") 關(guān)于SCARA機器人整機方案的介紹和應(yīng)用
關(guān)于SCARA機器人整機方案的介紹和應(yīng)用

4月25日開幕的上海國際全觸與顯示展上,匯川技術(shù)發(fā)布了全新一代SCARA機器人整機產(chǎn)品和方案。
這是匯川技術(shù)首次為手機、液晶面板等精密工業(yè)提供的機器人新產(chǎn)品。全新的scara機器人涵蓋了臂長400mm、500mm、600mm、700mm、800mm、1000mm的全系列規(guī)格產(chǎn)品。
高精高效:
精確定位,重復(fù)精度達到0.01mm;
快速高效,標(biāo)準(zhǔn)循環(huán)時間可達0.42s
簡單易用:
機器人與視覺一鍵標(biāo)定,省時易用;
程序編程指令菜單化,簡單快速
優(yōu)越控制:
視覺通訊,指令靈活解析通訊內(nèi)容;
動態(tài)跟隨,快速抓取產(chǎn)品,提高效率;
優(yōu)越的加速度、速度控制,提升系統(tǒng)震動抑制能力
靈活擴展:
二次開發(fā)平臺,實現(xiàn)總線外部軸擴展及IEC61131-3標(biāo)準(zhǔn)PLC編程
多種權(quán)限控制:示教器/PC/HMI/遠程IO/API函數(shù)
在液晶面板行業(yè),SCARA機器人可廣泛應(yīng)用于精雕機、拋光機、清洗機的全自動上下料,以及背光源的疊膜設(shè)備生產(chǎn)。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
213文章
29664瀏覽量
212437 -
液晶面板
+關(guān)注
關(guān)注
10文章
483瀏覽量
40456
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機
發(fā)表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統(tǒng)、定位系統(tǒng)、導(dǎo)航系統(tǒng)、智能交互系統(tǒng)和運動系統(tǒng)協(xié)同工作,來實現(xiàn)為旅客準(zhǔn)確指路和提供服務(wù)的功能,以下是其詳細工作原理:
感知系統(tǒng)
傳感器類型 :機器人配備了多種傳感器
發(fā)表于 05-10 18:26
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
:
一、機器人視覺:從理論到實踐
第7章詳細介紹了ROS2在機器視覺領(lǐng)域的應(yīng)用,涵蓋了相機標(biāo)定、OpenCV集成、視覺巡線、二維碼識別以及深度學(xué)習(xí)目標(biāo)檢測等內(nèi)容。通過學(xué)習(xí),我認識到:
相機標(biāo)定的重要性
發(fā)表于 05-03 19:41
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
地圖構(gòu)建→路徑規(guī)劃→動態(tài)避障)等等
2. 機器人功能開發(fā)
相較于ROS入門21講,書中更是詳細書寫了關(guān)于機器人的功能開發(fā),并且十分完善,教程詳盡
傳感器數(shù)據(jù)處理:機器人通常配備多種傳感
發(fā)表于 04-27 11:24
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
識別聯(lián)調(diào)。
進迭時空致力于為智能機器人提供完整全棧優(yōu)化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI視覺感知、AI語音處理、自動避障、路徑規(guī)劃、運動控制等
發(fā)表于 04-25 17:59
EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機器人控制系統(tǒng)領(lǐng)域的應(yīng)用
傳統(tǒng)意義上的機器人可以分為服務(wù)型機器人和工業(yè)機器人。工業(yè)機器人作為機器人家庭中的成員,是目前世界上應(yīng)用較多和發(fā)展前景最為廣闊的一類。工業(yè)


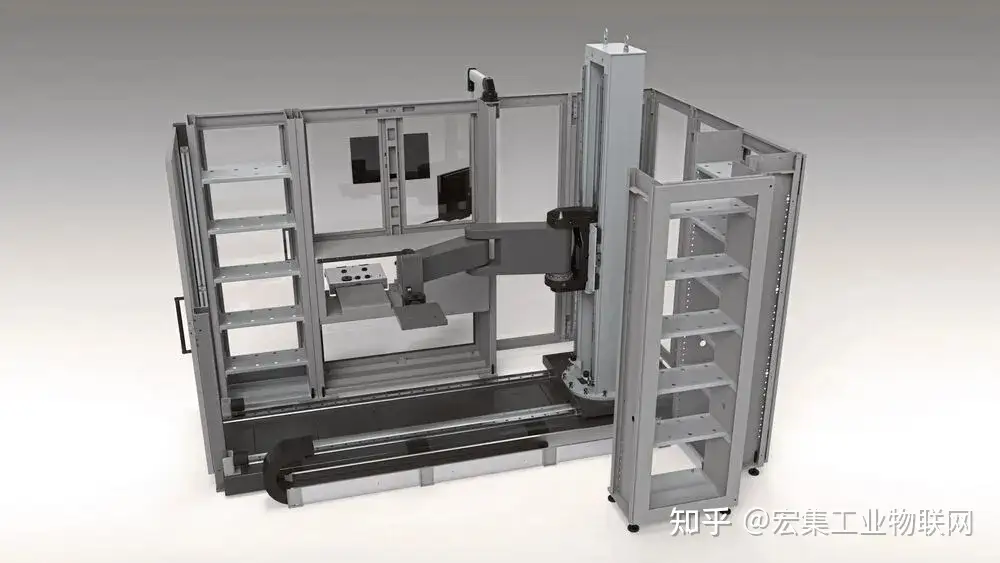
應(yīng)用案例 精準(zhǔn)控制,高效運行—宏集智能控制系統(tǒng)助力SCARA機器人極致性能
SCARA機器人的高效運行離不開強大的控制系統(tǒng)支持。宏集憑借其先進的智能控制系統(tǒng),為客戶提供了高效、靈活的自動化解決方案,確保SCARA機器人
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
具身智能機器人的基礎(chǔ)模塊,這個是本書的第二部分內(nèi)容,主要分為四個部分:機器人計算系統(tǒng),自主機器人的感知系統(tǒng),自主機器人的定位系統(tǒng),自主機器人
發(fā)表于 01-04 19:22
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
重要。
書中還詳細介紹了支持具身智能機器人的核心技術(shù)系統(tǒng),包括自主機器人計算系統(tǒng)、感知系統(tǒng)、定位系統(tǒng)及規(guī)劃和控制系統(tǒng)。
本書共分5個部分。
第1部分(第1章和第2章)介紹具身智能
發(fā)表于 12-28 21:12
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
將大模型的\"大腦\"裝入物理實體的\"身軀\",讓AI真正走進現(xiàn)實世界。這種革新不僅體現(xiàn)在稚暉君開源的人形機器人方案,更在“AI教母”李飛飛的VoxPoser
發(fā)表于 12-19 22:26
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示,機器人的角色為迎賓機器人,開發(fā)板負責(zé)人賓客出現(xiàn)監(jiān)聽
發(fā)表于 12-02 14:55
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
和開發(fā)指南分別上線GitHub和智元機器人官網(wǎng),“一站式”開源軟硬件全套圖紙和代碼,大幅降低了機器人技術(shù)開發(fā)的門檻,推動了全球機器人技術(shù)的普及與創(chuàng)新,讓“人形機器人人人造”理想照進現(xiàn)實
發(fā)表于 10-25 15:20
關(guān)于全自動裝車機器人的詳細介紹
裝車機器人的詳細介紹: ?一、技術(shù)特點 ?1.智能識別:全自動裝車機器人系統(tǒng)配備傳感器和視覺識別技術(shù),能夠識別不同類型和尺寸的產(chǎn)品。這種能力使得機器人能夠準(zhǔn)確區(qū)分貨物,為后續(xù)的裝載工作
【原創(chuàng)】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
_RAD2DEGdelta[Y_AXIS] = SCARA_psi SCARA_RAD2DEG運動平滑度參數(shù)設(shè)置補充說明,運動平滑度就是工業(yè)機器人中的CNT值,因為速度不可以瞬間改變,折線運動中,如果準(zhǔn)確運動到折點,折點速度為0
發(fā)表于 08-30 11:54





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論