
") 無人駕駛汽車最新消息:蘋果堅(jiān)持自主系統(tǒng) 深度學(xué)習(xí)使得攝像頭具備3D能力
無人駕駛汽車最新消息:蘋果堅(jiān)持自主系統(tǒng) 深度學(xué)習(xí)使得攝像頭具備3D能力
在蘋果宣布停止公布手機(jī)銷量,以富士康和和碩為代表的供應(yīng)商下調(diào)新款iPhone銷售預(yù)期,市場(chǎng)一致看衰的背景下,蘋果用什么來提振投資人的信心呢?
無人駕駛被蘋果拿出來說事了。也是在上周,有媒體報(bào)道,庫(kù)克證實(shí)蘋果正在研發(fā)用于無人駕駛汽車的自主系統(tǒng),這也是庫(kù)克為數(shù)不多的第二次公開披露蘋果關(guān)于無人駕駛方面的計(jì)劃和進(jìn)展。或許蘋果要為它的無人駕駛項(xiàng)目提速了。
蘋果無人駕駛研發(fā)成果秘而不宣
相比Google、特斯拉這類競(jìng)爭(zhēng)者,蘋果進(jìn)入無人駕駛的賽道稍晚,2014年才開始組建團(tuán)隊(duì),以“Project Titan”作為內(nèi)部代號(hào)。進(jìn)入的時(shí)間晚,并不意味著蘋果對(duì)無人駕駛項(xiàng)目不重視,當(dāng)庫(kù)克在2017年6月首次對(duì)外公開其無人車戰(zhàn)略的時(shí)候,將無人駕駛技術(shù)拔到“所有AI項(xiàng)目之母”的高度。
于是蘋果挖來了特斯拉負(fù)責(zé)整車研發(fā)和制造的高級(jí)副總裁DougField、大眾汽車集團(tuán)的首席數(shù)字官JohannJungwirth、福特車身結(jié)構(gòu)和沖壓專家AindreaCampbell、保時(shí)捷919技術(shù)總監(jiān)AlexanderHitzinger、特斯拉負(fù)責(zé)工程研發(fā)的副總裁ChrisPorritt……
今年7月,美國(guó)聯(lián)邦調(diào)查局指控蘋果前員工竊取商業(yè)機(jī)密的訴訟文件曝光了蘋果“Titan”項(xiàng)目的團(tuán)隊(duì)規(guī)模——5000人。
一開始,蘋果就把“盤子”鋪的很大。可是蘋果除了逐漸擴(kuò)大自己的測(cè)試車隊(duì)外(截止今年9月已達(dá)70輛,這個(gè)規(guī)模僅次于通用汽車的Cruise和Waymo),向外公布的研究成果對(duì)于無人駕駛技術(shù)并沒有突破性的指引。
比如類似于飛機(jī)的空中加油機(jī)一樣,讓汽車在行駛時(shí)通過“連接臂”共享電池系統(tǒng);讓無人駕駛汽車與iPhone、iPad或MacBook等蘋果設(shè)備同步,當(dāng)汽車遇到緊急情況需要人類接管時(shí),發(fā)送警報(bào)提醒正在使用這些設(shè)備的用戶及時(shí)接管汽車。
根據(jù)自動(dòng)駕駛初創(chuàng)公司Voyage聯(lián)合創(chuàng)始人MacCallister Higgins在網(wǎng)絡(luò)上放出一段蘋果第三代自動(dòng)駕駛測(cè)試車的視頻來看,相比前兩代測(cè)試車,蘋果也只是對(duì)毫米波雷達(dá)數(shù)量進(jìn)行調(diào)整,對(duì)傳感器列陣進(jìn)行優(yōu)化。
此外還有一些天馬行空的想法:怎么搞一個(gè)靜音車門,沒有方向盤和油門的情況內(nèi)飾怎么設(shè)計(jì),怎么把AR/VR設(shè)備放到車?yán)铮趺磻?yīng)用球形輪胎、甚至還準(zhǔn)備重新設(shè)計(jì)一款更美觀的激光雷達(dá)……
迄今,蘋果無人駕駛技術(shù)展現(xiàn)給大眾的印象是,它的研發(fā)更多停留在硬件和設(shè)計(jì)層面,蘋果最為擅長(zhǎng)的軟件開發(fā)、生態(tài)構(gòu)建等還沒有任何風(fēng)聲透出。值得玩味的是,蘋果在2015年買下了3個(gè)與車相關(guān)的頂級(jí)域名:apple.car,apple.cars和apple.auto,但是至今還未啟用。
用CarPlay接管無人車?蘋果沒那么天真
相信以蘋果公司的高度,它不會(huì)沒有認(rèn)識(shí)到一套充滿智慧的車載系統(tǒng)對(duì)于無人駕駛汽車的重要性。
2013年蘋果確定進(jìn)軍汽車領(lǐng)域時(shí)就制定了“iOS in the Car”計(jì)劃,并在次年的日內(nèi)瓦車展上展出了合作伙伴搭載的CarPlay——一套可以將用戶的iOS設(shè)備、iOS使用體驗(yàn)與汽車儀表盤進(jìn)行結(jié)合的車載系統(tǒng)。蘋果能用CarPlay來接管未來的無人車嗎?從目前來看,CarPlay還不具備這樣的能力。
用戶對(duì)CarPlay的槽點(diǎn)實(shí)在太多。
“支持的APP太少了,最基礎(chǔ)的專業(yè)導(dǎo)航都不支持。每當(dāng)我被迫用起蘋果坑爹的自帶導(dǎo)航時(shí),就無比懷念百度和高德。”
“CarPlay與汽車連接使用時(shí),經(jīng)常受手機(jī)信號(hào)的影響。手機(jī)信號(hào)不好或者行車抖動(dòng)會(huì)導(dǎo)致鏈接斷開,斷開后正在使用的導(dǎo)航、音樂之類的應(yīng)用也馬上關(guān)閉,好幾次差點(diǎn)出事!”
“蘋果系統(tǒng)一升級(jí),CarPlay系統(tǒng)就變得卡一點(diǎn),反應(yīng)也越來越遲鈍,點(diǎn)個(gè)圖標(biāo)也要等幾秒。”
“升級(jí)iOS 12后,數(shù)據(jù)線連接使用CarPlay時(shí),另外USB接口的U盤音樂不能播放,只能播放收音機(jī)與蘋果手機(jī)自帶的或手機(jī)app的音樂。”
“一連CarPlay,車載藍(lán)牙就失效,這個(gè)Bug好久了也沒見蘋果修復(fù)。”
……
當(dāng)然最讓人無法接受的是,大量用戶反映連接CarPlay后Siri無法使用,而在蘋果的規(guī)劃中,Siri是CarPlay的核心——讓司機(jī)在眼睛不離開道路的情況下通過語(yǔ)音完成操作。
CarPlay這么難用,Google的Android Auto,福特與微軟合作開發(fā)的SYNC也好不哪去。系統(tǒng)崩潰、觸屏難用、反應(yīng)速度慢這些問題也都在它們身上出現(xiàn)過,有些至今也沒解決。至于那些基于Android系統(tǒng)開發(fā)出來的車載系統(tǒng),其穩(wěn)定性和人機(jī)交互邏輯的槽點(diǎn)就更多了。
“小艾你好、小度你好、斑馬你好、Nomi你好……誰(shuí)家的車多了,開車還得記清那些開門暗號(hào)。”無人駕駛賽道玩家太多,車載系統(tǒng)的研發(fā),究其源頭同質(zhì)化嚴(yán)重,對(duì)于普通用戶來說,要想分清這些語(yǔ)言交互助手和它們所匹配的車型還很有些難度。
很顯然,無論是iOS還是Android都是基于手機(jī)的使用場(chǎng)景設(shè)計(jì)開發(fā)而來的,而汽車的使用場(chǎng)景和人機(jī)交互邏輯與手機(jī)完全不同,將iOS和Android稍稍修改就搬進(jìn)車內(nèi)注定是不會(huì)成功的。從庫(kù)克的這次表態(tài)來看,CarPlay可能成為蘋果無人車自主系統(tǒng)的一個(gè)過渡產(chǎn)品。
自主系統(tǒng)是蘋果布局無人駕駛的第一步
對(duì)于無人駕駛自主系統(tǒng)的研發(fā),蘋果無疑是有優(yōu)勢(shì)的,在蘋果龐大的商業(yè)帝國(guó)中,蘋果為它的Mac電腦開發(fā)了Mac OS系統(tǒng);為iPhone開發(fā)了iOS系統(tǒng);甚至連Apple Watch都有屬于自己的Watch OS系統(tǒng)。那么對(duì)于無人車,蘋果為什么不從底層開始,設(shè)計(jì)一套完全針對(duì)汽車駕駛場(chǎng)景的“Car OS”呢?
正如十年前手機(jī)行業(yè)面臨的變革一樣,無人駕駛技術(shù)也將對(duì)汽車行業(yè)產(chǎn)生翻天覆地的變化。在變化來臨之前,是先做車(硬件)還是先做系統(tǒng)(軟件)呢?
類似于“先有雞?還是先有蛋?”這個(gè)經(jīng)典的哲學(xué)問題,蘋果用iPhone的經(jīng)驗(yàn)進(jìn)行作答——用軟件定義硬件、用新技術(shù)定義舊行業(yè)。
自主系統(tǒng)是蘋果布局無人駕駛的第一步,然后就像用iPhone重新定義手機(jī)一樣,用AI重新定義汽車。未來,汽車除了被用于出行之外,還將會(huì)是移動(dòng)的空間,移動(dòng)的計(jì)算終端,移動(dòng)的能源終端,移動(dòng)的攝像機(jī),移動(dòng)的溫度計(jì),移動(dòng)的機(jī)器人……借鑒著當(dāng)前消費(fèi)電子領(lǐng)域的成功,用一套爛熟于心的流程,建立一個(gè)“軟件+硬件+服務(wù)”的全新汽車消費(fèi)生態(tài)。
就像iOS(軟件)之于iPhone(硬件),在自動(dòng)駕駛無人車上,蘋果在自主系統(tǒng)(軟件)之后,它的無人車(硬件)在哪?
其實(shí)蘋果一直都在尋找制造無人車的合適機(jī)會(huì)。由于蘋果在汽車研發(fā)上缺乏經(jīng)驗(yàn),在保證現(xiàn)有業(yè)務(wù)體系不受影響的前提下,不可能像特斯拉那樣的初創(chuàng)公司一開始就“赤膊上陣”,蘋果走的是一條委婉的“合作造車”路線。
合作伙伴的選擇一度讓蘋果頭痛。早期蘋果選擇的是加拿大的麥格納公司,之后則是寶馬和奔馳,甚至還與日本日產(chǎn)、中國(guó)比亞迪和英國(guó)的邁凱輪有過接觸,但都沒有達(dá)成具體的合作計(jì)劃,其中的主要原因就是蘋果太過強(qiáng)勢(shì),它想要主導(dǎo)權(quán),但車廠不愿將自己賴以安身立命的造車數(shù)據(jù)交給蘋果。
直到今年5月,蘋果才與大眾達(dá)成合作協(xié)議,共同開發(fā)自動(dòng)駕駛的無人車。不過項(xiàng)目是以對(duì)大眾T6廂式車的改造開始,蘋果重點(diǎn)對(duì)儀表盤和座椅等部分進(jìn)行改造,還計(jì)劃會(huì)加入各種傳感器和電子設(shè)備,底盤、車輪等動(dòng)力機(jī)械部分基本沒動(dòng)。
這或許只是蘋果與大眾進(jìn)行深度合作,開發(fā)具有前瞻性質(zhì)的自動(dòng)駕駛無人車之前的一次試探與磨合。根據(jù)蘋果的商業(yè)模式,它無論如何都不會(huì)放棄對(duì)硬件領(lǐng)域的滲透,無人車也是如此。
只憑一個(gè)攝像頭 3D目標(biāo)檢測(cè)成績(jī)也能媲美激光雷達(dá)
靠一個(gè)攝像頭拍下的圖像做3D目標(biāo)檢測(cè),究竟有多難?目前最先進(jìn)系統(tǒng)的成績(jī)也不及用激光雷達(dá)做出來的1/10。
一份來自劍橋的研究,用單攝像頭的數(shù)據(jù)做出了媲美激光雷達(dá)的成績(jī)。
還有好事網(wǎng)友在Twitter上驚呼:
這個(gè)能不能解決特斯拉不用激光雷達(dá)的問題?馬斯克你看見了沒?
靠“直覺”判斷
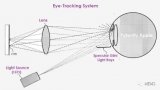
為何人單眼能做到3D識(shí)別,而相機(jī)卻做不到?
因?yàn)橹庇X。
人能夠根據(jù)遠(yuǎn)小近大的透視關(guān)系,得出物體的大小和相對(duì)位置關(guān)系。
而機(jī)器識(shí)別拍攝的2D照片,是3D圖形在平面上的投影,已經(jīng)失去了景深信息。
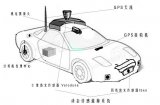
為了識(shí)別物體遠(yuǎn)近,無人車需要安裝激光雷達(dá),通過回波獲得物體的距離信息。這一點(diǎn)是只能獲得2D信息的攝像頭難以做到的。
為了讓攝像頭也有3D世界的推理能力,這篇論文提出了一種“正投影特征轉(zhuǎn)換”(OFT)算法。
作者把這種算法和端到端的深度學(xué)習(xí)架構(gòu)結(jié)合起來,在KITTI 3D目標(biāo)檢測(cè)任務(wù)上實(shí)現(xiàn)了領(lǐng)先的成績(jī)。
這套算法包括5個(gè)部分:
前端ResNet特征提取器,用于從輸入圖像中提取多尺度特征圖。
正交特征變換,將每個(gè)尺度的基于圖像的特征圖變換為正投影鳥瞰圖表示。
自上而下的網(wǎng)絡(luò),由一系列ResNet殘余單元組成,以一種對(duì)圖像中觀察到的觀察效果不變的方式處理鳥瞰圖特征圖。
一組輸出頭,為每個(gè)物體類和地平面上的每個(gè)位置生成置信分?jǐn)?shù)、位置偏移、維度偏移和方向向量等數(shù)據(jù)。
5. 非最大抑制和解碼階段,識(shí)別置信圖中的峰值并生成離散邊界框預(yù)測(cè)。
這種方法通過將基于圖像的特征映射到一個(gè)正交3D空間中,打破了圖像的束縛。在這個(gè)3D空間里,各個(gè)物體比例一致、距離也是有意義的。

效果遠(yuǎn)超Mono3D
作者用自動(dòng)駕駛數(shù)據(jù)集KITTI中3712張訓(xùn)練圖像,3769張圖像對(duì)訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)進(jìn)行檢測(cè)。并使用裁剪、縮放和水平翻轉(zhuǎn)等操作,來增加圖像數(shù)據(jù)集的樣本數(shù)量。
作者提出了根據(jù)KITTI 3D物體檢測(cè)基準(zhǔn)評(píng)估兩個(gè)任務(wù)的方法:最終要求每個(gè)預(yù)測(cè)的3D邊界框應(yīng)與相應(yīng)實(shí)際物體邊框相交,在汽車情況下至少為70%,對(duì)于行人和騎自行車者應(yīng)為50%。
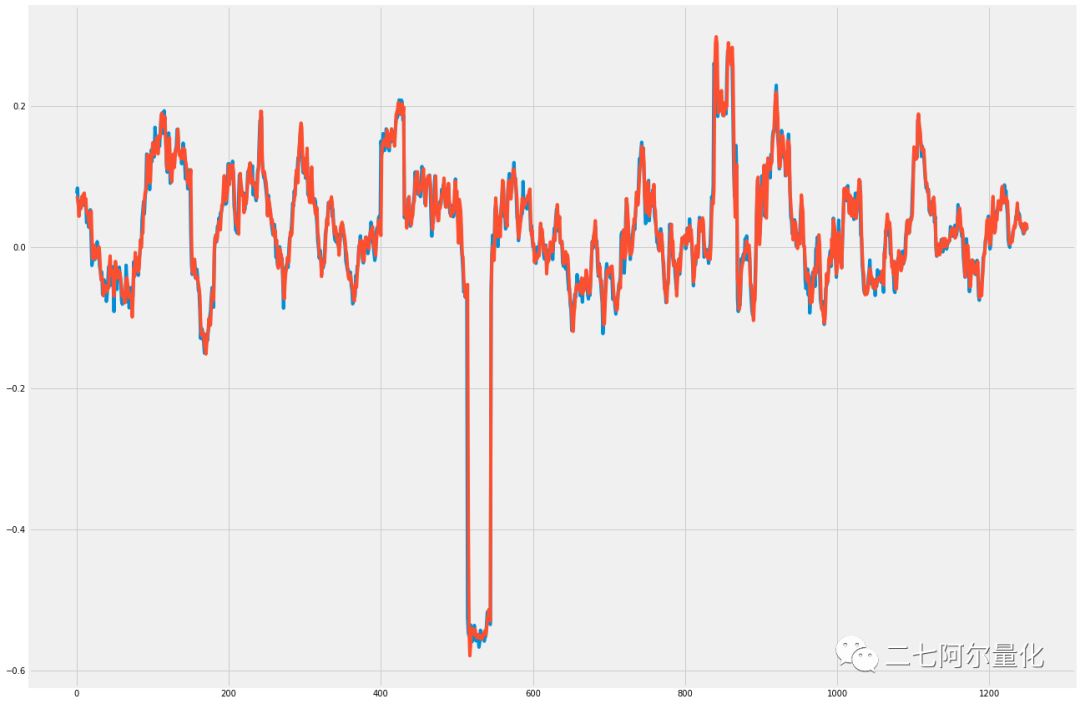
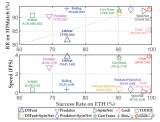
與前人的Mono3D方法對(duì)比,OFT在鳥瞰圖平均精確度、3D物體邊界識(shí)別上各項(xiàng)測(cè)試成績(jī)上均優(yōu)于對(duì)手。
尤其在探測(cè)遠(yuǎn)處物體時(shí)要遠(yuǎn)超Mono3D,遠(yuǎn)處可識(shí)別出的汽車數(shù)量更多。甚至在嚴(yán)重遮擋、截?cái)嗟那闆r下仍能正確識(shí)別出物體。在某些場(chǎng)景下甚至達(dá)到了3DOP系統(tǒng)的水平。
不僅在遠(yuǎn)距離上,正投影特征轉(zhuǎn)換(OFT-Net)在對(duì)不同距離物體進(jìn)行評(píng)估時(shí)都都優(yōu)于Mono3D。
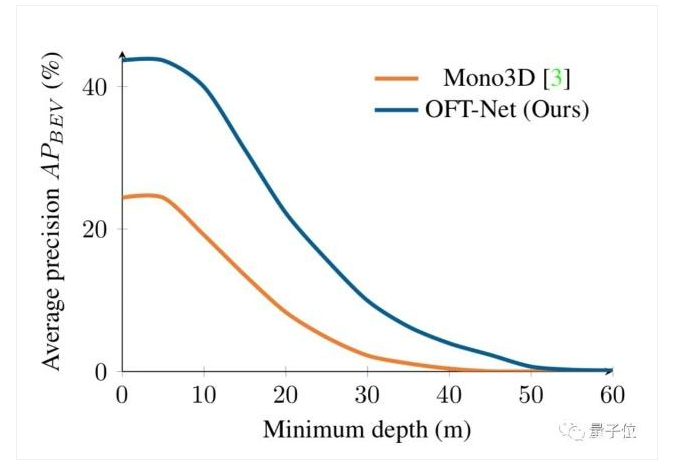
但是與Mono3D相比,這套系統(tǒng)性能也明顯降低得更慢,作者認(rèn)為是由于系統(tǒng)考慮遠(yuǎn)離相機(jī)的物體造成的。
在正交鳥瞰圖空間中的推理顯著提高了性能。為了驗(yàn)證這一說法,論文中還進(jìn)行了一項(xiàng)研究:逐步從自上而下的網(wǎng)絡(luò)中刪除圖層。
下圖顯示了兩種不同體系結(jié)構(gòu)的平均精度與參數(shù)總數(shù)的關(guān)系圖。

趨勢(shì)很明顯,在自上而下網(wǎng)絡(luò)中刪除圖層會(huì)顯著降低性能。
這種性能下降的一部分原因可能是,減少自上而下網(wǎng)絡(luò)的規(guī)模會(huì)降低網(wǎng)絡(luò)的整體深度,從而降低其代表性能力。
從圖中可以看出,采用具有大型自上而下網(wǎng)絡(luò)的淺前端(ResNet-18),可以實(shí)現(xiàn)比沒有任何自上而下層的更深層網(wǎng)絡(luò)(ResNet-34)更好的性能,盡管有兩種架構(gòu)具有大致相同數(shù)量的參數(shù)。(量子位)
資源
論文:
Orthographic Feature Transform for Monocular 3D Object Detection
https://arxiv.org/abs/1811.08188
作者表示等論文正式發(fā)表后,就放出預(yù)訓(xùn)練模型和完整的源代碼。






























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論