎn)距離雷達(dá)來(lái)說,其視角比較窄。不管是通過視覺還是通過激光雷達(dá),都可以對(duì)物體的檢測(cè)產(chǎn)生一個(gè)很好的彌補(bǔ)。
多傳感器不光是傳感器的冗余,從功能安全的角度出發(fā),當(dāng)有一個(gè)傳感器不能工作,即使是低成本傳感器組合,也能夠達(dá)到規(guī)避風(fēng)險(xiǎn)的目的,實(shí)現(xiàn)真正安全的自動(dòng)駕駛。只要采集的數(shù)據(jù)足夠多,這種說法是能夠被證明的。
我們采用的是前視為主的多傳感器融合的技術(shù),選用了成本比較低的攝像頭。當(dāng)有正向的陽(yáng)光攝入時(shí),會(huì)有一道炫光,這時(shí)候我們可以進(jìn)行動(dòng)態(tài)的調(diào)整,提升毫米波雷達(dá)在感知中的比重,降低攝像頭的比重。當(dāng)回到正常的光線中時(shí),再將比重調(diào)回來(lái),實(shí)現(xiàn)動(dòng)態(tài)的對(duì)多傳感器融合算法的調(diào)整。
再回歸到自動(dòng)駕駛與物流這個(gè)話題。回顧一些大事,2015年的時(shí)候,Uber首先實(shí)現(xiàn)了無(wú)人駕駛貨車的應(yīng)用,用貨車運(yùn)輸了一車啤酒;2017年,特斯拉也發(fā)布了L3級(jí)的卡車;2018年4月,我們和解放聯(lián)合發(fā)布了解放最新一代卡車J7。5月份,我們和蘇寧也發(fā)起了倉(cāng)對(duì)倉(cāng)物流的實(shí)現(xiàn),在這個(gè)場(chǎng)景中,我們實(shí)現(xiàn)了從蘇寧的一個(gè)倉(cāng)到另一倉(cāng)的全自動(dòng)化,當(dāng)然,在離開這個(gè)倉(cāng)庫(kù)之前,我們配了一名司機(jī)。


































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論