") 怎樣制作手套控制的機(jī)械臂
怎樣制作手套控制的機(jī)械臂

第1步:材料清單
3~10k電阻
3-柔性傳感器電阻
3-舵機(jī)
面包板
Arduino Uno
電線
拉鏈
4-3-D打印件
我附上了我使用的確切材料的鏈接,因此即使您沒有從這些確切的鏈接訂購也可以輕松查找
3- 10k電阻器https://www.amazon.com/Projects-25EP51410K0-10K-R.。.
3- flex傳感器電阻器https://www.amazon.com/Creatron-Inc-Flex-傳感器-4 。..。..
3-伺服器https://www.amazon.com/Hitec-RCD-USA-31422-Standa.。.
Step 2:接線
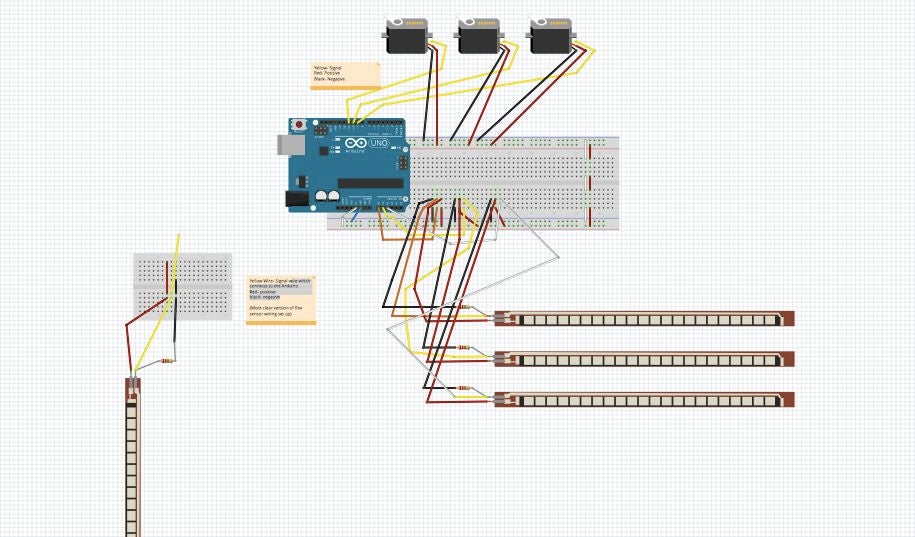
完全按照我設(shè)置的布線圖像在fritzing文件中。可以在兩個(gè)不同的部分中最好地查看布線。 1)從面包板和arduino到3-D印刷“臂”的連接2)從面包板和arduino到手套的連接。
3-D印刷臂連接連接到引腳11,10,9以及正區(qū)域和負(fù)區(qū)域的電線連接到3個(gè)不同的伺服系統(tǒng)。伺服器上的黑線連接到負(fù)區(qū)域,即面包板上的負(fù)柱。伺服上的紅線連接到正區(qū)域,即面包板上的正柱。最后黃色信號(hào)線連接到arduino。
在我的設(shè)置中,引腳9連接到基本伺服并由拇指控制在我的設(shè)置中,引腳10連接到頂部伺服并由中指在我的設(shè)置中,引腳11連接到中間伺服并由指針控制
2)手套連接在柔性傳感器上有兩個(gè)連接可用,在細(xì)線的一側(cè)運(yùn)行連接到信號(hào)和負(fù)端子。具有較厚圖案?jìng)?cè)的側(cè)面是與正極端子的連接。在連接信號(hào)和負(fù)極線的一側(cè),連接22k電阻和次級(jí)線。電線通過面包板直接通向負(fù)極端子。電阻器的一端連接到柔性傳感器,另一端連接到電線,電線連接到面包板,然后連接到銷中的arduino模擬電路。我使用的三個(gè)模擬引腳是A0,A1,A2。然后另一個(gè)柔性傳感器連接到面包板并連接到面包板上的正柱。在fritzing文件上有一個(gè)次要的更清晰的草圖,顯示正,負(fù)和信號(hào)連接。
(注意 - 不在面包板中的電線的大多數(shù)物理連接是焊接的,收縮包裝是
接線的最后部件是從arduino上的5V電源到正極柱的連接,接地(GND)連接到負(fù)極柱。在面包板上還有一些條形,它們將電路板兩端的負(fù)極柱連接在一起,并將正極柱連接在電路板的任一端。
附加說明 - 可以使用更長的電線來延長面包板和手套或面包板和三維印刷臂之間可用的松弛量(如果需要)
步驟3:接線和代碼說明
該程序的基礎(chǔ)類似于arduino中的旋鈕轉(zhuǎn)動(dòng)程序,整體作為電位器工作。手套上的柔性傳感器根據(jù)位置變化發(fā)送信號(hào),當(dāng)手套上的手指移動(dòng)時(shí),位置的變化向arduino發(fā)送信號(hào),然后呼吁3-D打印的“手”以相同的比例變化。
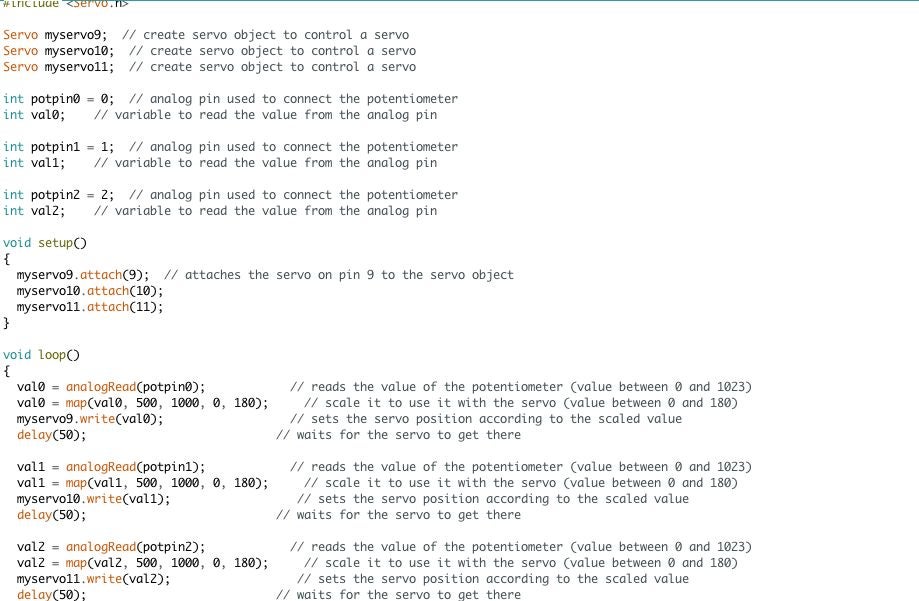
在代碼中,3個(gè)伺服器定義在引腳9,10,11下。模擬引腳A0,A1,A2連接電位器
在void設(shè)置中,伺服器連接到引腳
然后,void循環(huán)包括使用3個(gè)函數(shù)analogRead,map,write和delay
analogRead-讀取模擬引腳的值(與電位器通信的值)并且給出0到1023之間的值
Map-(value,fromLow,fromHigh,toLow,toHigh)map函數(shù)將模擬讀取值的值范圍從500,1000更改為0,180,因?yàn)?-180是伺服可以讀取的值的范圍,并在列表中的第一個(gè)下命名新值
servoWrite- arduino將值寫入伺服并移動(dòng)其位置acc ordingly
延遲 - 然后延遲導(dǎo)致程序在重新循環(huán)之前等待
步驟4:三維打印部件的機(jī)械結(jié)構(gòu)
附加了四個(gè)STL文件以及每個(gè)部分的圖像和視頻。沒有文件組裝的圖像,但有一個(gè)3D打印版本的圖像。四個(gè)不同的部件通過每個(gè)接頭處的3個(gè)伺服器連接。基部通過舵機(jī)連接到肩部,然后連接到第一臂文件,最后連接到第二臂文件。
步驟5:手套的機(jī)械構(gòu)造
手套的構(gòu)造相當(dāng)簡(jiǎn)單,將柔性傳感器熱粘到三根手指上在手套和拉鏈上用來保持電線就位。
注意 - 發(fā)現(xiàn)如果使用的這些特殊的柔性傳感器變得太臟,它會(huì)開始影響柔性傳感器的工作方式,因此,將磁帶放在傳感器上以保持其清潔
附加說明 - 當(dāng)僅使用運(yùn)行到arduino的USB線為電源供電時(shí),三維臂的運(yùn)動(dòng)可能會(huì)有點(diǎn)不穩(wěn)定它可以通過電池連接更多電源并將正極和負(fù)極連接到面包板上的正負(fù)極柱來改善
步驟6:最終產(chǎn)品
責(zé)任編輯:wv
-
機(jī)械臂
+關(guān)注
關(guān)注
13文章
553瀏覽量
25330
發(fā)布評(píng)論請(qǐng)先 登錄
PROFINET轉(zhuǎn)MODBUS TCP網(wǎng)關(guān)在機(jī)械臂通信操作中的應(yīng)用研究
GZCOM-NET:為機(jī)械臂測(cè)試帶來高效無線解決方案!

大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
海康威視推出大模型機(jī)械臂防碰撞相機(jī)
為控制Mercury X1和Mercury B1機(jī)械臂而設(shè)計(jì)的創(chuàng)新外骨骼

如何使用PLC控制myCobot 320機(jī)械臂

使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站

深度解析!RK3568 加持機(jī)械臂是如何實(shí)現(xiàn)顏色識(shí)別與抓取的?

RK3568國產(chǎn)實(shí)驗(yàn)箱+人工智能機(jī)械臂:跳舞、疊羅漢、夾方塊、積木搬運(yùn)案例全解!
“雙保險(xiǎn)”鎖緊機(jī)制:YM28系列連接器為機(jī)械臂提供高牢靠的大電流連接

機(jī)械臂的高效運(yùn)作,連接器起關(guān)鍵作用
【原創(chuàng)】 drawbot 平面機(jī)械臂scara寫字畫畫機(jī)器人DIY教程貼
OrangePi AIpro應(yīng)用:機(jī)械臂應(yīng)用開發(fā)指南






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論